Das könnte Ihnen auch gefallen
- A Brief Introduction To Controller Area NetworkDokument6 SeitenA Brief Introduction To Controller Area NetworkSergio FinkNoch keine Bewertungen
- I Jcs It 2012030294Dokument5 SeitenI Jcs It 2012030294Ahmed AricheNoch keine Bewertungen
- A Brief Introduction To Controller Area Network PDFDokument6 SeitenA Brief Introduction To Controller Area Network PDFSiva100% (1)
- A Brief Introduction To Controller Area Network PDFDokument6 SeitenA Brief Introduction To Controller Area Network PDFSivaNoch keine Bewertungen
- Harman Can CdabuDokument61 SeitenHarman Can CdabucricrigreiergriNoch keine Bewertungen
- Computer Solutions LTD: CAN - A Brief TutorialDokument7 SeitenComputer Solutions LTD: CAN - A Brief Tutorialhitech_emi3591Noch keine Bewertungen
- NI Tutorial 2732 enDokument5 SeitenNI Tutorial 2732 enmanumanu12Noch keine Bewertungen
- Lpc17xx CanDokument22 SeitenLpc17xx Canszczupi87Noch keine Bewertungen
- CANopen Dictionary v7Dokument67 SeitenCANopen Dictionary v7bozzec100% (1)
- CanphyDokument8 SeitenCanphyapi-3721578Noch keine Bewertungen
- Debugging Can, Lin, and Flexray Automotive Buses With An OscilloscopeDokument20 SeitenDebugging Can, Lin, and Flexray Automotive Buses With An OscilloscopeLeonardo Gurman100% (2)
- CAN Bus Electrical Interface CircuitDokument9 SeitenCAN Bus Electrical Interface CircuitJhonTorresRamiresNoch keine Bewertungen
- MCB2300 CanDokument14 SeitenMCB2300 CanMichaelNoch keine Bewertungen
- Report PDFDokument40 SeitenReport PDFrakshit KandpalNoch keine Bewertungen
- CAN BusDokument14 SeitenCAN BusSergio BritoNoch keine Bewertungen
- CAN BusDokument9 SeitenCAN Buspablodanielrigo100% (2)
- The Controller Area NetworkDokument70 SeitenThe Controller Area NetworkRAJI00675% (4)
- Arm Can Primer 2Dokument20 SeitenArm Can Primer 2abhiii86Noch keine Bewertungen
- Automotive Data Communication BusesDokument3 SeitenAutomotive Data Communication BusesSilvio MadetyNoch keine Bewertungen
- CAN TutorialDokument22 SeitenCAN TutorialApoorva BhattNoch keine Bewertungen
- CAN TutorialDokument22 SeitenCAN TutorialNaveen BasavarajacharNoch keine Bewertungen
- Basic Study of Automotive Protocols / Standards: Arun Nath K SDokument15 SeitenBasic Study of Automotive Protocols / Standards: Arun Nath K SnickynandanamNoch keine Bewertungen
- Can Bus Explained 2021Dokument22 SeitenCan Bus Explained 2021Haji RashidNoch keine Bewertungen
- Asset1R CANBus Overview FinalDokument4 SeitenAsset1R CANBus Overview FinalKhor Tze MingNoch keine Bewertungen
- CablesDokument2 SeitenCablesYuri WentzcovitchNoch keine Bewertungen
- The Implementation of CAN Bus Network of PLC Based On ARMDokument3 SeitenThe Implementation of CAN Bus Network of PLC Based On ARMNitin ChavanNoch keine Bewertungen
- AI Exp 7Dokument7 SeitenAI Exp 7akash kurheNoch keine Bewertungen
- Modem Comtech Cdm570A L IPDokument6 SeitenModem Comtech Cdm570A L IPsupri yonoNoch keine Bewertungen
- 1.CAN IntroductionDokument5 Seiten1.CAN IntroductionKrishanu ModakNoch keine Bewertungen
- What Is CANDokument1 SeiteWhat Is CANra1958jaNoch keine Bewertungen
- CanBus WikipidiaDokument23 SeitenCanBus WikipidiaZaw Min NaingNoch keine Bewertungen
- CAN - A Brief Tutorial: Nuts and BoltsDokument4 SeitenCAN - A Brief Tutorial: Nuts and Boltsmailtomyidyaar98100% (1)
- IAM Devicenet OverviewDokument1 SeiteIAM Devicenet OverviewIndustrial Automation and MechatronicsNoch keine Bewertungen
- Combining Canopen and Sae J1939 NetworksDokument5 SeitenCombining Canopen and Sae J1939 NetworksFouad NadjiNoch keine Bewertungen
- Ford BusDokument102 SeitenFord BusEdgar Solis50% (2)
- Moxa PDFDokument6 SeitenMoxa PDFksenthil77Noch keine Bewertungen
- OBD II Network Diagnostics StateDokument18 SeitenOBD II Network Diagnostics StateCarlos CalzadaNoch keine Bewertungen
- Ethernet Industrial - Explicativo de Phoenix ContactDokument48 SeitenEthernet Industrial - Explicativo de Phoenix Contactluk@_sNoch keine Bewertungen
- Ijett V4i10p127 PDFDokument6 SeitenIjett V4i10p127 PDFAshok Siva Kumar PoojalaNoch keine Bewertungen
- Gwy 300Dokument5 SeitenGwy 300Maitry ShahNoch keine Bewertungen
- CDM-625A-EN Advanced Satellite ModemDokument5 SeitenCDM-625A-EN Advanced Satellite ModemEsapa EyongesiNoch keine Bewertungen
- At91sam7 - CanDokument58 SeitenAt91sam7 - Cangopismiles1987Noch keine Bewertungen
- Wcdma Ran12.0 New Hspa Features-20091230-B-1.0Dokument33 SeitenWcdma Ran12.0 New Hspa Features-20091230-B-1.0Habib BaleNoch keine Bewertungen
- Comm PRTCDokument47 SeitenComm PRTCShrinidhi HegdeNoch keine Bewertungen
- CAN BusDokument33 SeitenCAN BusVinod Lk100% (8)
- Modems Cdm-625-En Advanced Satellite Modem With Doubletalk Carrier-In-CarrierDokument5 SeitenModems Cdm-625-En Advanced Satellite Modem With Doubletalk Carrier-In-CarrierarzeszutNoch keine Bewertungen
- Modems Cdm-625 Advanced Satellite Modem With Doubletalk Carrier-In-CarrierDokument5 SeitenModems Cdm-625 Advanced Satellite Modem With Doubletalk Carrier-In-CarrierarzeszutNoch keine Bewertungen
- Selecting A Serial Bus: Application Note 3967Dokument7 SeitenSelecting A Serial Bus: Application Note 3967nevdullNoch keine Bewertungen
- Wrc-Canr-Df-Xx Series 4 Quick Start Guide: Sold and Supported by Prosoft Technology, IncDokument1 SeiteWrc-Canr-Df-Xx Series 4 Quick Start Guide: Sold and Supported by Prosoft Technology, IncMauricio OliveiraNoch keine Bewertungen
- Advanced PIC18 Projects-CAN Bus ProjectsDokument40 SeitenAdvanced PIC18 Projects-CAN Bus ProjectsManu ManuNoch keine Bewertungen
- Abi Research LpwansDokument16 SeitenAbi Research Lpwanstestuser5791Noch keine Bewertungen
- CAN Based Protocols in Avionics MustReadDokument33 SeitenCAN Based Protocols in Avionics MustReada_luis67% (3)
- AS-interface Simple, Robust, Device-Level BusDokument20 SeitenAS-interface Simple, Robust, Device-Level BusmdarwishbpNoch keine Bewertungen
- Introduction To In-Vehicle NetworkingDokument21 SeitenIntroduction To In-Vehicle NetworkingryandaprakosoNoch keine Bewertungen
- High-Performance D/A-Converters: Application to Digital TransceiversVon EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNoch keine Bewertungen
- Indoor Radio Planning: A Practical Guide for 2G, 3G and 4GVon EverandIndoor Radio Planning: A Practical Guide for 2G, 3G and 4GBewertung: 5 von 5 Sternen5/5 (1)
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsVon EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNoch keine Bewertungen
- Data Acquisition from HD Vehicles Using J1939 CAN BusVon EverandData Acquisition from HD Vehicles Using J1939 CAN BusNoch keine Bewertungen
- LEHF0145-00Dokument2 SeitenLEHF0145-00dubimouNoch keine Bewertungen
- Service Manual - TruckDokument523 SeitenService Manual - Truckdubimou67% (3)
- C15 Genset SchematicDokument8 SeitenC15 Genset SchematicdubimouNoch keine Bewertungen
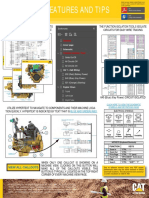
- View All Callouts: Function Isolation ToolsDokument19 SeitenView All Callouts: Function Isolation ToolsdubimouNoch keine Bewertungen
- DP50K SchematicsDokument2 SeitenDP50K Schematicsdubimou100% (1)
- Service Manual - Engine PDFDokument190 SeitenService Manual - Engine PDFdubimou100% (3)
- Operation and Maintenance Manual PDFDokument222 SeitenOperation and Maintenance Manual PDFdubimouNoch keine Bewertungen
- How To Change The Network Connection Priority in Windows 7Dokument9 SeitenHow To Change The Network Connection Priority in Windows 7dubimouNoch keine Bewertungen
- Operation and Maintenance Manual PDFDokument222 SeitenOperation and Maintenance Manual PDFdubimouNoch keine Bewertungen
- Service Manual - TruckDokument396 SeitenService Manual - Truckdubimou100% (5)
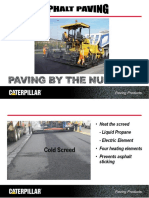
- Paving by The NumbersDokument45 SeitenPaving by The NumbersdubimouNoch keine Bewertungen
- The CAT Engine Product LineDokument17 SeitenThe CAT Engine Product LinedubimouNoch keine Bewertungen
- 1106D Fuel System Diagnosis ProcedureDokument2 Seiten1106D Fuel System Diagnosis ProceduredubimouNoch keine Bewertungen
- Top Causes of An ECM FailureDokument2 SeitenTop Causes of An ECM FailuredubimouNoch keine Bewertungen
- Contoh Kuda-Kuda Untuk Pak Henry Truss D&EKK1L KDokument1 SeiteContoh Kuda-Kuda Untuk Pak Henry Truss D&EKK1L KDhany ArsoNoch keine Bewertungen
- MCA Proposal For OutsourcingDokument2 SeitenMCA Proposal For OutsourcingLazaros KarapouNoch keine Bewertungen
- Links To GoodnessDokument194 SeitenLinks To GoodnessKevin Itwaru0% (3)
- University of MauritiusDokument4 SeitenUniversity of MauritiusAtish KissoonNoch keine Bewertungen
- Tutorial 1 Process Heat TransferDokument4 SeitenTutorial 1 Process Heat TransferSuraya JohariNoch keine Bewertungen
- 02-15 QCS 2014Dokument17 Seiten02-15 QCS 2014Raja Ahmed HassanNoch keine Bewertungen
- A 150.xx Service Black/ITU Cartridge Motor Error On A Lexmark C54x and X54x Series PrinterDokument4 SeitenA 150.xx Service Black/ITU Cartridge Motor Error On A Lexmark C54x and X54x Series Printerahmed salemNoch keine Bewertungen
- Electrical Installation Assignment 2023Dokument2 SeitenElectrical Installation Assignment 2023Monday ChristopherNoch keine Bewertungen
- Samsung UDC and UEC Series Video Wall DisplaysDokument12 SeitenSamsung UDC and UEC Series Video Wall DisplaysWebAntics.com Online Shopping StoreNoch keine Bewertungen
- AWS Migrate Resources To New RegionDokument23 SeitenAWS Migrate Resources To New Regionsruthi raviNoch keine Bewertungen
- KR 10 Scara: The Compact Robot For Low PayloadsDokument4 SeitenKR 10 Scara: The Compact Robot For Low PayloadsBogdan123Noch keine Bewertungen
- Material Safety Data Sheet: Pilot IIDokument7 SeitenMaterial Safety Data Sheet: Pilot IIBeyar. ShNoch keine Bewertungen
- Level of Life Skills Dev 5Dokument59 SeitenLevel of Life Skills Dev 5MJ BotorNoch keine Bewertungen
- ISA 265 Standalone 2009 HandbookDokument16 SeitenISA 265 Standalone 2009 HandbookAbraham ChinNoch keine Bewertungen
- Manufacturer MumbaiDokument336 SeitenManufacturer MumbaiNafa NuksanNoch keine Bewertungen
- 1849 1862 Statutes at Large 601-779Dokument200 Seiten1849 1862 Statutes at Large 601-779ncwazzyNoch keine Bewertungen
- BS Company RecordsDokument2 SeitenBS Company RecordstNoch keine Bewertungen
- E-Payment (Telecom Operatoers)Dokument12 SeitenE-Payment (Telecom Operatoers)Ahmed SelimNoch keine Bewertungen
- Addendum No.1: Indianapolis Metropolitan Airport T-Hangar Taxilane Rehabilitation IAA Project No. M-12-032Dokument22 SeitenAddendum No.1: Indianapolis Metropolitan Airport T-Hangar Taxilane Rehabilitation IAA Project No. M-12-032stretch317Noch keine Bewertungen
- Pain Audit ToolsDokument10 SeitenPain Audit ToolsIrmela CoricNoch keine Bewertungen
- Meeting Protocol and Negotiation Techniques in India and AustraliaDokument3 SeitenMeeting Protocol and Negotiation Techniques in India and AustraliaRose4182Noch keine Bewertungen
- Rules and Regulations of Asian Parliamentary Debating FormatDokument2 SeitenRules and Regulations of Asian Parliamentary Debating FormatmahmudNoch keine Bewertungen
- White and Yellow Reflective Thermoplastic Striping Material (Solid Form)Dokument2 SeitenWhite and Yellow Reflective Thermoplastic Striping Material (Solid Form)FRANZ RICHARD SARDINAS MALLCONoch keine Bewertungen
- WHS Hazard Identification and Incident Reporting ProcedureDokument6 SeitenWHS Hazard Identification and Incident Reporting ProcedureJessica SimsNoch keine Bewertungen
- Asia-Pacific/Arab Gulf Marketscan: Volume 39 / Issue 65 / April 2, 2020Dokument21 SeitenAsia-Pacific/Arab Gulf Marketscan: Volume 39 / Issue 65 / April 2, 2020Donnie HavierNoch keine Bewertungen
- Caso 1 - Tunel Sismico BoluDokument4 SeitenCaso 1 - Tunel Sismico BoluCarlos Catalán CórdovaNoch keine Bewertungen
- L-2 Steel SectionsDokument23 SeitenL-2 Steel SectionsRukhsar JoueNoch keine Bewertungen
- 00 Saip 76Dokument10 Seiten00 Saip 76John BuntalesNoch keine Bewertungen
- A Job InterviewDokument8 SeitenA Job Interviewa.rodriguezmarcoNoch keine Bewertungen
- 10.isca RJCS 2015 106Dokument5 Seiten10.isca RJCS 2015 106Touhid IslamNoch keine Bewertungen