Das könnte Ihnen auch gefallen
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorVon EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNoch keine Bewertungen
- Self Balancing Two Wheeled Robot ReportDokument11 SeitenSelf Balancing Two Wheeled Robot Reportnetlvr0Noch keine Bewertungen
- Control of DC Motor Using Different Control StrategiesVon EverandControl of DC Motor Using Different Control StrategiesNoch keine Bewertungen
- Nonlinear PD Regulation For Ball and Beam SystemDokument15 SeitenNonlinear PD Regulation For Ball and Beam SystemLissete VergaraNoch keine Bewertungen
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetBewertung: 2 von 5 Sternen2/5 (1)
- Pendulum Positioning System Actuated by Dual Motorized PropellersDokument4 SeitenPendulum Positioning System Actuated by Dual Motorized Propellerspatmos666Noch keine Bewertungen
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNoch keine Bewertungen
- Space Engineering Lab Manual MDokument43 SeitenSpace Engineering Lab Manual Mmanikandan_murugaiahNoch keine Bewertungen
- Design of Optimal Controllers For A Ball & Beam SystemDokument10 SeitenDesign of Optimal Controllers For A Ball & Beam SystemGRD JournalsNoch keine Bewertungen
- Experiment 2Dokument8 SeitenExperiment 2Usama NadeemNoch keine Bewertungen
- Nonlinear PD Regulation For Ball and Beam System: Wen YuDokument15 SeitenNonlinear PD Regulation For Ball and Beam System: Wen YuJessica RossNoch keine Bewertungen
- Long-Horizon Model Predictive Control of Induction Motor DriveDokument15 SeitenLong-Horizon Model Predictive Control of Induction Motor DriveabbasNoch keine Bewertungen
- Performance Comparison Between Fuzzy Logic Controller (FLC) and PID Controller For A Highly Nonlinear Two-Wheels Balancing RobotDokument6 SeitenPerformance Comparison Between Fuzzy Logic Controller (FLC) and PID Controller For A Highly Nonlinear Two-Wheels Balancing RobotVignesh RamakrishnanNoch keine Bewertungen
- Effect of Fuzzy Logic Controller Implementation On A Digitally Controlled Robot MovementDokument12 SeitenEffect of Fuzzy Logic Controller Implementation On A Digitally Controlled Robot MovementchichuNoch keine Bewertungen
- Designing The Tracking System For A String of Photovoltaic ModulesDokument6 SeitenDesigning The Tracking System For A String of Photovoltaic ModulesMohamed Ali ChebbiNoch keine Bewertungen
- Active Magnetic BearingsDokument20 SeitenActive Magnetic BearingsBalu Prakash100% (2)
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDokument5 SeitenSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNoch keine Bewertungen
- Simulation of Sensorless Permanent Magnetic Brushless DC Motor Control SystemDokument5 SeitenSimulation of Sensorless Permanent Magnetic Brushless DC Motor Control SystemLê Quốc ViệtNoch keine Bewertungen
- Power System Stabilizers As Undergraduate Control Design ProjectsDokument8 SeitenPower System Stabilizers As Undergraduate Control Design Projectsabhikirk99Noch keine Bewertungen
- Design of Magnetic Levitation System Undergraduate: A Control An ProjectDokument5 SeitenDesign of Magnetic Levitation System Undergraduate: A Control An ProjectIshrat JamalNoch keine Bewertungen
- Nicola - Marcel - ICATE 2016Dokument6 SeitenNicola - Marcel - ICATE 2016Marcel NicolaNoch keine Bewertungen
- Vector Control Simulation of AC MotorDokument16 SeitenVector Control Simulation of AC MotorJosedocampocastro100% (1)
- A Review of Active Magnetic Bearing Control Technology: Tao Huang, Min Zheng, Guangfeng ZhangDokument6 SeitenA Review of Active Magnetic Bearing Control Technology: Tao Huang, Min Zheng, Guangfeng ZhangNguyen Van QuyenNoch keine Bewertungen
- Literature Review: Mechanical SystemDokument3 SeitenLiterature Review: Mechanical SystemJibraeelKhanNoch keine Bewertungen
- DVNHFRGNDokument10 SeitenDVNHFRGNashikhmd4467Noch keine Bewertungen
- Design and Implementation of Ball and Beam System Using PID ControllerDokument9 SeitenDesign and Implementation of Ball and Beam System Using PID ControllerDeda MrazNoch keine Bewertungen
- Control System of The Wiredrawing Machine1Dokument8 SeitenControl System of The Wiredrawing Machine1Vadim CazacNoch keine Bewertungen
- 00asme Maas Schulte FroehlekeDokument16 Seiten00asme Maas Schulte Froehlekeanoopk222Noch keine Bewertungen
- Double Closed-Loop PI Controller Tuning For MotorDokument8 SeitenDouble Closed-Loop PI Controller Tuning For MotorvrajakisoriDasiNoch keine Bewertungen
- First Steps Towards An Open Control Architecture For A PUMA 560Dokument6 SeitenFirst Steps Towards An Open Control Architecture For A PUMA 560Rajeev GargNoch keine Bewertungen
- Robot Dynamics: Q G Q Q Q C Q Q MDokument8 SeitenRobot Dynamics: Q G Q Q Q C Q Q MadolfoclesNoch keine Bewertungen
- George Constantinesco Torque Converter Analysis by Simulink PDFDokument6 SeitenGeorge Constantinesco Torque Converter Analysis by Simulink PDFslysoft.20009951Noch keine Bewertungen
- Implementation of Inverted Pendulum Control, Plunks On Miscellaneous TacticsDokument6 SeitenImplementation of Inverted Pendulum Control, Plunks On Miscellaneous TacticsirqoviNoch keine Bewertungen
- Inverted PendulumDokument18 SeitenInverted PendulumLingxi HuangNoch keine Bewertungen
- Implementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicDokument4 SeitenImplementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicJessica RossNoch keine Bewertungen
- Speed Regulation of Induction Motor Using Sliding Mode Control SchemeDokument5 SeitenSpeed Regulation of Induction Motor Using Sliding Mode Control SchemeranaateeqNoch keine Bewertungen
- LCS Lab 3Dokument11 SeitenLCS Lab 3Waleed RazzaqNoch keine Bewertungen
- Design and Implementation of Model Predictive Control For Electrical Motor DrivesDokument12 SeitenDesign and Implementation of Model Predictive Control For Electrical Motor Drivestariq76Noch keine Bewertungen
- A Study On The Conventional and Fuzzy Control Steel-Cutting ProcessDokument5 SeitenA Study On The Conventional and Fuzzy Control Steel-Cutting ProcessGökhan BaytekinNoch keine Bewertungen
- Simulation work on Fractional Order PIλ Control Strategy for speed control of DC motor based on stability boundary locus methodDokument7 SeitenSimulation work on Fractional Order PIλ Control Strategy for speed control of DC motor based on stability boundary locus methodseventhsensegroupNoch keine Bewertungen
- Mathematical Modeling Simulation and Control of Ball and Beam SystemDokument5 SeitenMathematical Modeling Simulation and Control of Ball and Beam SystemCamilo Andrés BeltránNoch keine Bewertungen
- A Review On Rapid Control of A Brushless Motor in An Hybrid SystemDokument4 SeitenA Review On Rapid Control of A Brushless Motor in An Hybrid Systemsunil kumarNoch keine Bewertungen
- Điều khiển theo dõi tốc độ của động cơ đồng bộ nam châm vĩnh cửu với bộ quan sát trạng thái và mô-men xoắn tảiDokument10 SeitenĐiều khiển theo dõi tốc độ của động cơ đồng bộ nam châm vĩnh cửu với bộ quan sát trạng thái và mô-men xoắn tảiNguyễn Văn HoàNoch keine Bewertungen
- Active Suspension System Energy Control 2009 IFAC Proceedings VolumesDokument7 SeitenActive Suspension System Energy Control 2009 IFAC Proceedings VolumesKeneni AlemayehuNoch keine Bewertungen
- Nonlinear Control of Active Magnetic Bearings A Backstepping Approach Marcio S. de Queiroz and Darren M. Dawson, Senior Member, IEEEDokument8 SeitenNonlinear Control of Active Magnetic Bearings A Backstepping Approach Marcio S. de Queiroz and Darren M. Dawson, Senior Member, IEEEVu MinhNoch keine Bewertungen
- Analysis of Windscreen Wiper Mechanism Using MSC AdamsDokument15 SeitenAnalysis of Windscreen Wiper Mechanism Using MSC AdamsDeepak SomanNoch keine Bewertungen
- Fractional Order PID Control of Rotor Suspension by Active Magnetic BearingsDokument31 SeitenFractional Order PID Control of Rotor Suspension by Active Magnetic BearingsNguyen Van QuyenNoch keine Bewertungen
- Sensorless Control PMSMDokument5 SeitenSensorless Control PMSMSandeep RaiNoch keine Bewertungen
- TRMS State Feedback 1Dokument5 SeitenTRMS State Feedback 1KKWNoch keine Bewertungen
- Simulation of Speed Control of Brushless DC Motor, With Fuzzy Logic ControllerDokument6 SeitenSimulation of Speed Control of Brushless DC Motor, With Fuzzy Logic ControllerPradeepAgrahariNoch keine Bewertungen
- Modeling and Control of An Electric Arc FurnaceDokument6 SeitenModeling and Control of An Electric Arc FurnaceChristopher LloydNoch keine Bewertungen
- Chapter 8Dokument28 SeitenChapter 8HemantNoch keine Bewertungen
- Commande San Modele Robot A 2dllDokument18 SeitenCommande San Modele Robot A 2dllElleuch DorsafNoch keine Bewertungen
- Sliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouiDokument15 SeitenSliding Controller of Switched Reluctance Motor: Ahmed Tahour and Abdel Ghani AissaouihasanmasoudiNoch keine Bewertungen
- Performance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemDokument5 SeitenPerformance Comparison Between LQR and PID Controller For An Inverted Pendulum SystemSanjiv CrNoch keine Bewertungen
- 0291 Icnsc231Dokument6 Seiten0291 Icnsc231Karthik Annamalai N RNoch keine Bewertungen
- Classic Continuous-Time Control Methods Applied To The Ball and Beam SystemDokument6 SeitenClassic Continuous-Time Control Methods Applied To The Ball and Beam SystemdiegoNoch keine Bewertungen
- Inverted PendulumDokument7 SeitenInverted PendulumHowlNoch keine Bewertungen
- Modelling and Control of Ball and Beam System Using PID ControllerDokument5 SeitenModelling and Control of Ball and Beam System Using PID ControllerMichaelNoch keine Bewertungen
- Research and Apply PID Hybrid Fuzzy Control TechnologyDokument6 SeitenResearch and Apply PID Hybrid Fuzzy Control TechnologyhoangepuNoch keine Bewertungen
- Cis 00007Dokument94 SeitenCis 00007Irawan MalikNoch keine Bewertungen
- Malik 2020 J. Phys. Conf. Ser. 1500 012036Dokument8 SeitenMalik 2020 J. Phys. Conf. Ser. 1500 012036Irawan MalikNoch keine Bewertungen
- Antena TrackerDokument82 SeitenAntena TrackerIrawan MalikNoch keine Bewertungen
- Aluminum Casting Laboratory: To Develop Competencies of Vocational High School Teacher CandidateDokument5 SeitenAluminum Casting Laboratory: To Develop Competencies of Vocational High School Teacher CandidatezainNoch keine Bewertungen
- IndexDokument1 SeiteIndexIrawan MalikNoch keine Bewertungen
- Simulation and Animation of Mechanical Systems: HUMUSOFT, Prague, Czech RepublicDokument11 SeitenSimulation and Animation of Mechanical Systems: HUMUSOFT, Prague, Czech RepublicIrawan MalikNoch keine Bewertungen
- FlexPDE7 DebugDokument1 SeiteFlexPDE7 DebugIrawan MalikNoch keine Bewertungen
- Tadano Gt-550e-2 - O1-1e PDFDokument214 SeitenTadano Gt-550e-2 - O1-1e PDFtincho_0026100% (1)
- Inspection and Quality Contr: Prof. S. S. PandeDokument28 SeitenInspection and Quality Contr: Prof. S. S. PandeINSTECH ConsultingNoch keine Bewertungen
- XDDokument1 SeiteXDJoaquin Conde GarayNoch keine Bewertungen
- AnyAnu PDFDokument5 SeitenAnyAnu PDFIrawan MalikNoch keine Bewertungen
- Lec 19Dokument38 SeitenLec 19ansariNoch keine Bewertungen
- Entropy: Modeling of A Mass-Spring-Damper System by Fractional Derivatives With and Without A Singular KernelDokument15 SeitenEntropy: Modeling of A Mass-Spring-Damper System by Fractional Derivatives With and Without A Singular KernelIrawan MalikNoch keine Bewertungen
- XDDokument1 SeiteXDJoaquin Conde GarayNoch keine Bewertungen
- DC MachinesDokument54 SeitenDC MachinesPrathap VuyyuruNoch keine Bewertungen
- Inspection and Quality Contr: Prof. S. S. PandeDokument28 SeitenInspection and Quality Contr: Prof. S. S. PandeINSTECH ConsultingNoch keine Bewertungen
- CBCS - Manufacturing Technology - AKTU PDFDokument32 SeitenCBCS - Manufacturing Technology - AKTU PDFIrawan MalikNoch keine Bewertungen
- Fulltext03 PDFDokument70 SeitenFulltext03 PDFIrawan MalikNoch keine Bewertungen
- 07-Sky Catcher Flight Test Spin TestingDokument63 Seiten07-Sky Catcher Flight Test Spin TestingIrawan MalikNoch keine Bewertungen
- Design Optimizationofprecisioncastingforresidualstressreduction PDFDokument11 SeitenDesign Optimizationofprecisioncastingforresidualstressreduction PDFShravan GawandeNoch keine Bewertungen
- Inspection and Quality Contr: Prof. S. S. PandeDokument28 SeitenInspection and Quality Contr: Prof. S. S. PandeINSTECH ConsultingNoch keine Bewertungen
- 6.04 Laws and ForcesDokument21 Seiten6.04 Laws and ForcesIrawan MalikNoch keine Bewertungen
- Ciobanu2014 PDFDokument13 SeitenCiobanu2014 PDFIrawan MalikNoch keine Bewertungen
- Ball-And-Beam Laboratory System Controlled by Simulink Model Through Dedicated Microcontrolled-Matlab Data Exchange ProtocolDokument11 SeitenBall-And-Beam Laboratory System Controlled by Simulink Model Through Dedicated Microcontrolled-Matlab Data Exchange ProtocolIrawan MalikNoch keine Bewertungen
- Oven Destilator Pengolah Sampah Plastik Ramah Lingkungan "Pemanfaatan Asap Cair Hasil Olahan Oven Destilator Untuk Pengawetan Kayu"Dokument8 SeitenOven Destilator Pengolah Sampah Plastik Ramah Lingkungan "Pemanfaatan Asap Cair Hasil Olahan Oven Destilator Untuk Pengawetan Kayu"Irawan MalikNoch keine Bewertungen
- Class Notes Engineering Graphics Basic ConceptsDokument29 SeitenClass Notes Engineering Graphics Basic ConceptsIrawan MalikNoch keine Bewertungen
- Wiress PCI (-E) Adapter QIGDokument2 SeitenWiress PCI (-E) Adapter QIGIrawan MalikNoch keine Bewertungen
- Chassis DesignDokument113 SeitenChassis DesignKishor Bharat83% (6)
- English Words in AerodynamicsDokument22 SeitenEnglish Words in AerodynamicsIrawan MalikNoch keine Bewertungen
- Concrete Tunnel Design and Calculation Spreadsheet Based On AASHTO and ACIDokument3 SeitenConcrete Tunnel Design and Calculation Spreadsheet Based On AASHTO and ACIFirat PulatNoch keine Bewertungen
- Mixing L 6-7Dokument60 SeitenMixing L 6-7hyde2520015754Noch keine Bewertungen
- V + V Plus - EN1Dokument6 SeitenV + V Plus - EN1james.anitNoch keine Bewertungen
- The Tenth House in AstrologyDokument6 SeitenThe Tenth House in AstrologytratakNoch keine Bewertungen
- A Butterfly Effect Volume 1 (Years 1 - 2)Dokument362 SeitenA Butterfly Effect Volume 1 (Years 1 - 2)xdyj2005Noch keine Bewertungen
- Esab Ok 55 (3.2 MM)Dokument1 SeiteEsab Ok 55 (3.2 MM)DHANEESH VELLILAPULLINoch keine Bewertungen
- Iec 62031 PDFDokument16 SeitenIec 62031 PDFAlbertoNoch keine Bewertungen
- Job Hazard Analysis Form: Section A: Task InformationDokument3 SeitenJob Hazard Analysis Form: Section A: Task InformationHasnei NNoch keine Bewertungen
- Industrial TYROLITc 21Dokument611 SeitenIndustrial TYROLITc 21kamilNoch keine Bewertungen
- The Guardian Weekly 9-02-2024-2Dokument64 SeitenThe Guardian Weekly 9-02-2024-2krris.galNoch keine Bewertungen
- HINO Dutro Fault Codes List PDFDokument4 SeitenHINO Dutro Fault Codes List PDFANH LÊNoch keine Bewertungen
- HYSYSDokument390 SeitenHYSYSEfosaUwaifoNoch keine Bewertungen
- HSD Spindle Manual ES789 ES799 EnglishDokument62 SeitenHSD Spindle Manual ES789 ES799 EnglishCamilo Andrés Lara castilloNoch keine Bewertungen
- Read The Following Paragraphs and Answer The Questions That FollowDokument18 SeitenRead The Following Paragraphs and Answer The Questions That FollowMary Ann RanayNoch keine Bewertungen
- The Anaphylactic ShockDokument8 SeitenThe Anaphylactic ShockRooby JeanpierreNoch keine Bewertungen
- Green Revolution: It's Acheivements and FailuresDokument24 SeitenGreen Revolution: It's Acheivements and FailuresSingh HarmanNoch keine Bewertungen
- Women's Prints & Graphics Forecast A/W 24/25: Future TerrainsDokument15 SeitenWomen's Prints & Graphics Forecast A/W 24/25: Future TerrainsPari Sajnani100% (1)
- Saturated Salt Solutions and %RHDokument2 SeitenSaturated Salt Solutions and %RHsamman149686100% (1)
- Inhalation AnestheticsDokument27 SeitenInhalation AnestheticsMarcelitaTaliaDuwiriNoch keine Bewertungen
- Booster Mock Test For NEETDokument15 SeitenBooster Mock Test For NEETDrNoch keine Bewertungen
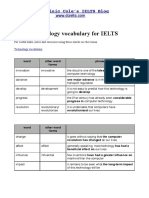
- Technology VocabularyDokument3 SeitenTechnology VocabularyChixo GalaxyNoch keine Bewertungen
- Process Pipeline Repair ClampsDokument4 SeitenProcess Pipeline Repair ClampsHeru SuryoNoch keine Bewertungen
- Vortex Based MathematicsDokument14 SeitenVortex Based Mathematicssepsis19100% (2)
- Research Paper On TurbojetDokument6 SeitenResearch Paper On Turbojetqptwukrif100% (1)
- Chapter 11Dokument10 SeitenChapter 11NungkiwidyasNoch keine Bewertungen
- Learn Horse Riding: at HPRCDokument16 SeitenLearn Horse Riding: at HPRCAkashNoch keine Bewertungen
- The Symbols Found in TarotDokument17 SeitenThe Symbols Found in TarotPEdro100% (1)
- Rider's Manual: BMW MotorradDokument136 SeitenRider's Manual: BMW MotorradAlex Quintana100% (1)
- NarcolepsyDokument12 SeitenNarcolepsyapi-489712369Noch keine Bewertungen
- Bio-Gro HyperGrowth Lean Mass FinalDokument17 SeitenBio-Gro HyperGrowth Lean Mass FinalMarcelo Calderón Cruz80% (5)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialVon EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Electronics All-in-One For Dummies, 3rd EditionVon EverandElectronics All-in-One For Dummies, 3rd EditionBewertung: 5 von 5 Sternen5/5 (2)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesVon EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesBewertung: 5 von 5 Sternen5/5 (1)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsVon EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsBewertung: 3.5 von 5 Sternen3.5/5 (2)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosVon EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosBewertung: 5 von 5 Sternen5/5 (1)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tVon EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tBewertung: 4.5 von 5 Sternen4.5/5 (27)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionVon EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionBewertung: 4.5 von 5 Sternen4.5/5 (543)
- Analog Design and Simulation Using OrCAD Capture and PSpiceVon EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceNoch keine Bewertungen
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonVon EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonBewertung: 5 von 5 Sternen5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersVon Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersBewertung: 5 von 5 Sternen5/5 (1)
- Teach Yourself Electricity and Electronics, 6th EditionVon EverandTeach Yourself Electricity and Electronics, 6th EditionBewertung: 3.5 von 5 Sternen3.5/5 (15)
- Build Your Own Electronics WorkshopVon EverandBuild Your Own Electronics WorkshopBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeVon EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeBewertung: 4.5 von 5 Sternen4.5/5 (10)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Von EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Bewertung: 4.5 von 5 Sternen4.5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesVon EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesBewertung: 5 von 5 Sternen5/5 (1)
- Heat Transfer Engineering: Fundamentals and TechniquesVon EverandHeat Transfer Engineering: Fundamentals and TechniquesBewertung: 4 von 5 Sternen4/5 (1)
- Power Electronics Diploma Interview Q&A: Career GuideVon EverandPower Electronics Diploma Interview Q&A: Career GuideNoch keine Bewertungen
- Current Interruption Transients CalculationVon EverandCurrent Interruption Transients CalculationBewertung: 4 von 5 Sternen4/5 (1)