Das könnte Ihnen auch gefallen
- Tp4 Calcul Raideur Rdm6 Optimisation de Structure Logiciel RDM Le ManDokument5 SeitenTp4 Calcul Raideur Rdm6 Optimisation de Structure Logiciel RDM Le ManAmine RdNoch keine Bewertungen
- Element de Barre (MEF)Dokument26 SeitenElement de Barre (MEF)NocifLyes100% (1)
- CH1 - Vibration MécaniqueDokument34 SeitenCH1 - Vibration MécaniqueMouaad Alouani100% (1)
- Mini Projet MEFDokument7 SeitenMini Projet MEFANDAHMOUNoch keine Bewertungen
- Chap - I - II - Int - Calcul IndicielDokument11 SeitenChap - I - II - Int - Calcul Indicielmomo100% (1)
- Chapitre 3 PDFDokument47 SeitenChapitre 3 PDFpdfeNoch keine Bewertungen
- Abaqus Treuil 1Dokument24 SeitenAbaqus Treuil 1Fédia El MabroukNoch keine Bewertungen
- Version Final Rapport Elascticite 2DDokument39 SeitenVersion Final Rapport Elascticite 2DSanaa Ait Ali100% (1)
- Méthode de Résolution Des EDP Et Des Systèmes D'équations Linéaires - Application À L'équation de La Chaleur en 3D - 2Dokument24 SeitenMéthode de Résolution Des EDP Et Des Systèmes D'équations Linéaires - Application À L'équation de La Chaleur en 3D - 2Waly SarrNoch keine Bewertungen
- TD Avec CorrectionDokument4 SeitenTD Avec CorrectionHassene El YassNoch keine Bewertungen
- 11 Exercice 11 COR NEWDokument5 Seiten11 Exercice 11 COR NEWOumayma RkiouakNoch keine Bewertungen
- DS 2013-2014Dokument2 SeitenDS 2013-2014jihenk100% (1)
- Cours MMC-CHAPITRE 4-Equations de ElastostatiqueDokument10 SeitenCours MMC-CHAPITRE 4-Equations de ElastostatiqueAxel BekaertNoch keine Bewertungen
- Utilisation RDM6 2Dokument13 SeitenUtilisation RDM6 2azertyNoch keine Bewertungen
- Cours Vprocess PDFDokument47 SeitenCours Vprocess PDFMohamed LaliouiNoch keine Bewertungen
- Cours MEF Scéance 1&2&3Dokument74 SeitenCours MEF Scéance 1&2&3ANDAHMOU SoulaimanNoch keine Bewertungen
- TP Finale Sur RDM6 RDSDokument2 SeitenTP Finale Sur RDM6 RDSYannick Stephane Nouchi100% (2)
- Meflab V2Dokument7 SeitenMeflab V2Mourad TajNoch keine Bewertungen
- Correction Du DS 2013-2014Dokument5 SeitenCorrection Du DS 2013-2014jihenkNoch keine Bewertungen
- Treillis MEFDokument11 SeitenTreillis MEFraouf100% (2)
- TP Abaqus CompositesDokument13 SeitenTP Abaqus CompositesHamza Liberados100% (1)
- Méthode Des Eléments Finis: Exercice 1Dokument3 SeitenMéthode Des Eléments Finis: Exercice 1abdesslem0jarrayNoch keine Bewertungen
- Exiii 2Dokument3 SeitenExiii 2Art Sceno100% (1)
- TP 2Dokument15 SeitenTP 2SimoZorgane100% (1)
- RDM Formules de BresseDokument17 SeitenRDM Formules de BresseDaoudHamNoch keine Bewertungen
- l3 El Fini Examen 2018-1Dokument5 Seitenl3 El Fini Examen 2018-1Konstantin Plyushchev100% (1)
- TP de MEFDokument17 SeitenTP de MEFlando de chance100% (1)
- Examen Mecanique Des Milieux Continus SMP S6 2014 2015 FSSM PDFDokument2 SeitenExamen Mecanique Des Milieux Continus SMP S6 2014 2015 FSSM PDFazzamNoch keine Bewertungen
- Utt - Rapport Ma13 - Abaqus PDFDokument19 SeitenUtt - Rapport Ma13 - Abaqus PDFLeksir KamiliaNoch keine Bewertungen
- TP VibrationDokument13 SeitenTP VibrationNeoXana01Noch keine Bewertungen
- TD n2 ElasticitéDokument2 SeitenTD n2 Elasticitéaya arij100% (2)
- Cours MMCDokument137 SeitenCours MMCMahfoud ZakiNoch keine Bewertungen
- 11 Exercice 11Dokument2 Seiten11 Exercice 11Oumayma Rkiouak100% (1)
- Chapitre III - Éléments de Contraintes Et de Déformations PlanesDokument45 SeitenChapitre III - Éléments de Contraintes Et de Déformations PlanesHamidNoch keine Bewertungen
- TDMMC 01Dokument7 SeitenTDMMC 01Samir2020Noch keine Bewertungen
- 2-TP Tuto RDM6 FlexionDokument9 Seiten2-TP Tuto RDM6 FlexionPaulHochonNoch keine Bewertungen
- TP MSDDokument13 SeitenTP MSDTA RikNoch keine Bewertungen
- TP Pompe À EngrenageDokument7 SeitenTP Pompe À EngrenageWafa SaidaniNoch keine Bewertungen
- Mef UnstimDokument54 SeitenMef UnstimISAAC SOGLONoch keine Bewertungen
- Calcul de StructuresDokument58 SeitenCalcul de StructuresjoeNoch keine Bewertungen
- Exo Chapitre 3 Loi Comportement Milieux ContinusDokument8 SeitenExo Chapitre 3 Loi Comportement Milieux ContinusDjelloul ReziniNoch keine Bewertungen
- Mecanismes Plans A Quatre Barres Articulees 4Dokument30 SeitenMecanismes Plans A Quatre Barres Articulees 4zouhour brahmiNoch keine Bewertungen
- Embrayage Frein Et ReducteurDokument7 SeitenEmbrayage Frein Et ReducteurOtman OtoNoch keine Bewertungen
- Examens Et TD Corrigés EngrenagesDokument14 SeitenExamens Et TD Corrigés EngrenagesYOUSSEF BOUTIOURENoch keine Bewertungen
- Chapitre 3Dokument47 SeitenChapitre 3AzalNoch keine Bewertungen
- BK - Element PoutreDokument28 SeitenBK - Element Poutreمريم إيمانNoch keine Bewertungen
- CH 3 Poteaux Et VoilesDokument13 SeitenCH 3 Poteaux Et VoilesMoussa Hajjaji100% (1)
- TP1 Poutre - PortiqueDokument11 SeitenTP1 Poutre - PortiqueGustavo Andrés Avellaneda Malagón100% (1)
- Manuel RDM6Dokument22 SeitenManuel RDM6Mohamed Berzouk100% (2)
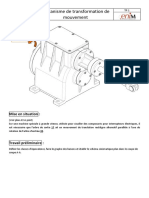
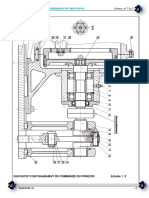
- Sujet - Mécanisme de Transformation de MouvementDokument2 SeitenSujet - Mécanisme de Transformation de Mouvementhaziq ridzuanNoch keine Bewertungen
- Cinématique Des Systèmes - Cinématique Des MécaniquesDokument16 SeitenCinématique Des Systèmes - Cinématique Des Mécaniquessinchicovich100% (3)
- Chap1 5eme AnneeDokument16 SeitenChap1 5eme AnneeEden St CyrNoch keine Bewertungen
- Implémentation Des Éléments Finis en Matlab v5Dokument21 SeitenImplémentation Des Éléments Finis en Matlab v5mm_lyon100% (1)
- Implémentation Des Éléments Finis en Matlab v5Dokument30 SeitenImplémentation Des Éléments Finis en Matlab v5Lam Ch100% (3)
- tp06 Eq-LaplaceDokument6 Seitentp06 Eq-LaplacedonaldmanuhounsaNoch keine Bewertungen
- TD1 RappelsDokument2 SeitenTD1 RappelsAš MäNoch keine Bewertungen
- Public2017 B1Dokument6 SeitenPublic2017 B1Mohamed JamaaNoch keine Bewertungen
- Compte Rendu TP1 Problème de La Plaque 2DDokument41 SeitenCompte Rendu TP1 Problème de La Plaque 2DArt ScenoNoch keine Bewertungen
- Annales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésVon EverandAnnales de Mathématiques, Baccalauréat C et E, Cameroun, 2008 - 2018: Sujets et CorrigésBewertung: 4.5 von 5 Sternen4.5/5 (4)
- A-Saisir Le Besoin: S. Qualité EnquêteDokument1 SeiteA-Saisir Le Besoin: S. Qualité EnquêteMahrez ZaafouriNoch keine Bewertungen
- Présentation: CD3.1: Rédiger Partiellement Un Cahier Des ChargesDokument1 SeitePrésentation: CD3.1: Rédiger Partiellement Un Cahier Des ChargesMahrez ZaafouriNoch keine Bewertungen
- D-Hiérarchisation Des Fonctions de Service: Estime Accordée Par Le Client / Coût D'obtentionDokument1 SeiteD-Hiérarchisation Des Fonctions de Service: Estime Accordée Par Le Client / Coût D'obtentionMahrez ZaafouriNoch keine Bewertungen
- Moteur GX 31: Solid EdgeDokument1 SeiteMoteur GX 31: Solid EdgeMahrez ZaafouriNoch keine Bewertungen
- 3-Recherche Des Solutions Pour Chaque FonctionDokument1 Seite3-Recherche Des Solutions Pour Chaque FonctionMahrez ZaafouriNoch keine Bewertungen
- 12Dokument1 Seite12Mahrez ZaafouriNoch keine Bewertungen
- Bac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 5/8Dokument1 SeiteBac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 5/8Mahrez ZaafouriNoch keine Bewertungen
- Page 1Dokument1 SeitePage 1Mahrez ZaafouriNoch keine Bewertungen
- Document Constructeur Choix RéducteurDokument1 SeiteDocument Constructeur Choix RéducteurMahrez ZaafouriNoch keine Bewertungen
- Bac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 3/8Dokument1 SeiteBac Pro Mei Code: AP 2006-MEI ST 11 1 Session 2020 Dossier Technique Et Ressources E1 Sous-Epreuve E11 Durée: 4 H Coefficient: 3 DTR: 3/8Mahrez ZaafouriNoch keine Bewertungen
- Extrait Du Guide Du Dessinateur IndustrielDokument1 SeiteExtrait Du Guide Du Dessinateur IndustrielMahrez ZaafouriNoch keine Bewertungen
- Page 5Dokument1 SeitePage 5Mahrez ZaafouriNoch keine Bewertungen
- Page 4Dokument1 SeitePage 4Mahrez ZaafouriNoch keine Bewertungen
- Page 3Dokument1 SeitePage 3Mahrez ZaafouriNoch keine Bewertungen
- Page 2Dokument1 SeitePage 2Mahrez ZaafouriNoch keine Bewertungen
- Liaisons Equivalente-4sDokument3 SeitenLiaisons Equivalente-4sMahrez ZaafouriNoch keine Bewertungen
- Liaisons Equivalentes-5Dokument5 SeitenLiaisons Equivalentes-5Mahrez ZaafouriNoch keine Bewertungen
- Liaisons Equivalentes-2Dokument5 SeitenLiaisons Equivalentes-2Mahrez ZaafouriNoch keine Bewertungen
- 4.3.8 Exemple de Contrôle D'Un Assemblage À Clavette: 2 2 2 P GL N GLDokument1 Seite4.3.8 Exemple de Contrôle D'Un Assemblage À Clavette: 2 2 2 P GL N GLMahrez ZaafouriNoch keine Bewertungen
- Liaisons Equivalentes-3Dokument3 SeitenLiaisons Equivalentes-3Mahrez ZaafouriNoch keine Bewertungen
- 2Dokument1 Seite2Mahrez ZaafouriNoch keine Bewertungen
- Iset SBZ TD Matériels de Protection Master MDEADokument1 SeiteIset SBZ TD Matériels de Protection Master MDEAMahrez ZaafouriNoch keine Bewertungen
- Contrôle de La Clavette Parallèle: RemarqueDokument1 SeiteContrôle de La Clavette Parallèle: RemarqueMahrez ZaafouriNoch keine Bewertungen
- Liaisons Equivalentes-1Dokument3 SeitenLiaisons Equivalentes-1Mahrez ZaafouriNoch keine Bewertungen
- 3Dokument1 Seite3Mahrez ZaafouriNoch keine Bewertungen
- 1Dokument1 Seite1Mahrez ZaafouriNoch keine Bewertungen
- SystèmesLinéaires VFDokument105 SeitenSystèmesLinéaires VFSalma LatifiNoch keine Bewertungen
- Pages de Exercices 1 3Dokument1 SeitePages de Exercices 1 3Badreddine EssaidiNoch keine Bewertungen
- Corrigé EX2-3 Série1 MR-AIIDokument32 SeitenCorrigé EX2-3 Série1 MR-AIIKadri MongiNoch keine Bewertungen
- Correction Ro Efb Mai 2014Dokument5 SeitenCorrection Ro Efb Mai 2014Mohamed AssadNoch keine Bewertungen
- Le Pivot de GaussDokument1 SeiteLe Pivot de GaussMalik DhananiNoch keine Bewertungen
- Cours Partie IV Alogorithme Simplexe Minmisation Et DualitéDokument8 SeitenCours Partie IV Alogorithme Simplexe Minmisation Et DualitéMohamed MinoualNoch keine Bewertungen
- Corrige Exam 1 H09Dokument11 SeitenCorrige Exam 1 H09azzamNoch keine Bewertungen
- Programmation Analyse Num Erique: Licence 2 - Maths InfoDokument63 SeitenProgrammation Analyse Num Erique: Licence 2 - Maths InfoDavid SageNoch keine Bewertungen
- Condition D'optimalité (Cours)Dokument8 SeitenCondition D'optimalité (Cours)nihad snNoch keine Bewertungen
- TD 2 Analyse Numérique (B1-TP1) : 1 Méthode D'eulerDokument3 SeitenTD 2 Analyse Numérique (B1-TP1) : 1 Méthode D'eulerWz borNoch keine Bewertungen
- Résoudre Les Équations Du Troisième DegréDokument1 SeiteRésoudre Les Équations Du Troisième Degréoussama houariNoch keine Bewertungen
- Exos DeterminantsDokument3 SeitenExos DeterminantsSalh JerNoch keine Bewertungen
- CH1-4 - Développement de TaylorDokument9 SeitenCH1-4 - Développement de TaylorSouleyman Amadou DialloNoch keine Bewertungen
- Polynomes Info ISIMMDokument10 SeitenPolynomes Info ISIMMRa Nim ghNoch keine Bewertungen
- Examen2 Résistance Des Matériaux 2Dokument6 SeitenExamen2 Résistance Des Matériaux 2ibtihal RNNoch keine Bewertungen
- BE SondeDokument9 SeitenBE SondeFILALI HOUCEMEDDINENoch keine Bewertungen
- Cours2 MEFDokument37 SeitenCours2 MEFYoni AiméNoch keine Bewertungen
- Exercice 1: Série N°3Dokument1 SeiteExercice 1: Série N°3bouzidNoch keine Bewertungen
- Algebre TDDokument39 SeitenAlgebre TDIkounad Yassine100% (1)
- Phy 4027Dokument72 SeitenPhy 4027Rudy MbiadaNoch keine Bewertungen
- Chapitre 06 Techniques D'intégrations Numériques en Éléments FinisDokument26 SeitenChapitre 06 Techniques D'intégrations Numériques en Éléments FinisSamagassi SouleymaneNoch keine Bewertungen
- Cours PythonDokument14 SeitenCours PythonIsmaila BaNoch keine Bewertungen
- Optim L3 M239Dokument92 SeitenOptim L3 M239Serigne GueyeNoch keine Bewertungen
- 02-SystemesLineaires PolyDokument9 Seiten02-SystemesLineaires Polyel hadji malick DioumNoch keine Bewertungen
- 12 - Formulaire Des PoutresDokument4 Seiten12 - Formulaire Des PoutresIsmaëlNoch keine Bewertungen
- DM Fev 2022Dokument3 SeitenDM Fev 2022Mat GuiNoch keine Bewertungen
- Cours 7Dokument40 SeitenCours 7Amine AlaouiNoch keine Bewertungen
- Pres Chap 08 Methodes Minimisation Avec Limitations 16Dokument16 SeitenPres Chap 08 Methodes Minimisation Avec Limitations 16COMPA CABANANoch keine Bewertungen
- Ratrapage Math - Vi 08 - 09Dokument6 SeitenRatrapage Math - Vi 08 - 09Käm ÎlîăNoch keine Bewertungen
- SMA-SMI S4 (Série 2)Dokument2 SeitenSMA-SMI S4 (Série 2)Fatima ZahraNoch keine Bewertungen