Das könnte Ihnen auch gefallen
- Thinkpad ManualDokument5 SeitenThinkpad ManualytdndjdtNoch keine Bewertungen
- CQ Amateur Radio - November 2021Dokument116 SeitenCQ Amateur Radio - November 2021SergioMarcosMarascaNoch keine Bewertungen
- Instrumentation and Test Gear Circuits ManualVon EverandInstrumentation and Test Gear Circuits ManualBewertung: 5 von 5 Sternen5/5 (1)
- Nuts & Volts 25-01 - Jan 2004Dokument108 SeitenNuts & Volts 25-01 - Jan 2004blahblahname100% (2)
- Enigma (Film) ScriptDokument42 SeitenEnigma (Film) ScriptBeautifullyTragicOzi100% (1)
- GOC GMDSS 60 QuestionsDokument25 SeitenGOC GMDSS 60 QuestionsChristopher MalliaNoch keine Bewertungen
- Arduino Uno Rev 3Dokument4 SeitenArduino Uno Rev 3Joan Perez PerezNoch keine Bewertungen
- Woodworking Bits CatalogueDokument64 SeitenWoodworking Bits CatalogueAnonymous JoB5ZxgNoch keine Bewertungen
- ERTMSDokument8 SeitenERTMSAnjali DSuzaNoch keine Bewertungen
- Aeronautical Ground Stations: Restricted Radio Operator Certificate (Rroc) ReviewerDokument5 SeitenAeronautical Ground Stations: Restricted Radio Operator Certificate (Rroc) ReviewerJohn Iz Mah Neym67% (3)
- 41200cmanual MacrochipDokument36 Seiten41200cmanual MacrochipDarilho Batista Ignacio100% (1)
- Capacitor Meter AutoRanging OLED 128x32 KTW Updated Code 05feb2021Dokument2 SeitenCapacitor Meter AutoRanging OLED 128x32 KTW Updated Code 05feb20214NM20EE085 VISHWAKEERTHI BHAT M100% (1)
- Slave Mains On-Off Control: Amplificationj Attenuation SelectorDokument3 SeitenSlave Mains On-Off Control: Amplificationj Attenuation SelectorTariq Zuhluf100% (2)
- Features Description: LT119A/LT319A LM119/LM319 Dual ComparatorDokument12 SeitenFeatures Description: LT119A/LT319A LM119/LM319 Dual ComparatorMunish Kumar100% (1)
- Indicador Temperatura 16f84a - Schematic Diagram - PROTEUS - GchgelectronicaDokument1 SeiteIndicador Temperatura 16f84a - Schematic Diagram - PROTEUS - GchgelectronicaAlexander Valencia100% (1)
- Indikator PregrijavanjDokument1 SeiteIndikator PregrijavanjTihomir Habdija100% (1)
- Voltage Tester For Model Batteries: Small CircuitscollectionDokument2 SeitenVoltage Tester For Model Batteries: Small CircuitscollectionTariq Zuhluf100% (1)
- TOP269 An47 PDFDokument30 SeitenTOP269 An47 PDFajoaomv100% (1)
- Schematic PrintsDokument1 SeiteSchematic PrintsLe Hieu100% (1)
- TNY264PNDokument6 SeitenTNY264PNJose Benavides100% (1)
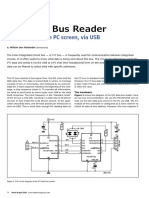
- Lector de Bus de Datos IÂ CDokument4 SeitenLector de Bus de Datos IÂ CGiancarloRichardRivadeneyraMiranda100% (1)
- How To Implement Icsp™ Using Pic16F8X Flash Mcus: Author: Rodger Richey Microchip Technology IncDokument8 SeitenHow To Implement Icsp™ Using Pic16F8X Flash Mcus: Author: Rodger Richey Microchip Technology Incadil100% (1)
- I/P1 - +VE I/P1 - VE VCC SIG GND: TitleDokument1 SeiteI/P1 - +VE I/P1 - VE VCC SIG GND: TitleHEXTEK INSTRUMENTS100% (1)
- Battert MainDokument1 SeiteBattert Mainapi-3730505100% (1)
- Thermostat PCBDokument5 SeitenThermostat PCBalin33100% (1)
- LCD v2017 2 DAC R2R PDFDokument1 SeiteLCD v2017 2 DAC R2R PDFjorge ernesto100% (1)
- SCH Gpsspeed 00 Rev 00Dokument1 SeiteSCH Gpsspeed 00 Rev 00api-649428396100% (1)
- SHC Uart Sac24100Dokument2 SeitenSHC Uart Sac24100bui thuy100% (1)
- Dummy Load SCHDokument1 SeiteDummy Load SCHRemiFlores100% (1)
- Up & Down CounterDokument3 SeitenUp & Down Counteraudio video100% (1)
- Current Probe: Parts ListDokument1 SeiteCurrent Probe: Parts ListTariq Zuhluf100% (2)
- Universal Power-On Delay: by J. RuffellDokument1 SeiteUniversal Power-On Delay: by J. RuffellTariq Zuhluf100% (2)
- EK2-0705B (Gyro Board - Updated) .v1.0Dokument1 SeiteEK2-0705B (Gyro Board - Updated) .v1.0hazen100% (1)
- E 01 CH 02Dokument2 SeitenE 01 CH 02Tariq Zuhluf100% (1)
- Sim8900-Evb V1.03 DL (160324)Dokument8 SeitenSim8900-Evb V1.03 DL (160324)Bhagath Ch100% (1)
- Captivate Development Kit: Processor PCB To Panel PCB Connector Haptic Drive CircuitDokument2 SeitenCaptivate Development Kit: Processor PCB To Panel PCB Connector Haptic Drive CircuitPankaj Rupani100% (3)
- Schematics 2 CH Suhu DS1820 Lm35 PDFDokument1 SeiteSchematics 2 CH Suhu DS1820 Lm35 PDFImanuel100% (1)
- USB3300 USB HS Board SchematicDokument1 SeiteUSB3300 USB HS Board Schematicvm anon100% (2)
- GiovanniDokument1 SeiteGiovanniGiovanni Coaquira100% (1)
- A Usb Rev 1 - 00Dokument1 SeiteA Usb Rev 1 - 00jceletronic100% (2)
- The Basics of Ethernet The Basics of Ethernet The Basics of Ethernet The Basics of EthernetDokument6 SeitenThe Basics of Ethernet The Basics of Ethernet The Basics of Ethernet The Basics of EthernetRupesh Kumar100% (1)
- Ethernet AdaptorDokument3 SeitenEthernet Adaptormohammadyou100% (2)
- Extending The SPI Bus For Long Distnce CommDokument7 SeitenExtending The SPI Bus For Long Distnce CommFelipe Ademir Aleman Hdez100% (2)
- Uart Ip Core Specification: Systemverilog VersionDokument20 SeitenUart Ip Core Specification: Systemverilog VersionSujay M100% (1)
- Schematic PrintsDokument1 SeiteSchematic PrintsWeb Devils100% (3)
- LM386 Schematic Diagram PDFDokument2 SeitenLM386 Schematic Diagram PDFmorcov19100% (1)
- ESQUEMADokument1 SeiteESQUEMAByron100% (1)
- Schematic PrintsDokument2 SeitenSchematic PrintsYusuf Güngör100% (1)
- Practical Neural Networks (3) : Part 3 - Feedback Nets and Competitive NetsDokument5 SeitenPractical Neural Networks (3) : Part 3 - Feedback Nets and Competitive NetsTariq Zuhluf100% (2)
- Lv-Maxsonar - Ez™ Series: High Performance Sonar Range FinderDokument11 SeitenLv-Maxsonar - Ez™ Series: High Performance Sonar Range FinderBubaka Abu Naufal100% (2)
- Ethernet ATmega32/644 ExperimentierboardDokument9 SeitenEthernet ATmega32/644 ExperimentierboardManit100% (3)
- Rs 232Dokument1 SeiteRs 232Kaustubh Nihul100% (1)
- Design Ideas: Keyboard CircuitDokument2 SeitenDesign Ideas: Keyboard CircuitTariq Zuhluf100% (3)
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDokument27 SeitenAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- Uart Ip Core Specification: Systemverilog VersionDokument20 SeitenUart Ip Core Specification: Systemverilog VersionVamsi Chakradhar100% (2)
- DIY Electronics (HK) LTD PO Box 88458, Sham Shui Po, Hong KongDokument17 SeitenDIY Electronics (HK) LTD PO Box 88458, Sham Shui Po, Hong Kongrajudp100% (1)
- Usbasp: Marius Schäfer (Mschaefer@Mimamau - De)Dokument1 SeiteUsbasp: Marius Schäfer (Mschaefer@Mimamau - De)Nagesh Kolte100% (2)
- Interfacing LCD To Arduino Display Text and Characters On LCD Screen Using ArduinoDokument9 SeitenInterfacing LCD To Arduino Display Text and Characters On LCD Screen Using ArduinoThomaselva100% (1)
- Trans Prot CirDokument1 SeiteTrans Prot Cirmpkkbtech100% (1)
- Pin ModeDokument3 SeitenPin ModeKrishanu Modak100% (1)
- Addressing Mode: Mohd. Yamani Idris/ Noorzaily Mohamed NoorDokument28 SeitenAddressing Mode: Mohd. Yamani Idris/ Noorzaily Mohamed NoorJoisar100% (1)
- Dlc5 SchematicDokument1 SeiteDlc5 Schematicbahman100% (3)
- ESP32 Module Power Supply: PIQ101 PIQ101Dokument1 SeiteESP32 Module Power Supply: PIQ101 PIQ101Section Maintenance LP-Blériot100% (1)
- LCD Code For AvrDokument4 SeitenLCD Code For AvrAadhya Suman100% (1)
- PDF Edne Sept 2013Dokument52 SeitenPDF Edne Sept 2013torinomg100% (1)
- MC 869 PrincipalDokument1 SeiteMC 869 Principalapi-3711045100% (2)
- Intro To UartsDokument23 SeitenIntro To UartsSainadh Yerrapragada100% (1)
- Schematic1 - Page1Dokument1 SeiteSchematic1 - Page1VânSơn100% (2)
- Tone Ringer Interface: DescriptionDokument6 SeitenTone Ringer Interface: DescriptionVasilij PupkinNoch keine Bewertungen
- 3D Printing With TPU MaterialDokument2 Seiten3D Printing With TPU MaterialAnonymous JoB5ZxgNoch keine Bewertungen
- COUNT Command PICAXEDokument2 SeitenCOUNT Command PICAXEAnonymous JoB5ZxgNoch keine Bewertungen
- Digital Millivoltmeter With ICL7107 Converter: Package ContainsDokument2 SeitenDigital Millivoltmeter With ICL7107 Converter: Package ContainsAnonymous JoB5ZxgNoch keine Bewertungen
- Bass Line ManualDokument20 SeitenBass Line ManualAnonymous JoB5Zxg100% (1)
- MAKE Magazine Vol 35 - Arduino SynthesisDokument8 SeitenMAKE Magazine Vol 35 - Arduino SynthesisAnonymous JoB5ZxgNoch keine Bewertungen
- Duran Duran - A Perfect Day (Akordy A Text)Dokument1 SeiteDuran Duran - A Perfect Day (Akordy A Text)Anonymous JoB5ZxgNoch keine Bewertungen
- MC14538B Dual Precision Retriggerable/Resettable Monostable MultivibratorDokument13 SeitenMC14538B Dual Precision Retriggerable/Resettable Monostable MultivibratorAnonymous JoB5ZxgNoch keine Bewertungen
- PE09 - 2016 - Jednoduche KomboDokument3 SeitenPE09 - 2016 - Jednoduche KomboAnonymous JoB5Zxg100% (2)
- DS18B20Dokument20 SeitenDS18B20mejmakNoch keine Bewertungen
- ElectronicsForYou201301 - Cellphone Remote ControlDokument2 SeitenElectronicsForYou201301 - Cellphone Remote ControlAnonymous JoB5ZxgNoch keine Bewertungen
- 3D Tlaciaren VERTEX DatasheetDokument1 Seite3D Tlaciaren VERTEX DatasheetAnonymous JoB5ZxgNoch keine Bewertungen
- Pe09 - 2016 - RfidDokument5 SeitenPe09 - 2016 - RfidAnonymous JoB5Zxg100% (2)
- ElectronicsForYou201401 Rotation CounterDokument2 SeitenElectronicsForYou201401 Rotation CounterAnonymous JoB5ZxgNoch keine Bewertungen
- Make Magazine Vol 33 - AbacusDokument2 SeitenMake Magazine Vol 33 - AbacusAnonymous JoB5ZxgNoch keine Bewertungen
- MAKE Magazine Vol 45 - Really Really RandomDokument4 SeitenMAKE Magazine Vol 45 - Really Really RandomAnonymous JoB5ZxgNoch keine Bewertungen
- ElectronicsForYou201301 - RF Signal DetectorDokument2 SeitenElectronicsForYou201301 - RF Signal DetectorAnonymous JoB5ZxgNoch keine Bewertungen
- ElectronicsForYou201302 - 5V Power Supply With TL431Dokument1 SeiteElectronicsForYou201302 - 5V Power Supply With TL431Anonymous JoB5Zxg50% (2)
- LM 2907Dokument22 SeitenLM 2907Alejandro OleasNoch keine Bewertungen
- ElectronicsForYou201310 Visitor CounterDokument2 SeitenElectronicsForYou201310 Visitor CounterAnonymous JoB5Zxg100% (1)
- ElectronicsForYou201304 RF RobotDokument3 SeitenElectronicsForYou201304 RF RobotAnonymous JoB5Zxg100% (1)
- ElectronicsForYou201401 Rotation CounterDokument2 SeitenElectronicsForYou201401 Rotation CounterAnonymous JoB5ZxgNoch keine Bewertungen
- MT8870 Schematic DiagramDokument1 SeiteMT8870 Schematic DiagramAnonymous JoB5Zxg100% (1)
- ElectronicsForYou201401 Rotation CounterDokument2 SeitenElectronicsForYou201401 Rotation CounterAnonymous JoB5ZxgNoch keine Bewertungen
- Humidity Indicator and Controller: Test PointsDokument2 SeitenHumidity Indicator and Controller: Test PointsAnonymous JoB5Zxg100% (1)
- Microsd Click Manual v100bDokument2 SeitenMicrosd Click Manual v100bAnonymous JoB5Zxg100% (2)
- MUSRF05 Data SheetDokument6 SeitenMUSRF05 Data SheetAnonymous JoB5ZxgNoch keine Bewertungen
- ANT AQU4518R8v07 1444 002Dokument2 SeitenANT AQU4518R8v07 1444 002павел100% (1)
- SD Blocking: What Is A Dropped Call?Dokument3 SeitenSD Blocking: What Is A Dropped Call?hamurtuzaNoch keine Bewertungen
- 9221 Ijasa 01Dokument6 Seiten9221 Ijasa 01NAZMUL HASANNoch keine Bewertungen
- Airworthiness Directive: Design Approval Holder's Name: Type/Model Designation(s)Dokument5 SeitenAirworthiness Directive: Design Approval Holder's Name: Type/Model Designation(s)Machita StefanNoch keine Bewertungen
- 2In1Out Hybrid Datasheet-En 20170427Dokument1 Seite2In1Out Hybrid Datasheet-En 20170427Сергей МирошниченкоNoch keine Bewertungen
- Service Manual: HCD-GNX700/GNX800Dokument86 SeitenService Manual: HCD-GNX700/GNX800Albert GTNoch keine Bewertungen
- EGSS - StanstedDokument56 SeitenEGSS - StanstedSpirited WarriorNoch keine Bewertungen
- RS 20-043 Discone AntennaDokument4 SeitenRS 20-043 Discone AntennaBenjamin DoverNoch keine Bewertungen
- Quarter 1-Week 1 Lesson 1 - Day 3 Topic: Sound of Mechanical Sounds (Machine / Transportation)Dokument7 SeitenQuarter 1-Week 1 Lesson 1 - Day 3 Topic: Sound of Mechanical Sounds (Machine / Transportation)Cy DacerNoch keine Bewertungen
- Alokasi IP Rollout JPP 2021-11-10Dokument99 SeitenAlokasi IP Rollout JPP 2021-11-10Ary KurniawanNoch keine Bewertungen
- User Manual VL3R-0111Dokument11 SeitenUser Manual VL3R-0111Abdelrahman IsmailNoch keine Bewertungen
- Dr. HENG, Chun Huat Teaching Assistant Dr. BA MyintDokument7 SeitenDr. HENG, Chun Huat Teaching Assistant Dr. BA MyintNixNoch keine Bewertungen
- SonarDokument19 SeitenSonarAyesha MariyaNoch keine Bewertungen
- Ground Penetrating Radar (GPR) : Basic PrincipleDokument3 SeitenGround Penetrating Radar (GPR) : Basic Principlebella_dsNoch keine Bewertungen
- DS CDPTX04S-RDokument1 SeiteDS CDPTX04S-RLa HanNoch keine Bewertungen
- Class C AmplifierDokument14 SeitenClass C AmplifierSuresh Kumar SubbiahNoch keine Bewertungen
- Communications Formula SheetDokument1 SeiteCommunications Formula SheetNoOne OfNoteNoch keine Bewertungen
- Rosa Spec Fica ION: Page 1 of 2 Effect Ve Fro Ev 1 0Dokument23 SeitenRosa Spec Fica ION: Page 1 of 2 Effect Ve Fro Ev 1 0ManognaNoch keine Bewertungen
- ZG AdDokument4 SeitenZG AdAuyuNoch keine Bewertungen
- Unit 2 Module 2Dokument2 SeitenUnit 2 Module 2heide100% (1)
- Telephone - WikipediaDokument15 SeitenTelephone - WikipediaTejas HankareNoch keine Bewertungen
- Satellite U300/U305: Series User's GuideDokument231 SeitenSatellite U300/U305: Series User's GuidejeffcanNoch keine Bewertungen
- Trimble TDL450L 450H UserGuideDokument32 SeitenTrimble TDL450L 450H UserGuideLuthfi Masychon SofwanNoch keine Bewertungen
- MK 441/15 SEP/PER-MRU: - Not For Real World NavigationDokument47 SeitenMK 441/15 SEP/PER-MRU: - Not For Real World NavigationBertrand ClxNoch keine Bewertungen