Das könnte Ihnen auch gefallen
- Partie II CHAPITREIIDokument20 SeitenPartie II CHAPITREIIBabi BenNoch keine Bewertungen
- Conception D'une Antenne Large Bande, À Haut Gain Et À Polarisation Circulaire.Dokument66 SeitenConception D'une Antenne Large Bande, À Haut Gain Et À Polarisation Circulaire.Babi BenNoch keine Bewertungen
- Chapitre 4suiteDokument13 SeitenChapitre 4suiteBabi BenNoch keine Bewertungen
- Chapitre 2 TVNDokument29 SeitenChapitre 2 TVNkarim amiaNoch keine Bewertungen
- Liste Des Sujets Master 2018 2019 SIGLDokument2 SeitenListe Des Sujets Master 2018 2019 SIGLBabi BenNoch keine Bewertungen
- Chap1 - 2 Technologie Et Protocoles Pour Le MultimédiaDokument70 SeitenChap1 - 2 Technologie Et Protocoles Pour Le MultimédiaBabi BenNoch keine Bewertungen
- Notes Sur Les SolutionsDokument4 SeitenNotes Sur Les SolutionsBabi BenNoch keine Bewertungen
- Chapitre 05Dokument3 SeitenChapitre 05Babi BenNoch keine Bewertungen
- Chapitre 04Dokument3 SeitenChapitre 04Babi BenNoch keine Bewertungen
- Chapitre 01Dokument4 SeitenChapitre 01Babi BenNoch keine Bewertungen
- Chapitre 02Dokument4 SeitenChapitre 02Babi BenNoch keine Bewertungen
- Rattrapage TI 2017Dokument2 SeitenRattrapage TI 2017Babi BenNoch keine Bewertungen
- Chapitre 03Dokument3 SeitenChapitre 03Babi BenNoch keine Bewertungen
- Tp2 POO en C++Dokument3 SeitenTp2 POO en C++Babi BenNoch keine Bewertungen
- Communications OptiquesDokument2 SeitenCommunications OptiquesBabi BenNoch keine Bewertungen
- Slides Cours 4G LTE - NBDokument28 SeitenSlides Cours 4G LTE - NBBabi BenNoch keine Bewertungen
- Corrige 1Dokument15 SeitenCorrige 1hatemNoch keine Bewertungen
- Solution Examen LAT315 2017Dokument3 SeitenSolution Examen LAT315 2017Babi Ben80% (5)
- L3 ELN Projet Et GestionDokument1 SeiteL3 ELN Projet Et GestionBabi BenNoch keine Bewertungen
- Le Problème Du Consensus Dans Les Réseaux Mobiles Ad Hoc PDFDokument78 SeitenLe Problème Du Consensus Dans Les Réseaux Mobiles Ad Hoc PDFBabi BenNoch keine Bewertungen
- Cloud Computing Application Aux Systèmes Mobiles Et Pair A PairDokument51 SeitenCloud Computing Application Aux Systèmes Mobiles Et Pair A PairBabi BenNoch keine Bewertungen
- Optoélectronique Sujet 1Dokument1 SeiteOptoélectronique Sujet 1Babi BenNoch keine Bewertungen
- Chapitre 03Dokument3 SeitenChapitre 03Babi BenNoch keine Bewertungen
- Corrige Examen Fpga 2012 2013Dokument6 SeitenCorrige Examen Fpga 2012 2013amidi5555913100% (2)
- Introduction Aux ImagesDokument4 SeitenIntroduction Aux ImagesBabi BenNoch keine Bewertungen
- Traitement D'image CoursDokument6 SeitenTraitement D'image CoursBabi BenNoch keine Bewertungen
- TZ Sous MatlabDokument7 SeitenTZ Sous MatlabBabi BenNoch keine Bewertungen
- Réseaux SatellitairesDokument9 SeitenRéseaux SatellitairesBabi BenNoch keine Bewertungen
- Process AciérieDokument6 SeitenProcess Aciériesanae jaouiNoch keine Bewertungen
- Introduction À La RobotiqueDokument19 SeitenIntroduction À La RobotiqueRazzougui SarahNoch keine Bewertungen
- Les Étapes de Formation Des Roches SédimentaireDokument2 SeitenLes Étapes de Formation Des Roches Sédimentairehamada2002100% (1)
- RSE & EthiqueDokument6 SeitenRSE & Ethiquealemor2369Noch keine Bewertungen
- TFE Gustave KISHATU MWAMBA Version Finale-1Dokument112 SeitenTFE Gustave KISHATU MWAMBA Version Finale-1gustave kishatu100% (2)
- Tube VentouriDokument10 SeitenTube VentouriMohammed BoulbairNoch keine Bewertungen
- ALIZE LCPC MU v1.5 FR PDFDokument116 SeitenALIZE LCPC MU v1.5 FR PDFSoumana Abdou100% (1)
- Racines Carrees BaseDokument8 SeitenRacines Carrees Basejulien9562Noch keine Bewertungen
- Memoire Inj Messaoud BENZOUAIDokument168 SeitenMemoire Inj Messaoud BENZOUAIManong ShegueyNoch keine Bewertungen
- Arval - Cofrastra 40Dokument16 SeitenArval - Cofrastra 40helder.fradeNoch keine Bewertungen
- Mesure de Compression Moteur Vers FinaleDokument46 SeitenMesure de Compression Moteur Vers FinaleRaouf HarzallahNoch keine Bewertungen
- Calendrier Des Examens Semestre Impair Janvier 2022 AlphaDokument28 SeitenCalendrier Des Examens Semestre Impair Janvier 2022 AlphaMeg JustMegNoch keine Bewertungen
- Prise en Main de Microsoft Office Excel 2016Dokument713 SeitenPrise en Main de Microsoft Office Excel 2016max80% (5)
- Chapitre 1 LES OUTILS MATHEMATIQUESDokument9 SeitenChapitre 1 LES OUTILS MATHEMATIQUESa.ddNoch keine Bewertungen
- PV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRDokument2 SeitenPV Liste-De-Prix Onduleurs HUAWEI 11-2023 FRkoumbounisdimNoch keine Bewertungen
- TP2Dokument4 SeitenTP2Youssef Don RajawiNoch keine Bewertungen
- Canalisations de Gaz NaturelDokument120 SeitenCanalisations de Gaz NaturelJean-David DelordNoch keine Bewertungen
- Correction DevoirDeSyntheseN3 1AS 2009 FinDokument8 SeitenCorrection DevoirDeSyntheseN3 1AS 2009 FinMehdi Ben Arif67% (3)
- 3 Partie Caractéristiques Des LubrifiantDokument32 Seiten3 Partie Caractéristiques Des Lubrifiantsamir belamriNoch keine Bewertungen
- Observatoire National de La Filiere Riz Du Burkina Faso (Onriz)Dokument6 SeitenObservatoire National de La Filiere Riz Du Burkina Faso (Onriz)toni_yousf2418Noch keine Bewertungen
- Format Eur FrancaiseDokument1 SeiteFormat Eur FrancaiseAdnan NandaNoch keine Bewertungen
- Thèse Data IntegrityDokument83 SeitenThèse Data IntegrityBasma YagoubiNoch keine Bewertungen
- 2nd - Exercices Corrigés - Variations D'une FonctDokument1 Seite2nd - Exercices Corrigés - Variations D'une Fonctalyahmed610Noch keine Bewertungen
- The Cuban Missile CrisisDokument8 SeitenThe Cuban Missile Crisismilan.bodis523Noch keine Bewertungen
- Observons:: Nature Du Complément Circonstanciel de TempsDokument2 SeitenObservons:: Nature Du Complément Circonstanciel de TempsMehdi YMNoch keine Bewertungen
- Depliant ELM MasterDokument3 SeitenDepliant ELM MasterYazid AbouchihabeddineNoch keine Bewertungen
- Analyse D'une Situation de Communication en TaDokument2 SeitenAnalyse D'une Situation de Communication en Taroger martin bassong batiigNoch keine Bewertungen
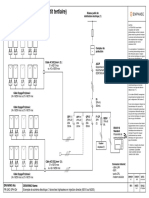
- 3 Branches Triphasées en Injection Directe M215 Ou M250Dokument1 Seite3 Branches Triphasées en Injection Directe M215 Ou M250MbgardNoch keine Bewertungen
- AnnexeDokument168 SeitenAnnexeMoez AliNoch keine Bewertungen
- Cahier D Exercices Ile Aux Mots 8hDokument88 SeitenCahier D Exercices Ile Aux Mots 8hCizNoch keine Bewertungen
- Technologie automobile: Les Grands Articles d'UniversalisVon EverandTechnologie automobile: Les Grands Articles d'UniversalisNoch keine Bewertungen
- Dark Python : Apprenez à créer vos outils de hacking.Von EverandDark Python : Apprenez à créer vos outils de hacking.Bewertung: 3 von 5 Sternen3/5 (1)
- Le trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsVon EverandLe trading en ligne facile à apprendre: Comment devenir un trader en ligne et apprendre à investir avec succèsBewertung: 3.5 von 5 Sternen3.5/5 (19)
- Neuropsychologie: Les bases théoriques et pratiques du domaine d'étude (psychologie pour tous)Von EverandNeuropsychologie: Les bases théoriques et pratiques du domaine d'étude (psychologie pour tous)Noch keine Bewertungen
- Le livre de la mémoire libérée : Apprenez plus vite, retenez tout avec des techniques de mémorisation simples et puissantesVon EverandLe livre de la mémoire libérée : Apprenez plus vite, retenez tout avec des techniques de mémorisation simples et puissantesBewertung: 4 von 5 Sternen4/5 (6)
- Hypnotisme et Magnétisme, Somnambulisme, Suggestion et Télépathie, Influence personnelle: Cours Pratique completVon EverandHypnotisme et Magnétisme, Somnambulisme, Suggestion et Télépathie, Influence personnelle: Cours Pratique completBewertung: 4.5 von 5 Sternen4.5/5 (8)
- L'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Von EverandL'analyse technique facile à apprendre: Comment construire et interpréter des graphiques d'analyse technique pour améliorer votre activité de trading en ligne.Bewertung: 3.5 von 5 Sternen3.5/5 (6)
- Comment développer l’autodiscipline: Résiste aux tentations et atteins tes objectifs à long termeVon EverandComment développer l’autodiscipline: Résiste aux tentations et atteins tes objectifs à long termeBewertung: 4.5 von 5 Sternen4.5/5 (7)
- Secrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieVon EverandSecrets ancestraux d'un maître guérisseur: Un sceptique occidental, un maître oriental et les plus grands secrets de la vieBewertung: 5 von 5 Sternen5/5 (2)
- Aimez-Vous en 12 Étapes Pratiques: Un Manuel pour Améliorer l'Estime de Soi, Prendre Conscience de sa Valeur, se Débarrasser du Doute et Trouver un Bonheur VéritableVon EverandAimez-Vous en 12 Étapes Pratiques: Un Manuel pour Améliorer l'Estime de Soi, Prendre Conscience de sa Valeur, se Débarrasser du Doute et Trouver un Bonheur VéritableBewertung: 5 von 5 Sternen5/5 (4)
- Secrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Von EverandSecrets du Marketing des Médias Sociaux 2021: Conseils et Stratégies Extrêmement Efficaces votre Facebook (Stimulez votre Engagement et Gagnez des Clients Fidèles)Bewertung: 4 von 5 Sternen4/5 (2)
- Introduction à la psychologie des émotions: De Darwin aux neurosciences: découvrir les émotions et leur mode de fonctionnementVon EverandIntroduction à la psychologie des émotions: De Darwin aux neurosciences: découvrir les émotions et leur mode de fonctionnementNoch keine Bewertungen
- Apprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationVon EverandApprendre Python rapidement: Le guide du débutant pour apprendre tout ce que vous devez savoir sur Python, même si vous êtes nouveau dans la programmationNoch keine Bewertungen
- Wireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Von EverandWireshark pour les débutants : Le guide ultime du débutant pour apprendre les bases de l’analyse réseau avec Wireshark.Noch keine Bewertungen
- Force Mentale et Maîtrise de la Discipline: Renforcez votre Confiance en vous pour Débloquer votre Courage et votre Résilience ! (Comprend un Manuel Pratique en 10 Étapes et 15 Puissants Exercices)Von EverandForce Mentale et Maîtrise de la Discipline: Renforcez votre Confiance en vous pour Débloquer votre Courage et votre Résilience ! (Comprend un Manuel Pratique en 10 Étapes et 15 Puissants Exercices)Bewertung: 4.5 von 5 Sternen4.5/5 (28)
- La vie des abeilles: Prix Nobel de littératureVon EverandLa vie des abeilles: Prix Nobel de littératureBewertung: 4 von 5 Sternen4/5 (41)
- Réfléchissez et devenez riche: Le grand livre de l’esprit maîtreVon EverandRéfléchissez et devenez riche: Le grand livre de l’esprit maîtreBewertung: 4 von 5 Sternen4/5 (509)
- Wi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserVon EverandWi-Fi Hacking avec kali linux Guide étape par étape : apprenez à pénétrer les réseaux Wifi et les meilleures stratégies pour les sécuriserNoch keine Bewertungen
- Semer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeVon EverandSemer avec succès pour rassembler avec abundance. Jardin organique et synergique: Calcul des meilleurs jours pour l'ensemencement de chaque légumeNoch keine Bewertungen
- Guide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxVon EverandGuide Pour Les Débutants En Matière De Piratage Informatique: Comment Pirater Un Réseau Sans Fil, Sécurité De Base Et Test De Pénétration, Kali LinuxBewertung: 1 von 5 Sternen1/5 (1)
- Géobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainVon EverandGéobiologie de l'habitat et Géobiologie sacrée: Pour un lieu sainBewertung: 4.5 von 5 Sternen4.5/5 (2)
- L'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésVon EverandL'analyse fondamentale facile à apprendre: Le guide d'introduction aux techniques et stratégies d'analyse fondamentale pour anticiper les événements qui font bouger les marchésBewertung: 3.5 von 5 Sternen3.5/5 (4)
- L'Interprétation des rêves de Sigmund Freud: Les Fiches de lecture d'UniversalisVon EverandL'Interprétation des rêves de Sigmund Freud: Les Fiches de lecture d'UniversalisNoch keine Bewertungen
- Python | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationVon EverandPython | Programmer pas à pas: Le guide du débutant pour une initiation simple & rapide à la programmationNoch keine Bewertungen
- Hacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxVon EverandHacking pour débutants : Le guide complet du débutant pour apprendre les bases du hacking avec Kali LinuxBewertung: 4.5 von 5 Sternen4.5/5 (4)
- Le guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxVon EverandLe guide du hacker : le guide simplifié du débutant pour apprendre les bases du hacking avec Kali LinuxBewertung: 5 von 5 Sternen5/5 (2)