Das könnte Ihnen auch gefallen
- Grade 10 Terms and DefinitionsDokument11 SeitenGrade 10 Terms and Definitionskhotso100% (5)
- Wireless and Mobile Computing: University of GujratDokument42 SeitenWireless and Mobile Computing: University of GujratIqra HanifNoch keine Bewertungen
- ELINT Proficiency Trainer Fact SheetDokument2 SeitenELINT Proficiency Trainer Fact SheetHutch Rev OliverNoch keine Bewertungen
- Antenna PrimerDokument102 SeitenAntenna PrimerWaqar AhmadNoch keine Bewertungen
- Satellite CommunicationDokument27 SeitenSatellite CommunicationShashin SinghNoch keine Bewertungen
- Artificial Intelligence Vehicle: Fundamentals and ApplicationsVon EverandArtificial Intelligence Vehicle: Fundamentals and ApplicationsNoch keine Bewertungen
- Radar Systems Vr19 Unit1 1Dokument126 SeitenRadar Systems Vr19 Unit1 1Mummana Mohan ShankarNoch keine Bewertungen
- Propagation BasicsDokument76 SeitenPropagation Basicsapi-3741610100% (3)
- Mobility Is The Ability of A Node To Change Its Point-Of-Attachment While Maintaining AllDokument24 SeitenMobility Is The Ability of A Node To Change Its Point-Of-Attachment While Maintaining AllDr. Sashi Kanth Reddy ANoch keine Bewertungen
- Service Manual: Survival Craft 2-Way RadioDokument34 SeitenService Manual: Survival Craft 2-Way RadioAlexNoch keine Bewertungen
- Radar Signal Interception Moves Into The Digital Age ELINT App-Bro en 3607-5019-92 v0100 72dpi PDFDokument8 SeitenRadar Signal Interception Moves Into The Digital Age ELINT App-Bro en 3607-5019-92 v0100 72dpi PDFshahab idreesNoch keine Bewertungen
- Radar FundamentalsDokument68 SeitenRadar Fundamentalssuhel000100% (1)
- Insulation Coordination in Power SystemsDokument5 SeitenInsulation Coordination in Power SystemsAndrewcaesarNoch keine Bewertungen
- Automatic Target Recognition: Fundamentals and ApplicationsVon EverandAutomatic Target Recognition: Fundamentals and ApplicationsNoch keine Bewertungen
- EMC Design GuideDokument42 SeitenEMC Design GuideDe Raghu Veer KNoch keine Bewertungen
- Introduction To RCS MeasurementsDokument8 SeitenIntroduction To RCS MeasurementsSreelakshmi ShreeNoch keine Bewertungen
- A Simple Pulse Radar SystemDokument5 SeitenA Simple Pulse Radar SystemAvinash ReddyNoch keine Bewertungen
- Radar Cross SectionDokument9 SeitenRadar Cross SectionConstantin DorinelNoch keine Bewertungen
- EM RADIATION: LIGHT, ELECTRICITY AND MAGNETISMDokument6 SeitenEM RADIATION: LIGHT, ELECTRICITY AND MAGNETISMGhaus100% (1)
- Electronic Warfare System 2015Dokument11 SeitenElectronic Warfare System 2015concept100% (1)
- Spread Spectrum and CDMA: Principles and ApplicationsVon EverandSpread Spectrum and CDMA: Principles and ApplicationsNoch keine Bewertungen
- Cyient Transmit and Receive Module For Radar SystemsDokument4 SeitenCyient Transmit and Receive Module For Radar SystemsPercy100% (1)
- Multi-Channel Transmit/receive Modules For X-Band AesaDokument3 SeitenMulti-Channel Transmit/receive Modules For X-Band AesaDhimas AfihandarinNoch keine Bewertungen
- Microcontroller Based Missile Detection and Destroying 8154 Rv8KK7qDokument21 SeitenMicrocontroller Based Missile Detection and Destroying 8154 Rv8KK7qThor OdinsonNoch keine Bewertungen
- Range Instrumentation Radars: Key Developments Over the Past DecadeDokument11 SeitenRange Instrumentation Radars: Key Developments Over the Past DecadeMaxamed CabdiraximNoch keine Bewertungen
- Radar Quick Reference GuideDokument38 SeitenRadar Quick Reference Guide5emoNoch keine Bewertungen
- Radar Data and Relationships: Radar Bands Linear DB ScaleDokument2 SeitenRadar Data and Relationships: Radar Bands Linear DB ScaleSusana RojasNoch keine Bewertungen
- Ship Phase Array RadarsDokument12 SeitenShip Phase Array RadarsDefenceDogNoch keine Bewertungen
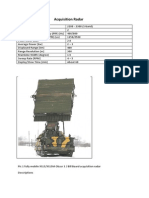
- Fact Sheet - Bill BoardDokument2 SeitenFact Sheet - Bill BoardNick NumlkNoch keine Bewertungen
- Effective Electronic Attack and Support SimulationDokument2 SeitenEffective Electronic Attack and Support SimulationAnonymous 9kBzA2100% (1)
- RADAR Signal Data Acquisition, Conditioning & Processing System Technical ProposalDokument27 SeitenRADAR Signal Data Acquisition, Conditioning & Processing System Technical ProposalNataraju GandlaNoch keine Bewertungen
- Risk Management Lessons Learned From The APG - 79 Radar Test Planning and ExecutionDokument51 SeitenRisk Management Lessons Learned From The APG - 79 Radar Test Planning and Executionjade8880Noch keine Bewertungen
- Digital Phased Arrays ChallangesDokument17 SeitenDigital Phased Arrays ChallangesVivek KadamNoch keine Bewertungen
- MIMO Radar A Idea Whose Time Has ComeDokument8 SeitenMIMO Radar A Idea Whose Time Has Cometrongnguyen29Noch keine Bewertungen
- Mutual Coupling in Antenna Arrays: Guest Editors: Hon Tat Hui, Marek E. Bialkowski, and Hoi Shun LuiDokument94 SeitenMutual Coupling in Antenna Arrays: Guest Editors: Hon Tat Hui, Marek E. Bialkowski, and Hoi Shun LuiMd AhmedNoch keine Bewertungen
- IMPATT and TRAPATT Diodes for Microwave OscillationDokument107 SeitenIMPATT and TRAPATT Diodes for Microwave OscillationKenNoch keine Bewertungen
- Syntonics FSS AntennaBriefingDokument6 SeitenSyntonics FSS AntennaBriefinghillnerNoch keine Bewertungen
- 725 Intro-F12Dokument98 Seiten725 Intro-F12Mahaboob SubahanNoch keine Bewertungen
- IIT-BHU Literature Review of Direction Finding AntennasDokument29 SeitenIIT-BHU Literature Review of Direction Finding AntennasVaishali SinghNoch keine Bewertungen
- MIMO Radar: Snake Oil or Good Idea?: RaytheonDokument5 SeitenMIMO Radar: Snake Oil or Good Idea?: RaytheontianNoch keine Bewertungen
- SDR in Direction Finding RFDesign 0105Dokument6 SeitenSDR in Direction Finding RFDesign 0105vaibhawamishra32Noch keine Bewertungen
- Thales Liberty Radio Solves Interoperability IssuesDokument14 SeitenThales Liberty Radio Solves Interoperability IssuesCharles Gamelin100% (1)
- Hypothesis Tracking PDFDokument14 SeitenHypothesis Tracking PDFMiguel AguilarNoch keine Bewertungen
- 2 Radar Systems SyllabusDokument1 Seite2 Radar Systems SyllabuslakkepoguNoch keine Bewertungen
- New Guidance Filter Structure For Homing Missiles With Strapdown IIR SeekerDokument10 SeitenNew Guidance Filter Structure For Homing Missiles With Strapdown IIR SeekerMissile MtaNoch keine Bewertungen
- SARDokument204 SeitenSARArash MazandaraniNoch keine Bewertungen
- Microwave Filter DesignDokument7 SeitenMicrowave Filter DesignduwuNoch keine Bewertungen
- Ch5-Radar Target and ClutterDokument44 SeitenCh5-Radar Target and ClutterWesley GeorgeNoch keine Bewertungen
- X Band T/R Modules: ApplicationsDokument2 SeitenX Band T/R Modules: ApplicationsHassan MehmoodNoch keine Bewertungen
- Adaptive Active Phased Array Radar PresentationDokument17 SeitenAdaptive Active Phased Array Radar PresentationHarika Kilari50% (2)
- How To Measure LTEDokument13 SeitenHow To Measure LTEfarrukhmohammedNoch keine Bewertungen
- Risat 1Dokument12 SeitenRisat 1ramulu_492Noch keine Bewertungen
- RADAR SYSTEMS VR19-unit2Dokument59 SeitenRADAR SYSTEMS VR19-unit2Mummana Mohan ShankarNoch keine Bewertungen
- RCS measurement of standard targets using VNADokument43 SeitenRCS measurement of standard targets using VNARajat RathiNoch keine Bewertungen
- Antennas PatternsDokument17 SeitenAntennas PatternsJohn HakimNoch keine Bewertungen
- Radar Systems: Iv B.Tech I Sem EceDokument82 SeitenRadar Systems: Iv B.Tech I Sem Eceankit_jain_160Noch keine Bewertungen
- Complete Design of A Microstrip Line CouplerDokument6 SeitenComplete Design of A Microstrip Line CouplerJoe MullerNoch keine Bewertungen
- Effect of The Internet-Of-Things On Fire Control and Weapon SystemsDokument20 SeitenEffect of The Internet-Of-Things On Fire Control and Weapon SystemsMimidbe BibiNoch keine Bewertungen
- Extracted Pages From RADAR SYSTEMS - Unit-4Dokument17 SeitenExtracted Pages From RADAR SYSTEMS - Unit-4ChintuNoch keine Bewertungen
- Radio Remote-Control and Telemetry and Their Application to MissilesVon EverandRadio Remote-Control and Telemetry and Their Application to MissilesBewertung: 4 von 5 Sternen4/5 (1)
- Mathematical Theory of Connecting Networks and Telephone TrafficVon EverandMathematical Theory of Connecting Networks and Telephone TrafficNoch keine Bewertungen
- Tuto SWODokument8 SeitenTuto SWONur SyahirahNoch keine Bewertungen
- 14.1 Wave ExercisesDokument8 Seiten14.1 Wave ExercisesHaha XiNoch keine Bewertungen
- Review On Travelling WaveDokument4 SeitenReview On Travelling WaveaiswaryaNoch keine Bewertungen
- AS Physics: Number of Pixels X Bits Per Pixel and 1 Byte 8 BitsDokument2 SeitenAS Physics: Number of Pixels X Bits Per Pixel and 1 Byte 8 BitsAnanYasinNoch keine Bewertungen
- Chapter 06 - WavesDokument9 SeitenChapter 06 - WavesAl NazurisNoch keine Bewertungen
- Physics PreU IGCSEDokument103 SeitenPhysics PreU IGCSEfajarsalami100% (1)
- Finite Element Modelling and Simulation of Gun Dynamics Using ANSYS'Dokument5 SeitenFinite Element Modelling and Simulation of Gun Dynamics Using ANSYS'Yousaf SaidalaviNoch keine Bewertungen
- Newtonian PhysicsDokument282 SeitenNewtonian PhysicsMahdiya OnuesekeNoch keine Bewertungen
- Conclusion:: Alternating Current vs. Direct CurrentDokument6 SeitenConclusion:: Alternating Current vs. Direct CurrentJeffrey TanNoch keine Bewertungen
- 5G OTA MeasurementsDokument10 Seiten5G OTA MeasurementsOhMyCatNoch keine Bewertungen
- Olive Verte en 2Dokument339 SeitenOlive Verte en 2Alain RifatNoch keine Bewertungen
- G8 Q1 Module-6.LightDokument10 SeitenG8 Q1 Module-6.LightMark Christian SanicoNoch keine Bewertungen
- Thesis Haichun Configuratia Electronica TabelDokument229 SeitenThesis Haichun Configuratia Electronica TabelAngela StefanNoch keine Bewertungen
- 9702 Questions May June 2014Dokument16 Seiten9702 Questions May June 2014Jason RayNoch keine Bewertungen
- Physics Force and Motion Multiple Choice QuestionsDokument13 SeitenPhysics Force and Motion Multiple Choice QuestionsIzza MangalindanNoch keine Bewertungen
- Sci ReviewerDokument18 SeitenSci Reviewerd0092750Noch keine Bewertungen
- EEN 330 Electromagnetics I: Dr. M. Bou SanayehDokument32 SeitenEEN 330 Electromagnetics I: Dr. M. Bou SanayehjulioNoch keine Bewertungen
- Bio Les Balancing ArticleDokument4 SeitenBio Les Balancing Articlegabriel1963Noch keine Bewertungen
- Multidisciplinary Optimization With Applications To Sonic-Boom MinimizationDokument24 SeitenMultidisciplinary Optimization With Applications To Sonic-Boom MinimizationligNoch keine Bewertungen
- Ripple TankDokument16 SeitenRipple TankRose Eden CantoNoch keine Bewertungen
- Lecture Powerpoint: Physics: Principles With Applications, 6 EditionDokument35 SeitenLecture Powerpoint: Physics: Principles With Applications, 6 EditionJan Marlon GoritNoch keine Bewertungen
- Waves in Isotropic Media: Dielectrics and Conductors: in This Lecture You Will LearnDokument10 SeitenWaves in Isotropic Media: Dielectrics and Conductors: in This Lecture You Will LearnHuseyin OztoprakNoch keine Bewertungen
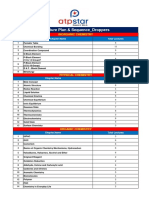
- Lecture Plan & Sequence - Droppers: Inorganic ChemistryDokument3 SeitenLecture Plan & Sequence - Droppers: Inorganic ChemistryrajNoch keine Bewertungen
- Chapter 38 - Photons and Matter WavesDokument12 SeitenChapter 38 - Photons and Matter WavesVV Cephei100% (1)
- Taylor Bar TestDokument20 SeitenTaylor Bar TestJasmine RaiNoch keine Bewertungen
- P2 HL Standing Waves 35 charsDokument8 SeitenP2 HL Standing Waves 35 charsAnthony Felser SutantoNoch keine Bewertungen