Das könnte Ihnen auch gefallen
- Beams and Framed Structures: Structures and Solid Body MechanicsVon EverandBeams and Framed Structures: Structures and Solid Body MechanicsBewertung: 3 von 5 Sternen3/5 (2)
- Rotary Axis OneDokument8 SeitenRotary Axis Oneapi-297584767Noch keine Bewertungen
- GrippercalcsDokument3 SeitenGrippercalcsapi-297584767Noch keine Bewertungen
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Von EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Bewertung: 2.5 von 5 Sternen2.5/5 (2)
- Roof Column BetiDokument16 SeitenRoof Column BetiephNoch keine Bewertungen
- Case StudyDokument8 SeitenCase StudymarcoscearensevieiraNoch keine Bewertungen
- PARAMETER MOTOR 7,5 HP-dikonversiDokument2 SeitenPARAMETER MOTOR 7,5 HP-dikonversimas madNoch keine Bewertungen
- CE 264 - PS4 - NCJajurieDokument28 SeitenCE 264 - PS4 - NCJajurieRanji JajurieNoch keine Bewertungen
- Lec 2bbbDokument21 SeitenLec 2bbbNAZIM UR RAHMAN Civil EngineeringNoch keine Bewertungen
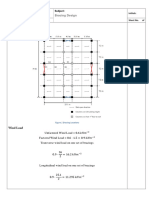
- Bracing Design CalculationDokument22 SeitenBracing Design Calculationjosephinelamsy0304Noch keine Bewertungen
- Balancing of Rotating MassesDokument17 SeitenBalancing of Rotating MassesHasan AL-BahraniNoch keine Bewertungen
- ENCV4GS - Test 1 - SolutionDokument6 SeitenENCV4GS - Test 1 - Solution217005052Noch keine Bewertungen
- Modulo 12 Beams-Design Beam-ColumnDokument10 SeitenModulo 12 Beams-Design Beam-Columncarlomonsalve1Noch keine Bewertungen
- Latihan Menghitung Parameter MotorDokument2 SeitenLatihan Menghitung Parameter MotorMuhammad FarisNoch keine Bewertungen
- Step 1: Cut Edges To Length Using Vertical Band SawDokument13 SeitenStep 1: Cut Edges To Length Using Vertical Band Sawapi-297584767Noch keine Bewertungen
- Shaft Design: Example: Line Shaft (Main), Spindle Shaft (Short), Countershaft (Intermediate)Dokument9 SeitenShaft Design: Example: Line Shaft (Main), Spindle Shaft (Short), Countershaft (Intermediate)Rs SumitNoch keine Bewertungen
- Example 1: Two-Way Solid Slab With BeamsDokument24 SeitenExample 1: Two-Way Solid Slab With BeamsDavid SanchezNoch keine Bewertungen
- Sweeney MECH610 ProjectDokument19 SeitenSweeney MECH610 Projectعبدالرحمن احمدNoch keine Bewertungen
- Problema 6-23 ShigleyDokument7 SeitenProblema 6-23 ShigleylosdesquiciadosNoch keine Bewertungen
- Module 5b Columns - Lesson 2 ASDDokument5 SeitenModule 5b Columns - Lesson 2 ASDJuan Paulo DiazNoch keine Bewertungen
- Design and Analysis Examples For Slab by Yield Line MethodDokument14 SeitenDesign and Analysis Examples For Slab by Yield Line MethodWendimu TolessaNoch keine Bewertungen
- 1 - Testing of DC Machines (Part 1)Dokument6 Seiten1 - Testing of DC Machines (Part 1)Oliver KemNoch keine Bewertungen
- Simulation and ModelingDokument23 SeitenSimulation and ModelingVincent Lasconia Jr.Noch keine Bewertungen
- CAT 2 ECE SchemeDokument2 SeitenCAT 2 ECE SchemeLaaria ChrisNoch keine Bewertungen
- Stress TransformationDokument24 SeitenStress TransformationNAZIM UR RAHMAN Civil EngineeringNoch keine Bewertungen
- Strain Measuring Techniques and Applications: Module Name: Individual Project Semester: 2Dokument27 SeitenStrain Measuring Techniques and Applications: Module Name: Individual Project Semester: 2Jethro JeyarajNoch keine Bewertungen
- Structural Theory: By: Engr. Ma. Angelica C. Avillanosa, MsceDokument32 SeitenStructural Theory: By: Engr. Ma. Angelica C. Avillanosa, MsceIvy Jill Jurada100% (1)
- Individual ReporDokument13 SeitenIndividual ReporJeremy SantosNoch keine Bewertungen
- Experiment-4: Pure Bending of Thin PlateDokument8 SeitenExperiment-4: Pure Bending of Thin PlateRahul RoyNoch keine Bewertungen
- Steel DesignDokument6 SeitenSteel DesignDad MeNoch keine Bewertungen
- CE 511 Illustrative Example 2.5-1Dokument7 SeitenCE 511 Illustrative Example 2.5-1Steve BariaNoch keine Bewertungen
- Fernandez Velazquez Andy Adair - ExamenU2Dokument4 SeitenFernandez Velazquez Andy Adair - ExamenU2Andy MärciälNoch keine Bewertungen
- BMM3533 - Two Degree of Freedom of Torsional Free Vibration SystemDokument12 SeitenBMM3533 - Two Degree of Freedom of Torsional Free Vibration SystemSyazaNoch keine Bewertungen
- Experiment-4: Pure Bending of Thin PlateDokument8 SeitenExperiment-4: Pure Bending of Thin PlateRahul RoyNoch keine Bewertungen
- Escuela de Ingeniería IndustrialDokument10 SeitenEscuela de Ingeniería IndustrialBryan DarkNoch keine Bewertungen
- CE250 HW2 NCJajurieDokument7 SeitenCE250 HW2 NCJajurieRanji JajurieNoch keine Bewertungen
- MECG1043 Design Project ReportDokument6 SeitenMECG1043 Design Project ReportAngel BlacioNoch keine Bewertungen
- Set 18 Solution ReviewedDokument14 SeitenSet 18 Solution ReviewedMuhammad SuleetNoch keine Bewertungen
- Cep Mos 2Dokument20 SeitenCep Mos 2Huzi MalixNoch keine Bewertungen
- Plate No. 6 Design of Rectangular Footing: Effective Soil PressureDokument4 SeitenPlate No. 6 Design of Rectangular Footing: Effective Soil PressurefroilanNoch keine Bewertungen
- Lecture 2 - Tension Members - Part 1Dokument10 SeitenLecture 2 - Tension Members - Part 1Dad MeNoch keine Bewertungen
- Exam - TextsDokument7 SeitenExam - TextsPietro TestaNoch keine Bewertungen
- ME305 EndSemKEY 22112017Dokument3 SeitenME305 EndSemKEY 22112017sameerakhatoon05Noch keine Bewertungen
- Quiz 2: Due: February 7, 2021Dokument10 SeitenQuiz 2: Due: February 7, 2021Theodore TolmanNoch keine Bewertungen
- Flexural Design of Prestressed Beams Using Elastic Stresses ExampleDokument5 SeitenFlexural Design of Prestressed Beams Using Elastic Stresses ExampleKristan Rae GaetosNoch keine Bewertungen
- PPT Mekflu Bismillah FixDokument23 SeitenPPT Mekflu Bismillah Fixleilana larissaNoch keine Bewertungen
- PPT Mekflu Bismillah FixDokument23 SeitenPPT Mekflu Bismillah FixfruitsbasketNoch keine Bewertungen
- PPT Mekflu Bismillah FixDokument23 SeitenPPT Mekflu Bismillah Fixleilana larissaNoch keine Bewertungen
- TRIBOLOGY EME 452 ReportDokument11 SeitenTRIBOLOGY EME 452 ReportNazirul AsyraffNoch keine Bewertungen
- Shedding KinematicsDokument15 SeitenShedding KinematicsRajendrakumarNoch keine Bewertungen
- ME-223 Assignment 7 Solutions: SolutionDokument10 SeitenME-223 Assignment 7 Solutions: SolutionShivangNoch keine Bewertungen
- T. Viswanathan 3. Ultimate Limit State of Linear Elements (Modified 28-Jul)Dokument69 SeitenT. Viswanathan 3. Ultimate Limit State of Linear Elements (Modified 28-Jul)Bridge DepartmentNoch keine Bewertungen
- A3 - 1889287 - Macias Lizardo - Carla - Ago20-Ene21Dokument19 SeitenA3 - 1889287 - Macias Lizardo - Carla - Ago20-Ene21Sasuke993Noch keine Bewertungen
- 200107M - DeSilva H.G.A.E. - Strain MeasuringDokument22 Seiten200107M - DeSilva H.G.A.E. - Strain MeasuringAwishka EashanNoch keine Bewertungen
- FINALDokument12 SeitenFINALA Veces MirNoch keine Bewertungen
- Homework # 3Dokument2 SeitenHomework # 3eniNoch keine Bewertungen
- Hydrographic SurveysDokument6 SeitenHydrographic SurveysKelly P. DionisioNoch keine Bewertungen
- 6.) Viscosity A.) Absolute Viscosity Review (M.D.B.) Types of Simple Stress 1.) Axial/Normal StressDokument6 Seiten6.) Viscosity A.) Absolute Viscosity Review (M.D.B.) Types of Simple Stress 1.) Axial/Normal StressJHONALYN NOGUERANoch keine Bewertungen
- Module 2Dokument44 SeitenModule 2Vishwa VardhanNoch keine Bewertungen
- Positioning PerformanceDokument3 SeitenPositioning Performanceapi-297584767Noch keine Bewertungen
- Circuit CalcsDokument1 SeiteCircuit Calcsapi-297584767Noch keine Bewertungen
- Step 1: Cut Edges To Length Using Vertical Band SawDokument13 SeitenStep 1: Cut Edges To Length Using Vertical Band Sawapi-297584767Noch keine Bewertungen
- LibraryresearchguidedocDokument1 SeiteLibraryresearchguidedocapi-297584767Noch keine Bewertungen
- Sean KolesarDokument1 SeiteSean Kolesarapi-297584767Noch keine Bewertungen
- COMPRESOR KAESER Ask - T - SeriesDokument136 SeitenCOMPRESOR KAESER Ask - T - SeriesTALLER NUEVEDEJULIO SATNoch keine Bewertungen
- AGE10503, Gas ProcessingDokument34 SeitenAGE10503, Gas ProcessingiranmortezaNoch keine Bewertungen
- UL FM Vertical Indicator Post Maintenance and Operation Manual - Fire Protection - Models 5400 & 5450Dokument7 SeitenUL FM Vertical Indicator Post Maintenance and Operation Manual - Fire Protection - Models 5400 & 5450Juan Jose Teodoro AguilarNoch keine Bewertungen
- 20a-Esp8266 Rtos SDK Programming Guide enDokument41 Seiten20a-Esp8266 Rtos SDK Programming Guide enkellisgfNoch keine Bewertungen
- QUBEDokument2 SeitenQUBEJován MéridaNoch keine Bewertungen
- Fire Risk of Cold Room PanelDokument6 SeitenFire Risk of Cold Room Paneldarby1028Noch keine Bewertungen
- Plan Holders ReportDokument8 SeitenPlan Holders ReportSusan KunkleNoch keine Bewertungen
- MetamterialsDokument3 SeitenMetamterialsdhruba88Noch keine Bewertungen
- Load Calculation JowharDokument6 SeitenLoad Calculation JowharKhalid Abdirashid AbubakarNoch keine Bewertungen
- ODAA Support LetterDokument2 SeitenODAA Support LetterStatesman JournalNoch keine Bewertungen
- Ampeg BA115HPTDokument3 SeitenAmpeg BA115HPTFederico BrunoNoch keine Bewertungen
- D882 PDFDokument4 SeitenD882 PDFHoangNoch keine Bewertungen
- Fpcroute User GuideDokument34 SeitenFpcroute User GuideJosé EireneNoch keine Bewertungen
- Gad Ad2 J10k1020c27a 200a201Dokument1 SeiteGad Ad2 J10k1020c27a 200a201AbdulNoch keine Bewertungen
- Is 13935 2009 PDFDokument33 SeitenIs 13935 2009 PDFManojKumawatRjNoch keine Bewertungen
- Ford's PHEV Fact SheetDokument1 SeiteFord's PHEV Fact SheetFord Motor Company100% (2)
- Mine Survey CertificationDokument37 SeitenMine Survey CertificationAgustin Eliasta Ginting100% (1)
- Certification For 4 Hyton Crescent, KewDokument1 SeiteCertification For 4 Hyton Crescent, KewWaelElMeligiNoch keine Bewertungen
- LAPORAN PRAKTIK KERJA LAPANGAN - Id.enDokument25 SeitenLAPORAN PRAKTIK KERJA LAPANGAN - Id.enAhmad JupriNoch keine Bewertungen
- Dyeing Machines: By: Ambika Udaikumar Ankita Singh Dhara Parmar Monali Wani Sonal MarwahDokument15 SeitenDyeing Machines: By: Ambika Udaikumar Ankita Singh Dhara Parmar Monali Wani Sonal MarwahMohammed Atiqul Hoque ChowdhuryNoch keine Bewertungen
- Nachi Special SteelsDokument20 SeitenNachi Special SteelsBambang MulyantoNoch keine Bewertungen
- SeaCom System Manual Rev 0401Dokument149 SeitenSeaCom System Manual Rev 0401maselo100% (1)
- Ansi Asabe S261.7 Feb1989 (R2011)Dokument5 SeitenAnsi Asabe S261.7 Feb1989 (R2011)StephanNoch keine Bewertungen
- Aset WTP HarapanDokument7 SeitenAset WTP HarapanReinhard SimbolonNoch keine Bewertungen
- Design, Engineering and Installation Manual FOR Permanent Cathodic Protection System FOR Underground PipelineDokument48 SeitenDesign, Engineering and Installation Manual FOR Permanent Cathodic Protection System FOR Underground PipelinemeratiNoch keine Bewertungen
- CPB 20104 Mass Transfer 2 UniKL MICET Experiment 1: Cooling TowerDokument20 SeitenCPB 20104 Mass Transfer 2 UniKL MICET Experiment 1: Cooling TowerSiti Hajar Mohamed100% (6)
- IBM Flex System p270 Compute Node Planning and Implementation GuideDokument630 SeitenIBM Flex System p270 Compute Node Planning and Implementation GuideAnonymous Qvouxg2aNoch keine Bewertungen
- Combined Karcher AR Trouble ShootingDokument18 SeitenCombined Karcher AR Trouble ShootingFrancisco Eric CelestinoNoch keine Bewertungen
- Tech Note 1034 - XY Plotter ActiveX Control Demo ApplicationDokument9 SeitenTech Note 1034 - XY Plotter ActiveX Control Demo ApplicationAbakash DasNoch keine Bewertungen
- Apple Value ChainDokument3 SeitenApple Value ChainKeng Keat Lim100% (2)
- To Engineer Is Human: The Role of Failure in Successful DesignVon EverandTo Engineer Is Human: The Role of Failure in Successful DesignBewertung: 4 von 5 Sternen4/5 (138)
- Piping Engineering Leadership for Process Plant ProjectsVon EverandPiping Engineering Leadership for Process Plant ProjectsBewertung: 5 von 5 Sternen5/5 (1)
- The ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemVon EverandThe ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemNoch keine Bewertungen
- Carpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresVon EverandCarpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresBewertung: 1 von 5 Sternen1/5 (2)
- Fire Protection Engineering in Building DesignVon EverandFire Protection Engineering in Building DesignBewertung: 4.5 von 5 Sternen4.5/5 (5)
- Incidents That Define Process SafetyVon EverandIncidents That Define Process SafetyNoch keine Bewertungen
- Working Guide to Pump and Pumping Stations: Calculations and SimulationsVon EverandWorking Guide to Pump and Pumping Stations: Calculations and SimulationsBewertung: 5 von 5 Sternen5/5 (3)
- Mechanics of Flow-Induced Sound and Vibration, Volume 2: Complex Flow-Structure InteractionsVon EverandMechanics of Flow-Induced Sound and Vibration, Volume 2: Complex Flow-Structure InteractionsNoch keine Bewertungen
- Electrical Safety Code Manual: A Plain Language Guide to National Electrical Code, OSHA and NFPA 70EVon EverandElectrical Safety Code Manual: A Plain Language Guide to National Electrical Code, OSHA and NFPA 70EBewertung: 3 von 5 Sternen3/5 (6)
- Guidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisVon EverandGuidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisBewertung: 5 von 5 Sternen5/5 (1)
- Onshore Structural Design Calculations: Power Plant and Energy Processing FacilitiesVon EverandOnshore Structural Design Calculations: Power Plant and Energy Processing FacilitiesBewertung: 4.5 von 5 Sternen4.5/5 (13)
- Bridge Engineering: Classifications, Design Loading, and Analysis MethodsVon EverandBridge Engineering: Classifications, Design Loading, and Analysis MethodsBewertung: 4 von 5 Sternen4/5 (16)
- Redefining Work Health and Safety: Systems, Strategies, and Progressive ApproachesVon EverandRedefining Work Health and Safety: Systems, Strategies, and Progressive ApproachesNoch keine Bewertungen
- Workbook to Accompany Maintenance & Reliability Best PracticesVon EverandWorkbook to Accompany Maintenance & Reliability Best PracticesBewertung: 3.5 von 5 Sternen3.5/5 (3)
- Functional Safety from Scratch: A Practical Guide to Process Industry ApplicationsVon EverandFunctional Safety from Scratch: A Practical Guide to Process Industry ApplicationsNoch keine Bewertungen
- A Complete Guide to Safety Officer Interview Questions and AnswersVon EverandA Complete Guide to Safety Officer Interview Questions and AnswersBewertung: 4 von 5 Sternen4/5 (1)
- Advanced Modelling Techniques in Structural DesignVon EverandAdvanced Modelling Techniques in Structural DesignBewertung: 5 von 5 Sternen5/5 (3)
- Practical Industrial Safety, Risk Assessment and Shutdown SystemsVon EverandPractical Industrial Safety, Risk Assessment and Shutdown SystemsBewertung: 4 von 5 Sternen4/5 (11)
- Marine Structural Design CalculationsVon EverandMarine Structural Design CalculationsBewertung: 4.5 von 5 Sternen4.5/5 (13)
- Structural Cross Sections: Analysis and DesignVon EverandStructural Cross Sections: Analysis and DesignBewertung: 4.5 von 5 Sternen4.5/5 (19)
- Earthquake-Resistant Structures: Design, Build, and RetrofitVon EverandEarthquake-Resistant Structures: Design, Build, and RetrofitBewertung: 4.5 von 5 Sternen4.5/5 (8)