Das könnte Ihnen auch gefallen
- Cajas de Cambio de Toma DirectaDokument10 SeitenCajas de Cambio de Toma DirectamartemarNoch keine Bewertungen
- Cómo Funciona La Caja de Cambios de Una MotoDokument14 SeitenCómo Funciona La Caja de Cambios de Una MotoAngelica PerezNoch keine Bewertungen
- Purgado Del Circuito de FrenosDokument3 SeitenPurgado Del Circuito de FrenosEdgard LeoNoch keine Bewertungen
- Angulos Geometria de La DireccionDokument9 SeitenAngulos Geometria de La DireccionJohn Pablo Usho RamírezNoch keine Bewertungen
- Tipos de Embragues en MotocicletasDokument3 SeitenTipos de Embragues en MotocicletasGustavo Casas FrancoNoch keine Bewertungen
- Guías de Practicas de Sistema de Suspensión Independiente (MC Pherson)Dokument20 SeitenGuías de Practicas de Sistema de Suspensión Independiente (MC Pherson)vicu100% (1)
- Caja de Cambios SimplificadaDokument15 SeitenCaja de Cambios Simplificadaantony rafael sarmientoNoch keine Bewertungen
- SEMANA N°7 (Funcionamiento de Las Servodirecciones)Dokument23 SeitenSEMANA N°7 (Funcionamiento de Las Servodirecciones)Cristian MonsalvesNoch keine Bewertungen
- Tipos de SuspensionesDokument19 SeitenTipos de SuspensionesEsteban HogganNoch keine Bewertungen
- Caja MecánicaDokument7 SeitenCaja MecánicaOmarcito Tym100% (1)
- Caja de Cambios Simplificada - 8Dokument46 SeitenCaja de Cambios Simplificada - 8Luis CorderoNoch keine Bewertungen
- Ficha Técnica Sensor O2 y Knock SensorDokument7 SeitenFicha Técnica Sensor O2 y Knock SensorHERNAN SANTIAGO ORDONEZ ANANGONONoch keine Bewertungen
- Transmision Manual PDFDokument211 SeitenTransmision Manual PDFNerio MoralesNoch keine Bewertungen
- Preguntas de Motores A GasolinaDokument2 SeitenPreguntas de Motores A GasolinaLuis SilvaNoch keine Bewertungen
- Sistema de FrenosDokument5 SeitenSistema de FrenosCristian GuamánNoch keine Bewertungen
- Silabus de Laboratorio de Motores de Combustion Interna 2018Dokument6 SeitenSilabus de Laboratorio de Motores de Combustion Interna 2018Romeo Minaya MezaNoch keine Bewertungen
- Hoja Operación 06Dokument5 SeitenHoja Operación 06Maricielo Belen Tejeda LizarragaNoch keine Bewertungen
- Clase Culata PDFDokument99 SeitenClase Culata PDFLuisGerardNoch keine Bewertungen
- Botadores HidraulicosDokument7 SeitenBotadores HidraulicosNicolás SantarelliNoch keine Bewertungen
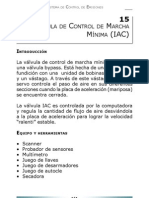
- Valvula Iac - ControlDokument8 SeitenValvula Iac - ControlGian Carlos Levano CanalesNoch keine Bewertungen
- Libro de Embrague y Caja de VelocidadesDokument35 SeitenLibro de Embrague y Caja de VelocidadesEdwin Tec0% (2)
- Inyeccion Electronica YamahaDokument5 SeitenInyeccion Electronica YamahaJandres PerezNoch keine Bewertungen
- Proyecto Soporte Motor de MotoDokument14 SeitenProyecto Soporte Motor de MotoEdgardo David GressNoch keine Bewertungen
- Maniobra de VálvulasDokument3 SeitenManiobra de VálvulasErack SuizoNoch keine Bewertungen
- Cálculo Mec Cajas MecánicasDokument38 SeitenCálculo Mec Cajas MecánicasImirvlad GINoch keine Bewertungen
- Calculos Del Motor de MotoDokument80 SeitenCalculos Del Motor de MotoIlgner Sandoval100% (1)
- Manual para Cambiar Discos Embrague de MotoDokument7 SeitenManual para Cambiar Discos Embrague de MotoDrake Cabrera Antonio100% (1)
- Examen 1 de Ajuste de Motor - Autos-1Dokument2 SeitenExamen 1 de Ajuste de Motor - Autos-1Joe PalmaNoch keine Bewertungen
- Apriete de CulataDokument1 SeiteApriete de Culatawds657Noch keine Bewertungen
- 10 Plan de Mantenimiento Del Sistema de DirecciónDokument7 Seiten10 Plan de Mantenimiento Del Sistema de DirecciónEric TuquerresNoch keine Bewertungen
- Sistemas de EncendidoDokument59 SeitenSistemas de EncendidoRosa GNoch keine Bewertungen
- Frenos de MotocicletaDokument12 SeitenFrenos de MotocicletaNicolas Cristofani82% (17)
- 3 Power PointDokument7 Seiten3 Power PointKamiilo UlloaNoch keine Bewertungen
- Hoja de Trabajo de MotosDokument2 SeitenHoja de Trabajo de Motosrolaaaa100% (2)
- Suspension MultilinkDokument5 SeitenSuspension MultilinkJafet MonroyNoch keine Bewertungen
- Aceite Caja de CambiosDokument17 SeitenAceite Caja de CambiosFernando Daniel Jinez MontesdeocaNoch keine Bewertungen
- Caja de CambiosDokument24 SeitenCaja de CambiosMarco Rodriguez100% (1)
- Funcionamiento de La Caja de Cambios de MotocicletaDokument8 SeitenFuncionamiento de La Caja de Cambios de MotocicletaRaul Quispe RamirezNoch keine Bewertungen
- Ficha Técnica Sensores TPS y AppDokument4 SeitenFicha Técnica Sensores TPS y AppHERNAN SANTIAGO ORDONEZ ANANGONONoch keine Bewertungen
- Vocabulario Tecnico en VehiculosDokument4 SeitenVocabulario Tecnico en VehiculosOscar AcostaNoch keine Bewertungen
- Geometria de Direccion AutomotrizDokument2 SeitenGeometria de Direccion AutomotrizVíctorManuelGarcíaNoch keine Bewertungen
- Guía 8 Limpieza y Armado Del Block Motor, Ciclo Otto.Dokument9 SeitenGuía 8 Limpieza y Armado Del Block Motor, Ciclo Otto.USUARIO1218100% (1)
- Modulo 4Dokument52 SeitenModulo 4celedonio100% (1)
- Angulo AckermanDokument5 SeitenAngulo Ackermansorrento_1317100% (1)
- Sistema de FrenosDokument21 SeitenSistema de FrenosAlejandro MontesNoch keine Bewertungen
- Motor de Arranque PDFDokument13 SeitenMotor de Arranque PDFGael Ortiz100% (2)
- B. Practica de Laboratorio de SISTEMA DE DIRECCIÓNDokument7 SeitenB. Practica de Laboratorio de SISTEMA DE DIRECCIÓNMargaret Villegas Villca100% (1)
- Tipos de Sistemas de DireccionDokument40 SeitenTipos de Sistemas de DireccionJosueNoch keine Bewertungen
- Sistemas de Suspencion AutomotrizDokument94 SeitenSistemas de Suspencion AutomotrizMichael Alejandro Guillen50% (2)
- AlternadorDokument80 SeitenAlternadorramakaruna100% (1)
- Caja de Cambios ManualDokument13 SeitenCaja de Cambios ManualAnabeliza Merchan FariasNoch keine Bewertungen
- Como Poner A Punto Una Leva de Competicion Sin Tener La CartillaDokument3 SeitenComo Poner A Punto Una Leva de Competicion Sin Tener La CartillaSergio GardeazabalNoch keine Bewertungen
- Fundamento Teórico MotoresDokument7 SeitenFundamento Teórico MotoresFranz Marcelo Puente Padilla100% (1)
- Suspension CompletoDokument17 SeitenSuspension CompletoGermanMollesacaNoch keine Bewertungen
- Sistema de SuspensionDokument58 SeitenSistema de SuspensionAurelio Pérez Mendiguri100% (1)
- Suspension Tipos y MarcasDokument35 SeitenSuspension Tipos y MarcasGustavo Vilca MascoNoch keine Bewertungen
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209Von EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Bewertung: 1 von 5 Sternen1/5 (2)
- UF1252 - Elementos amovibles y fijos no estructuralesVon EverandUF1252 - Elementos amovibles y fijos no estructuralesNoch keine Bewertungen
- UF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposVon EverandUF1214 - Mantenimiento de motores térmicos de dos y cuatro tiemposBewertung: 5 von 5 Sternen5/5 (1)
- B.15.ficha Tecnica Serie ViperDokument3 SeitenB.15.ficha Tecnica Serie ViperJorge SatieNoch keine Bewertungen
- Multimetro DigitalDokument4 SeitenMultimetro DigitalJorge OtazuNoch keine Bewertungen
- Modelado y Simulacion - Robot 2 Grados de LibertadDokument7 SeitenModelado y Simulacion - Robot 2 Grados de LibertadLalo FrankNoch keine Bewertungen
- NMX D 122 1973Dokument8 SeitenNMX D 122 1973Victor MercadoNoch keine Bewertungen
- Guia - Practica Intercambiadores de CalorDokument8 SeitenGuia - Practica Intercambiadores de CalorFabian Erazo AvilesNoch keine Bewertungen
- 3.0 EDO SuperiorDokument24 Seiten3.0 EDO Superioringeniero.saban22803Noch keine Bewertungen
- Esfuerzo EfectivoDokument40 SeitenEsfuerzo EfectivoSamuel Marca100% (1)
- Regresión y Correlación LinealDokument6 SeitenRegresión y Correlación LinealManuel GarzaNoch keine Bewertungen
- MC - Aguas Lluvias Rev0Dokument11 SeitenMC - Aguas Lluvias Rev0Jonathan Negrete OrtizNoch keine Bewertungen
- Proceso de MaquinaDokument7 SeitenProceso de MaquinaEverthNoch keine Bewertungen
- Formato Hojas InformeDokument53 SeitenFormato Hojas InformeCamilo Andrés Cárdenas OpazoNoch keine Bewertungen
- Prensa Hidraulica Con Cilindro Movil Aslak Metalkraft WPP 30 Ref. 4001030 0 PDFDokument26 SeitenPrensa Hidraulica Con Cilindro Movil Aslak Metalkraft WPP 30 Ref. 4001030 0 PDFJohan Sebastian Garcia AlvarezNoch keine Bewertungen
- Norma Tecnica Peruana NTP 400Dokument17 SeitenNorma Tecnica Peruana NTP 400Bill ... .Noch keine Bewertungen
- Estudio de Suelos y Calculo de Zapata - FundacionesDokument28 SeitenEstudio de Suelos y Calculo de Zapata - Fundacionesemer2508Noch keine Bewertungen
- Presentacion 3. Propiedades Fisicas Del Gas NaturalDokument85 SeitenPresentacion 3. Propiedades Fisicas Del Gas NaturalAnonymous HJZffHvTNoch keine Bewertungen
- Tecnicas Basicas MicrobiologiaDokument20 SeitenTecnicas Basicas Microbiologiacalidadesptri100% (1)
- Laboratorio de Ingenieria Mecanica III Ventilador Centrifugo PDFDokument28 SeitenLaboratorio de Ingenieria Mecanica III Ventilador Centrifugo PDFEd GonzalesNoch keine Bewertungen
- Apuntes de Programación de La ProducciónDokument61 SeitenApuntes de Programación de La Producciónnmapper100% (1)
- Fisicoquímica InformeDokument8 SeitenFisicoquímica Informeefrain tarazona ramirezNoch keine Bewertungen
- Validacion Tanque Cilindrico Horizontal 30 m3Dokument15 SeitenValidacion Tanque Cilindrico Horizontal 30 m3León Alberto Gallego CampuzanoNoch keine Bewertungen
- Comprobaciones E.L.UDokument4 SeitenComprobaciones E.L.UJorge RoaNoch keine Bewertungen
- ICT Electricidad BasicaDokument25 SeitenICT Electricidad Basica再開 ルイスNoch keine Bewertungen
- ReactividadDokument6 SeitenReactividadHumbertoSalamancaNoch keine Bewertungen
- Plan de Estudios UNP AmbientalDokument1 SeitePlan de Estudios UNP AmbientalSergio Huaman ValdiviaNoch keine Bewertungen
- Memoria Descriptiva Pueblo Libre OkDokument12 SeitenMemoria Descriptiva Pueblo Libre OkAnibal Segura GamboaNoch keine Bewertungen
- Lineas y Planos en El Espacio 3DDokument8 SeitenLineas y Planos en El Espacio 3DLiseth MoralesNoch keine Bewertungen
- 1.7.3.1 Taller Cambio de VariableDokument5 Seiten1.7.3.1 Taller Cambio de VariableNicolás JiménezNoch keine Bewertungen
- Bloque Ii Etapas Desarrollo Evolutivo (7-10 Años) PDFDokument11 SeitenBloque Ii Etapas Desarrollo Evolutivo (7-10 Años) PDFHelen EppNoch keine Bewertungen
- Fase 2 Parte Calculo Mul Aporte Ejercicio 3Dokument4 SeitenFase 2 Parte Calculo Mul Aporte Ejercicio 3Harold Favian Diaz LeonisNoch keine Bewertungen
- Sistema de DiaclasasDokument2 SeitenSistema de DiaclasasPaulCaceresNoch keine Bewertungen