Das könnte Ihnen auch gefallen
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- Chapter - 1 - Power System StructureDokument8 SeitenChapter - 1 - Power System StructureMerera TaresaNoch keine Bewertungen
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetVon EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNoch keine Bewertungen
- Ieee Upfc ControlDokument6 SeitenIeee Upfc ControlChaibHabibNoch keine Bewertungen
- Practical Troubleshooting of Electrical Equipment and Control CircuitsVon EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsBewertung: 4 von 5 Sternen4/5 (5)
- Calidad de La Energia ElectricaDokument6 SeitenCalidad de La Energia ElectricaCarlos CapillaNoch keine Bewertungen
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorVon EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNoch keine Bewertungen
- Pole-Placement Designs of Power System StabilizersDokument7 SeitenPole-Placement Designs of Power System StabilizersabelcatayNoch keine Bewertungen
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNoch keine Bewertungen
- CP 2016 1311Dokument8 SeitenCP 2016 1311Asad HameedNoch keine Bewertungen
- Load Frequency Control of Hydro-Thermal System With Fuzzy Logic Controller Considering Boiler DynamicsDokument5 SeitenLoad Frequency Control of Hydro-Thermal System With Fuzzy Logic Controller Considering Boiler DynamicsSudhir KumarNoch keine Bewertungen
- PSOC PART A & B AnsDokument94 SeitenPSOC PART A & B AnsDhivya BNoch keine Bewertungen
- Field Test Process After Commissioning A New Exciter SystemDokument7 SeitenField Test Process After Commissioning A New Exciter SystemvanitaNoch keine Bewertungen
- Unified Power Quality Conditioner in A Grid Connected Photovoltaic SystemDokument11 SeitenUnified Power Quality Conditioner in A Grid Connected Photovoltaic SystemPaolo ProspNoch keine Bewertungen
- Controller A: ConceptDokument9 SeitenController A: ConceptLinda Carolina VasconezNoch keine Bewertungen
- An Optimized Fast Voltage Stability Indicator: C. A. Belhadj M. A. AbidoDokument5 SeitenAn Optimized Fast Voltage Stability Indicator: C. A. Belhadj M. A. Abidomfarouk1Noch keine Bewertungen
- Na Flow Ntroller: PowerDokument7 SeitenNa Flow Ntroller: PowerChristos ApostolopoulosNoch keine Bewertungen
- Reactive Power Compensation Technologies PDFDokument21 SeitenReactive Power Compensation Technologies PDFTovar ArmandoNoch keine Bewertungen
- Project No.3: Mapùa UniversityDokument13 SeitenProject No.3: Mapùa UniversityRick AlvientoNoch keine Bewertungen
- Reactive Power Compensation Technologies: State-of-the-Art ReviewDokument21 SeitenReactive Power Compensation Technologies: State-of-the-Art ReviewPaola Lorena Ruge GarciaNoch keine Bewertungen
- A Equipment Sizes and Constraints FOR: Study ofDokument7 SeitenA Equipment Sizes and Constraints FOR: Study oftran duyNoch keine Bewertungen
- Reactive Power Compensation Technologies, State-of-the-Art ReviewDokument21 SeitenReactive Power Compensation Technologies, State-of-the-Art ReviewsharptrNoch keine Bewertungen
- Automatic Generation Control Using Artificial Neural Network Based Narma LDokument8 SeitenAutomatic Generation Control Using Artificial Neural Network Based Narma LChaudary FarazNoch keine Bewertungen
- Interline Power Flow Controller: Review Paper: Akhilesh A. Nimje, Chinmoy Kumar Panigrahi, Ajaya Kumar MohantyDokument5 SeitenInterline Power Flow Controller: Review Paper: Akhilesh A. Nimje, Chinmoy Kumar Panigrahi, Ajaya Kumar MohantyRNNoch keine Bewertungen
- Automatic Load Frequency ControlDokument54 SeitenAutomatic Load Frequency ControlRam YadavNoch keine Bewertungen
- Capability Chart For Generator-Transformer UnitsDokument4 SeitenCapability Chart For Generator-Transformer UnitsFreddy TamayoNoch keine Bewertungen
- Articulo PDFDokument6 SeitenArticulo PDFDavid Stiven Rodriguez HerreraNoch keine Bewertungen
- Loss of Field Protection For GeneratorsDokument18 SeitenLoss of Field Protection For GeneratorsDBachai84Noch keine Bewertungen
- State Feedback Controller Design Applied To Quadratic Boost Converter Used in Photovoltaic Array MPPTDokument6 SeitenState Feedback Controller Design Applied To Quadratic Boost Converter Used in Photovoltaic Array MPPTAde safitraNoch keine Bewertungen
- Voltage Regulation PDFDokument10 SeitenVoltage Regulation PDFveljal6317Noch keine Bewertungen
- Gwo ManuscriptDokument5 SeitenGwo ManuscriptMahendra KumarNoch keine Bewertungen
- Power System Stability Control Using Voltage Source Converter Based HVDC in Power Systems With A High Penetration of RenewablesDokument7 SeitenPower System Stability Control Using Voltage Source Converter Based HVDC in Power Systems With A High Penetration of RenewablesFelix GamarraNoch keine Bewertungen
- Sundar Am 2011Dokument6 SeitenSundar Am 2011Đông Huy BạchNoch keine Bewertungen
- Active Power Filter ReviewDokument11 SeitenActive Power Filter Reviewwenchen_2010Noch keine Bewertungen
- Optimal Load Frequency Control in A SingleDokument6 SeitenOptimal Load Frequency Control in A SingleDr. Ulaganathan.M, AP /EEENoch keine Bewertungen
- Lecture 9-Power - System - Control - and - StabilityDokument8 SeitenLecture 9-Power - System - Control - and - Stabilityibrahim muhammad yusufNoch keine Bewertungen
- Frequency-Bias Tie-Line Control of Hydroelectric Generating Stations For Long DistancesDokument5 SeitenFrequency-Bias Tie-Line Control of Hydroelectric Generating Stations For Long DistancesShashank MandloiNoch keine Bewertungen
- Control of Voltage Stability Using Sensitmty AnalysisDokument10 SeitenControl of Voltage Stability Using Sensitmty AnalysisJuan Alex Arequipa ChecaNoch keine Bewertungen
- Influence of Automatic Control of A Tap ChangingDokument8 SeitenInfluence of Automatic Control of A Tap ChangingRaphael NgenyiNoch keine Bewertungen
- Validation of Power Plant Transformers Re-Energization Schemes in Case of Black-Out by Comparison Between Studies and Field Tests MeasurementsDokument6 SeitenValidation of Power Plant Transformers Re-Energization Schemes in Case of Black-Out by Comparison Between Studies and Field Tests MeasurementsBožidar Filipović-GrčićNoch keine Bewertungen
- Fractional-Order Model Reference Adaptive Controller Design Using A Modified MIT Rule and A Feed-Forward ActionDokument6 SeitenFractional-Order Model Reference Adaptive Controller Design Using A Modified MIT Rule and A Feed-Forward ActionVishal PusadkarNoch keine Bewertungen
- CH - 3. Power System StablityDokument72 SeitenCH - 3. Power System StablityTsega Solomon KidaneNoch keine Bewertungen
- Study of Reactive Power Compensation Using Static Var CompenstorDokument5 SeitenStudy of Reactive Power Compensation Using Static Var CompenstorZohaib AmjadNoch keine Bewertungen
- A Tariff For Reactive PowerDokument7 SeitenA Tariff For Reactive Powerhanaa KarawiaNoch keine Bewertungen
- Load Frequency Control in Two Area Power System Using ANFISDokument10 SeitenLoad Frequency Control in Two Area Power System Using ANFISSudhir KumarNoch keine Bewertungen
- Wa0005Dokument44 SeitenWa0005Tony TunchiNoch keine Bewertungen
- 1.control Centre Operation of Power SystemsDokument27 Seiten1.control Centre Operation of Power SystemsAdarsh SurendranNoch keine Bewertungen
- 1 s2.0 S0142061501000126 MainDokument7 Seiten1 s2.0 S0142061501000126 MainKaderNoch keine Bewertungen
- Reactive Power CompensationDokument16 SeitenReactive Power Compensationచరణ్ తేజా బి విNoch keine Bewertungen
- Voltage Compensation: Reyes, Sabaña, Sombrado, Valenzuela and VivoDokument17 SeitenVoltage Compensation: Reyes, Sabaña, Sombrado, Valenzuela and VivoFreddie MendezNoch keine Bewertungen
- International Journal of Engineering Research and DevelopmentDokument9 SeitenInternational Journal of Engineering Research and DevelopmentIJERDNoch keine Bewertungen
- Unbalance, Flicker, Harmonic, Voltage and Reactive Power Compensation of The Distribution Grid Using A Universal STATOMDokument6 SeitenUnbalance, Flicker, Harmonic, Voltage and Reactive Power Compensation of The Distribution Grid Using A Universal STATOMAhmed WestministerNoch keine Bewertungen
- Design of Power System Stabilizer With Neuro Fuzzy UPFC ControllerDokument4 SeitenDesign of Power System Stabilizer With Neuro Fuzzy UPFC ControllerRamesh BabuNoch keine Bewertungen
- Stability Performance of New Static Excitation System With Boost-Buck ConverterDokument8 SeitenStability Performance of New Static Excitation System With Boost-Buck ConverterMartua MarioNoch keine Bewertungen
- Integrated Volt-Var Optimization With Distributed Energy Sources To Minimize Substation Energy in Distribution SystemDokument19 SeitenIntegrated Volt-Var Optimization With Distributed Energy Sources To Minimize Substation Energy in Distribution SystemASHISHNoch keine Bewertungen
- Effect of Thyristor Based Modulated Power Filter Compensator On Power QualityDokument8 SeitenEffect of Thyristor Based Modulated Power Filter Compensator On Power QualityerpublicationNoch keine Bewertungen
- Reactive Power Compensation For Transmission and Distribution SystemsDokument4 SeitenReactive Power Compensation For Transmission and Distribution SystemsSuranjana DasNoch keine Bewertungen
- Performance Analysis of Compensator: A PWM Inverter VARDokument12 SeitenPerformance Analysis of Compensator: A PWM Inverter VARRohit Joshi100% (1)
- 126 Lin Full PaperDokument5 Seiten126 Lin Full PaperchhristodNoch keine Bewertungen
- Wind Turbines Emulating Inertia and Supporting Primary Frequency ControlDokument2 SeitenWind Turbines Emulating Inertia and Supporting Primary Frequency ControlHải Đăng LêNoch keine Bewertungen
- BE EEE SyllabusDokument262 SeitenBE EEE Syllabusramudu sunkaraNoch keine Bewertungen
- High Voltage Engineering and Testing 2nd Edition BDokument2 SeitenHigh Voltage Engineering and Testing 2nd Edition Bramudu sunkaraNoch keine Bewertungen
- High Voltage EngineeringDokument157 SeitenHigh Voltage EngineeringDima Drobiazko100% (2)
- Partial Discharge Detection System PDFDokument5 SeitenPartial Discharge Detection System PDFramudu sunkaraNoch keine Bewertungen
- The Art & Science of Protective Relaying - C. Russell Mason - GEDokument357 SeitenThe Art & Science of Protective Relaying - C. Russell Mason - GEAasim MallickNoch keine Bewertungen
- Power System Protection and Switchgear by Badri Ram D N Vishwakarma 007107774xDokument1 SeitePower System Protection and Switchgear by Badri Ram D N Vishwakarma 007107774xramudu sunkaraNoch keine Bewertungen
- Motionplus™ Edc: Encoder Digital Controller Getting Started ManualDokument11 SeitenMotionplus™ Edc: Encoder Digital Controller Getting Started Manualgamelab1964Noch keine Bewertungen
- Simple Agelesss Methods For Field Testing Power TransformersDokument13 SeitenSimple Agelesss Methods For Field Testing Power Transformersraza239Noch keine Bewertungen
- SFBC-PWQ723 550-570W enDokument2 SeitenSFBC-PWQ723 550-570W enPatrick Lanz Molo FameroNoch keine Bewertungen
- DatasheetDokument4 SeitenDatasheetGrupo EpufmNoch keine Bewertungen
- 1252Dokument3 Seiten1252Eong Huat Corporation Sdn BhdNoch keine Bewertungen
- Servo MotorDokument21 SeitenServo Motorthreephasefault100% (1)
- Allen Bradley PLC Interview QueDokument3 SeitenAllen Bradley PLC Interview Quesuhailfarhaan100% (1)
- NHD C12864LZ FSW FBW 3V3Dokument13 SeitenNHD C12864LZ FSW FBW 3V3SrishtiNoch keine Bewertungen
- Bandwidth of Current TransformersDokument9 SeitenBandwidth of Current TransformersarturcmaNoch keine Bewertungen
- Millman's Theorem: Chapter 10 - DC Network AnalysisDokument17 SeitenMillman's Theorem: Chapter 10 - DC Network AnalysisAce Dela CruzNoch keine Bewertungen
- Resume Kummari Paramesh: (Power Electronics and Drives)Dokument3 SeitenResume Kummari Paramesh: (Power Electronics and Drives)Paramesh KumarNoch keine Bewertungen
- Ti21 TC NotesDokument157 SeitenTi21 TC NotesVikas JainNoch keine Bewertungen
- Literature Review On Gifi TechnologyDokument6 SeitenLiterature Review On Gifi Technologyzyfofohab0p2100% (1)
- SDFY Certifications .Dokument16 SeitenSDFY Certifications .Vijay - Spantech EngineersNoch keine Bewertungen
- Lab Report Process (Repaired)Dokument16 SeitenLab Report Process (Repaired)amirulNoch keine Bewertungen
- Daikin 1.5 Ton 5 Star Inverter Split AC (Copper, Anti Microbial Filter, 2020 Model, FTKG50TV, White) - Amazon - in - Home & Kitchen896Dokument10 SeitenDaikin 1.5 Ton 5 Star Inverter Split AC (Copper, Anti Microbial Filter, 2020 Model, FTKG50TV, White) - Amazon - in - Home & Kitchen896Lalit HarlalkaNoch keine Bewertungen
- Z0012048 Rcuf-Wzpy TC1-1Dokument53 SeitenZ0012048 Rcuf-Wzpy TC1-1Ferry SantosoNoch keine Bewertungen
- EcoEnergy Catalogue 081110Dokument68 SeitenEcoEnergy Catalogue 081110Hummingbird HgcNoch keine Bewertungen
- Profibus-Dp: Installation ManualDokument38 SeitenProfibus-Dp: Installation ManualLeandroNoch keine Bewertungen
- PVMET-330 User's GuideDokument14 SeitenPVMET-330 User's GuideM Fernanda Gerena DuarteNoch keine Bewertungen
- Diagnostic Trouble Codes - ECU - Engine Control UnitDokument8 SeitenDiagnostic Trouble Codes - ECU - Engine Control UnitRforceIbañez100% (9)
- Re NR 67370001Dokument7 SeitenRe NR 67370001Mauro PerezNoch keine Bewertungen
- Chaotic Multiplication Encryption Method For Security-Enhanced COOFDM-OQAM SystemsDokument4 SeitenChaotic Multiplication Encryption Method For Security-Enhanced COOFDM-OQAM Systemskrishna reddyNoch keine Bewertungen
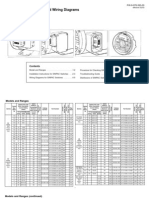
- Installation Instructions and Wiring Diagrams For All Models and RangesDokument8 SeitenInstallation Instructions and Wiring Diagrams For All Models and RangesMaria MusyNoch keine Bewertungen
- Cadence Tut 1, Cadence TutorialDokument91 SeitenCadence Tut 1, Cadence Tutorialrajivsharma1610Noch keine Bewertungen
- PHY-101 - Applied OpticsDokument2 SeitenPHY-101 - Applied Opticspriyanshi mishraNoch keine Bewertungen
- The Long and Short of Wires: Background KnowledgeDokument2 SeitenThe Long and Short of Wires: Background KnowledgeNilar SanNoch keine Bewertungen
- PUTDokument15 SeitenPUTDaisuke NiwaNoch keine Bewertungen
- Lab Manual For Series Parallel Rasonant CircuitDokument3 SeitenLab Manual For Series Parallel Rasonant CircuitManoj PardhanNoch keine Bewertungen
- OBD II Pro PlusFordDokument50 SeitenOBD II Pro PlusFordkamaleon doradoNoch keine Bewertungen
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsVon EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNoch keine Bewertungen
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterVon EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterNoch keine Bewertungen
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionBewertung: 5 von 5 Sternen5/5 (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesVon EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesBewertung: 4.5 von 5 Sternen4.5/5 (21)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!Von EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!Noch keine Bewertungen
- Renewable Energy: A Very Short IntroductionVon EverandRenewable Energy: A Very Short IntroductionBewertung: 4.5 von 5 Sternen4.5/5 (12)
- A Pathway to Decarbonise the Shipping Sector by 2050Von EverandA Pathway to Decarbonise the Shipping Sector by 2050Noch keine Bewertungen
- Shorting the Grid: The Hidden Fragility of Our Electric GridVon EverandShorting the Grid: The Hidden Fragility of Our Electric GridBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsVon EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Introduction to Power System ProtectionVon EverandIntroduction to Power System ProtectionNoch keine Bewertungen
- Nuclear Energy in the 21st Century: World Nuclear University PressVon EverandNuclear Energy in the 21st Century: World Nuclear University PressBewertung: 4.5 von 5 Sternen4.5/5 (3)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceVon EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNoch keine Bewertungen
- Heat Transfer Engineering: Fundamentals and TechniquesVon EverandHeat Transfer Engineering: Fundamentals and TechniquesBewertung: 4 von 5 Sternen4/5 (1)
- Practical Power Distribution for IndustryVon EverandPractical Power Distribution for IndustryBewertung: 2.5 von 5 Sternen2.5/5 (2)
- Practical Reservoir Engineering and CharacterizationVon EverandPractical Reservoir Engineering and CharacterizationBewertung: 4.5 von 5 Sternen4.5/5 (3)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successVon EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsVon EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNoch keine Bewertungen
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsVon EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNoch keine Bewertungen
- Renewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksVon EverandRenewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksNoch keine Bewertungen
- An Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksVon EverandAn Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksNoch keine Bewertungen
- Global Landscape of Renewable Energy FinanceVon EverandGlobal Landscape of Renewable Energy FinanceNoch keine Bewertungen
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerVon EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNoch keine Bewertungen
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Von EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Noch keine Bewertungen
- Idaho Falls: The Untold Story of America's First Nuclear AccidentVon EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentBewertung: 4.5 von 5 Sternen4.5/5 (21)
- Electric Motors and Drives: Fundamentals, Types and ApplicationsVon EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsBewertung: 4.5 von 5 Sternen4.5/5 (12)
- Grid-Scale Energy Storage Systems and ApplicationsVon EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNoch keine Bewertungen
- Practical Methods for Analysis and Design of HV Installation Grounding SystemsVon EverandPractical Methods for Analysis and Design of HV Installation Grounding SystemsBewertung: 4.5 von 5 Sternen4.5/5 (2)