Das könnte Ihnen auch gefallen
- Factura ElektraDokument1 SeiteFactura ElektraYoan BravoNoch keine Bewertungen
- Proceso curtiembre: 4 etapas limpieza curtido re curtimiento acabadoDokument6 SeitenProceso curtiembre: 4 etapas limpieza curtido re curtimiento acabadoChRiss CarvajalNoch keine Bewertungen
- 6th Central Pay Commission Salary CalculatorDokument15 Seiten6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Controladores TípicosDokument23 SeitenControladores TípicosAlfonso Peralta DíazNoch keine Bewertungen
- Parte 1Dokument9 SeitenParte 1Felipe Saenz AngelNoch keine Bewertungen
- TestamentoDokument4 SeitenTestamentoChRiss CarvajalNoch keine Bewertungen
- General MenteDokument2 SeitenGeneral MenteChRiss CarvajalNoch keine Bewertungen
- Capítulo 6Dokument30 SeitenCapítulo 6anarkopunk1122Noch keine Bewertungen
- Fracciones ParcialesDokument12 SeitenFracciones ParcialesChRiss CarvajalNoch keine Bewertungen
- Si Se Puede Especificar Un Modelo Con Propiedades Dinámicas DeseablesDokument2 SeitenSi Se Puede Especificar Un Modelo Con Propiedades Dinámicas DeseablesChRiss CarvajalNoch keine Bewertungen
- Si Se Puede Especificar Un Modelo Con Propiedades Dinámicas DeseablesDokument2 SeitenSi Se Puede Especificar Un Modelo Con Propiedades Dinámicas DeseablesChRiss CarvajalNoch keine Bewertungen
- Guía Calor y TemperaturaDokument5 SeitenGuía Calor y TemperaturaRodolfo100% (1)
- Canonicas PDFDokument12 SeitenCanonicas PDFHassael OrtegaNoch keine Bewertungen
- Ecuaciones de DiferenciaDokument14 SeitenEcuaciones de DiferenciaJavier CANoch keine Bewertungen
- Ecuaciones de DiferenciaDokument14 SeitenEcuaciones de DiferenciaJavier CANoch keine Bewertungen
- Cap 6Dokument8 SeitenCap 6ChRiss CarvajalNoch keine Bewertungen
- Cap 6Dokument8 SeitenCap 6ChRiss CarvajalNoch keine Bewertungen
- Capítulo 6Dokument30 SeitenCapítulo 6anarkopunk1122Noch keine Bewertungen
- Calculo Diferencial - Ejercicio4Dokument8 SeitenCalculo Diferencial - Ejercicio4pxppiezcNoch keine Bewertungen
- Ejercicios y Problemas Resueltos de Optimizacion de FuncionesDokument2 SeitenEjercicios y Problemas Resueltos de Optimizacion de FuncionesJancito Tlv EpsNoch keine Bewertungen
- Componentes de La Impedancia MecánicaDokument4 SeitenComponentes de La Impedancia MecánicaChRiss CarvajalNoch keine Bewertungen
- Guía Laboratorio Brazo Robot ScorbotDokument8 SeitenGuía Laboratorio Brazo Robot ScorbotChRiss CarvajalNoch keine Bewertungen
- Cooreccion Tablas de ErroresDokument5 SeitenCooreccion Tablas de ErroresChRiss CarvajalNoch keine Bewertungen
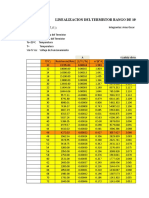
- Linealizacion Del ThermistorDokument6 SeitenLinealizacion Del ThermistorChRiss CarvajalNoch keine Bewertungen
- Mni Odometria Avance 1Dokument3 SeitenMni Odometria Avance 1ChRiss CarvajalNoch keine Bewertungen
- Componentes de La Impedancia MecánicaDokument4 SeitenComponentes de La Impedancia MecánicaChRiss CarvajalNoch keine Bewertungen
- Componentes de La Impedancia MecánicaDokument4 SeitenComponentes de La Impedancia MecánicaChRiss CarvajalNoch keine Bewertungen
- Manual de Usuario y Manual Del DesarrolladorDokument12 SeitenManual de Usuario y Manual Del DesarrolladorChRiss Carvajal100% (1)
- MemoriaDokument132 SeitenMemoriaChRiss CarvajalNoch keine Bewertungen
- Instrumentación BiomédicaDokument10 SeitenInstrumentación BiomédicaJesus NavaNoch keine Bewertungen
- Uso de Proteus Como Herramienta de DiseñoDokument21 SeitenUso de Proteus Como Herramienta de DiseñoDayiClaros100% (1)
- Comercio ElectronicoDokument7 SeitenComercio ElectronicoKenny SolerNoch keine Bewertungen
- Examen Prácticas de Laboratorio SS UCSM 2018 G2Dokument13 SeitenExamen Prácticas de Laboratorio SS UCSM 2018 G2Juan LlerenaNoch keine Bewertungen
- Tarea 4Dokument2 SeitenTarea 4Carlos tevexNoch keine Bewertungen
- Instructivo Taller 2Dokument5 SeitenInstructivo Taller 2Johany CampinoNoch keine Bewertungen
- Actividad 4 Mantenimiento IndustrialDokument21 SeitenActividad 4 Mantenimiento IndustrialCarlos Enrique BlancoNoch keine Bewertungen
- Conexión de Los Cables Del Panel FrontalDokument10 SeitenConexión de Los Cables Del Panel FrontalZara AlanocaNoch keine Bewertungen
- Manual PIER Firma de Contrato Por Representante de La Entidad PDFDokument13 SeitenManual PIER Firma de Contrato Por Representante de La Entidad PDFJorgeQuirozOviedoNoch keine Bewertungen
- Guía de estudio de CCNA 4 Capítulo 5Dokument6 SeitenGuía de estudio de CCNA 4 Capítulo 5jfvm666Noch keine Bewertungen
- Unidad III - Fundamentos de Modelos de Colas. Sistemas.Dokument31 SeitenUnidad III - Fundamentos de Modelos de Colas. Sistemas.Randall CarrionNoch keine Bewertungen
- Act 3Dokument3 SeitenAct 3JOHN HEMYNoch keine Bewertungen
- MONOGRAFIA 2023-Brandon UlisesDokument49 SeitenMONOGRAFIA 2023-Brandon UlisesBrandon Ulises Corona VasquezNoch keine Bewertungen
- Conductividad de Las SolucionesDokument4 SeitenConductividad de Las SolucionescaraguayNoch keine Bewertungen
- Rectificador de Onda CompletaDokument6 SeitenRectificador de Onda Completawilliam avilaNoch keine Bewertungen
- Herramientas de Una Hoja de Calculo - EV1Dokument7 SeitenHerramientas de Una Hoja de Calculo - EV1Jeancarlo MontanaNoch keine Bewertungen
- Flujos de información en la organizaciónDokument11 SeitenFlujos de información en la organizaciónJose Carlos Gonzalez ParedesNoch keine Bewertungen
- Circuitos Trifásicos (3f) BalanceadosDokument56 SeitenCircuitos Trifásicos (3f) BalanceadosMijhael Anatholi Romero MamaniNoch keine Bewertungen
- Terminos y Condiciones ChataDokument10 SeitenTerminos y Condiciones ChatasheadNoch keine Bewertungen
- Guia 8Dokument4 SeitenGuia 8cristian.gacituasanchezNoch keine Bewertungen
- PLANILLA PAC 2022 WebDokument11 SeitenPLANILLA PAC 2022 WebGISSELLE SOLIZ NOGALESNoch keine Bewertungen
- CatastroDokument1 SeiteCatastroOrlimar DelgadoNoch keine Bewertungen
- Generación de código intermedio y representacionesDokument3 SeitenGeneración de código intermedio y representacionesRicky ColungaNoch keine Bewertungen
- Actividad de Puntos Evaluables - Escenario 2 - Segundo Bloque - Teorico Fundamentos de Gestion InformaticaDokument5 SeitenActividad de Puntos Evaluables - Escenario 2 - Segundo Bloque - Teorico Fundamentos de Gestion InformaticaJohn ItzenNoch keine Bewertungen
- Estudio diagnóstico zonificación Alto AmazonasDokument155 SeitenEstudio diagnóstico zonificación Alto AmazonasGerardo SeminarioNoch keine Bewertungen
- Caso Eude IBMDokument3 SeitenCaso Eude IBMDiego Fernando Valencia ValenciaNoch keine Bewertungen
- Analisis y Diseño Orientado A Objetos - Grady Booch (Estracto PDFDokument38 SeitenAnalisis y Diseño Orientado A Objetos - Grady Booch (Estracto PDFmexicano980% (1)
- Planeacion Estretegica de Excel EDAYO 2019Dokument10 SeitenPlaneacion Estretegica de Excel EDAYO 2019Yamir Maximino Garrido VazquezNoch keine Bewertungen
- Ex Recuperacion LFADokument3 SeitenEx Recuperacion LFAJose Fernando Villacorta TafurNoch keine Bewertungen
- Practica de TecladoDokument3 SeitenPractica de TecladoETNA GNoch keine Bewertungen