Das könnte Ihnen auch gefallen
- A-level Maths Revision: Cheeky Revision ShortcutsVon EverandA-level Maths Revision: Cheeky Revision ShortcutsBewertung: 3.5 von 5 Sternen3.5/5 (8)
- Linear Algebra Matrices, Vectors, Determinants. Linear SystemsDokument53 SeitenLinear Algebra Matrices, Vectors, Determinants. Linear SystemsHaroldNoch keine Bewertungen
- Ce09 L5 100823 CVMDokument3 SeitenCe09 L5 100823 CVMAicelleNoch keine Bewertungen
- Matb 314 & Matb 253 - Linear AlgebraDokument30 SeitenMatb 314 & Matb 253 - Linear AlgebraTilz TilanzNoch keine Bewertungen
- 8 1 Cramers Rule 4 Simul Linear Eqns PDFDokument12 Seiten8 1 Cramers Rule 4 Simul Linear Eqns PDFEep JayNoch keine Bewertungen
- Linear AlgebraDokument15 SeitenLinear Algebraolivermaibam19Noch keine Bewertungen
- Linear Algebra Notes PDFDokument3 SeitenLinear Algebra Notes PDFJOhnNoch keine Bewertungen
- Solving Simultaneous Linear Equations: Presented By: Soha Tharwat Aly Abd El-Rahman Makhyoun Presented ToDokument11 SeitenSolving Simultaneous Linear Equations: Presented By: Soha Tharwat Aly Abd El-Rahman Makhyoun Presented ToSoha MakhyounNoch keine Bewertungen
- Basic Theorem of Linear ProgrammingDokument4 SeitenBasic Theorem of Linear ProgrammingMithun HaridasNoch keine Bewertungen
- Linear Equations and MatricesDokument4 SeitenLinear Equations and MatricesMary Jane AguinaldoNoch keine Bewertungen
- MTH501 MIDTERM SOLVED MCQS by JUNAIDDokument37 SeitenMTH501 MIDTERM SOLVED MCQS by JUNAIDAbdurrehman M.IbrahimNoch keine Bewertungen
- Linear Algebra - Matrix MethodDokument24 SeitenLinear Algebra - Matrix MethodEugene BusicoNoch keine Bewertungen
- Linear Inequalities and Linear EquationsDokument11 SeitenLinear Inequalities and Linear EquationsLuqman J. Cheema100% (1)
- Unit 1P3Dokument15 SeitenUnit 1P3Manepalli Sri Sai SiddharthaNoch keine Bewertungen
- Unit 1 PT 3 Gaussian Elim Part 1Dokument17 SeitenUnit 1 PT 3 Gaussian Elim Part 1sprinklesdb16Noch keine Bewertungen
- LarLinAlg8 LecturePPTs 04 06Dokument36 SeitenLarLinAlg8 LecturePPTs 04 06Dump AccountNoch keine Bewertungen
- Linear Equations and MatricesDokument30 SeitenLinear Equations and MatricesArnab GergasiNoch keine Bewertungen
- Condition Numbers and Backward Error of A Matrix PDokument19 SeitenCondition Numbers and Backward Error of A Matrix PDiana Mendez AstudilloNoch keine Bewertungen
- CPNM Lecture 14 Solutions To Linear Simultaneous EquationsDokument34 SeitenCPNM Lecture 14 Solutions To Linear Simultaneous EquationsSaptarshi KunduNoch keine Bewertungen
- Algebra 1Dokument10 SeitenAlgebra 1Humza ShaikhNoch keine Bewertungen
- Paper I Algebra IDokument115 SeitenPaper I Algebra ISayli KomurlekarNoch keine Bewertungen
- EEEN519 Practice Questions and ASSIGNMETDokument11 SeitenEEEN519 Practice Questions and ASSIGNMETMustapha ShehuNoch keine Bewertungen
- 20220108202159D6130 - 01-02 Systems of Linear Equations-UpdateDokument31 Seiten20220108202159D6130 - 01-02 Systems of Linear Equations-Updatejidan 07Noch keine Bewertungen
- Chap3 LinearequationsDokument7 SeitenChap3 LinearequationsAd EverythingNoch keine Bewertungen
- Week3 EEE5012 Systems of Linear Eq Part1Dokument11 SeitenWeek3 EEE5012 Systems of Linear Eq Part1Omar Seraj Ed-DeenNoch keine Bewertungen
- Systems of Linear Equations: Computational ConsiderationsDokument7 SeitenSystems of Linear Equations: Computational ConsiderationsAhmed HwaidiNoch keine Bewertungen
- Chapter Three Systems of Linear Equations: Dr. Asma AlramleDokument12 SeitenChapter Three Systems of Linear Equations: Dr. Asma AlramleRetaj LibyaNoch keine Bewertungen
- m40 s12 Lecture4Dokument3 Seitenm40 s12 Lecture4ammar_harbNoch keine Bewertungen
- MTH501 Quiz-1 by Attiq Kundi-UpdatedDokument14 SeitenMTH501 Quiz-1 by Attiq Kundi-UpdatedAbdurrehman M.IbrahimNoch keine Bewertungen
- WEEK 5-StudentDokument47 SeitenWEEK 5-Studenthafiz patahNoch keine Bewertungen
- LAO MatricsDokument4 SeitenLAO Matricshodcommerceeve rkmvcNoch keine Bewertungen
- MATH 4A - Linear Algebra With Applications: Lecture 4: Parametric Vector Forms of Solution SetsDokument30 SeitenMATH 4A - Linear Algebra With Applications: Lecture 4: Parametric Vector Forms of Solution SetsakshayNoch keine Bewertungen
- Determinant of A MatrixDokument4 SeitenDeterminant of A MatrixAhmed Mohammed SallamNoch keine Bewertungen
- Ls. Linear SystemsDokument6 SeitenLs. Linear SystemsZubinJainNoch keine Bewertungen
- linear Algebra Lectures::: MTL101:::: July-November 2015Dokument1 Seitelinear Algebra Lectures::: MTL101:::: July-November 2015Ashit KumarNoch keine Bewertungen
- The Pseudoinverse of A Rectangular Matrix and Its Statistical ApplicationsDokument6 SeitenThe Pseudoinverse of A Rectangular Matrix and Its Statistical Applicationsvahid mesicNoch keine Bewertungen
- Pertemuan 1-2Dokument9 SeitenPertemuan 1-2Seva ZidanNoch keine Bewertungen
- Part4 Linear EquationsDokument39 SeitenPart4 Linear Equationszepozepo06Noch keine Bewertungen
- Linear ProgrammingDokument28 SeitenLinear ProgrammingRaka SubiNoch keine Bewertungen
- Matrix Eigenvalue Problems: Introduction: CHAP. 20 Numeric Linear AlgebraDokument4 SeitenMatrix Eigenvalue Problems: Introduction: CHAP. 20 Numeric Linear AlgebraSakinah IndahNoch keine Bewertungen
- (B-C) Dictionary of Algebra, Arithmetic, and Trigonometry PDFDokument21 Seiten(B-C) Dictionary of Algebra, Arithmetic, and Trigonometry PDFhamkarimNoch keine Bewertungen
- Elementary Linear AlgebraDokument20 SeitenElementary Linear AlgebraArviena JasmineNoch keine Bewertungen
- MAE 200A - Homework Set #1Dokument2 SeitenMAE 200A - Homework Set #1vsauerNoch keine Bewertungen
- CH 2 Linear Equations 11Dokument28 SeitenCH 2 Linear Equations 11zhero7Noch keine Bewertungen
- Edward Penney Matrix SystemsDokument13 SeitenEdward Penney Matrix Systemsluigi.cumabigNoch keine Bewertungen
- MIT18 ProblemDokument4 SeitenMIT18 ProblemJulian RestrepoNoch keine Bewertungen
- Linear Algebra in A NutshellDokument6 SeitenLinear Algebra in A NutshellDocFunkensteinNoch keine Bewertungen
- Chapter 1Dokument13 SeitenChapter 1Aniket BhandareNoch keine Bewertungen
- Solving Systems of Equations: MATH 15-1 Linear Algebra Week 2Dokument53 SeitenSolving Systems of Equations: MATH 15-1 Linear Algebra Week 2JP PunsalanNoch keine Bewertungen
- System of Linear EquationsDokument24 SeitenSystem of Linear EquationsKerpa Meida DkharNoch keine Bewertungen
- Exercises 03Dokument5 SeitenExercises 03davyjones1147Noch keine Bewertungen
- Engineering Analysis - Third Petrolium - Part1 PDFDokument45 SeitenEngineering Analysis - Third Petrolium - Part1 PDFUthman MohammedNoch keine Bewertungen
- Lab 99Dokument18 SeitenLab 99Dom ClutarioNoch keine Bewertungen
- Quadratic EquationDokument13 SeitenQuadratic EquationHaimen BuisanNoch keine Bewertungen
- Linear Algebra Chapter 1: Systems of Linear Equations: Nguyen Thi Minh TamDokument23 SeitenLinear Algebra Chapter 1: Systems of Linear Equations: Nguyen Thi Minh TamLê Vũ Anh NguyễnNoch keine Bewertungen
- MathematicsDokument66 SeitenMathematicsTUSHIT JHANoch keine Bewertungen
- System of Linear EquationsDokument75 SeitenSystem of Linear Equationsnoli_ediNoch keine Bewertungen
- Pair of Linear Equations in 2 VariablesDokument36 SeitenPair of Linear Equations in 2 VariablesshaNoch keine Bewertungen
- MM BookDokument69 SeitenMM BookMark Lacaste De GuzmanNoch keine Bewertungen
- Numerical Methods NotesDokument180 SeitenNumerical Methods NotesSyed Hasif Sy Mohamad100% (1)
- A Computational Model For Suspended Large Rigid Bodies in 3D Unsteady Viscous Flows XiaoDokument32 SeitenA Computational Model For Suspended Large Rigid Bodies in 3D Unsteady Viscous Flows XiaowatersakanaNoch keine Bewertungen
- Quiz 1 For Weeks 1 - 3Dokument4 SeitenQuiz 1 For Weeks 1 - 3Zetrock JezzNoch keine Bewertungen
- MMDA Handbook 2023Dokument111 SeitenMMDA Handbook 2023Guido CampuzanoNoch keine Bewertungen
- General Mathematics: Quarter 1 - Module 25: Representations of Logarithmic FunctionsDokument27 SeitenGeneral Mathematics: Quarter 1 - Module 25: Representations of Logarithmic FunctionsDaphneeNoch keine Bewertungen
- Maths QP Set-1Dokument6 SeitenMaths QP Set-1Zam NaizamNoch keine Bewertungen
- Vibration of Continuous SystemsDokument14 SeitenVibration of Continuous SystemsRidwan OlatunjiNoch keine Bewertungen
- Differential Calculus EXAM ANSWEY KEYDokument2 SeitenDifferential Calculus EXAM ANSWEY KEYlarry soiranoNoch keine Bewertungen
- Oscillation of Second Order Nonlinear Neutral Differential Equations With Mixed Neutral TermDokument10 SeitenOscillation of Second Order Nonlinear Neutral Differential Equations With Mixed Neutral TermRobin Achmad KurenaiNoch keine Bewertungen
- Theory of Robot ControlDokument398 SeitenTheory of Robot ControlAnonymous PWLcxxQNoch keine Bewertungen
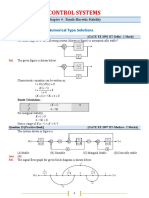
- Control Systems: GATE Objective & Numerical Type SolutionsDokument14 SeitenControl Systems: GATE Objective & Numerical Type SolutionsAakash DewanganNoch keine Bewertungen
- The Z-Transform and Its Roc Properties: - ObjectivesDokument11 SeitenThe Z-Transform and Its Roc Properties: - ObjectivesJane LitouwNoch keine Bewertungen
- 4 First Order ResponseDokument30 Seiten4 First Order Responsepriya_pigletNoch keine Bewertungen
- MSC NastranDokument6 SeitenMSC NastranJan ScarNoch keine Bewertungen
- Force VectorDokument47 SeitenForce Vectoradeliene 25Noch keine Bewertungen
- 2.3 Real Zeros of PolynomialDokument35 Seiten2.3 Real Zeros of PolynomialYukiC123Noch keine Bewertungen
- Advanced Mathematics Module 3: Systems of Linear Equations: Prepared byDokument13 SeitenAdvanced Mathematics Module 3: Systems of Linear Equations: Prepared byJohn Steven LlorcaNoch keine Bewertungen
- DESMOS Graphing AssignmentDokument17 SeitenDESMOS Graphing AssignmentAnonymous 7GjdlMDoGNoch keine Bewertungen
- HW: Solve The Example ForDokument3 SeitenHW: Solve The Example ForNarjes WalidNoch keine Bewertungen
- Chapter 3 Exponential and Logarithmic FunctionsDokument17 SeitenChapter 3 Exponential and Logarithmic Functionsapi-3704862100% (4)
- Index of PonnusamyDokument3 SeitenIndex of PonnusamyAnkit KambojNoch keine Bewertungen
- Chap 2Dokument65 SeitenChap 2Daniel Madan Raja SNoch keine Bewertungen
- Boat - Time Sol - 2Dokument2 SeitenBoat - Time Sol - 2fun with physics100% (1)
- Mathematics - Problem Sheet Level 1 - GATE 2018Dokument4 SeitenMathematics - Problem Sheet Level 1 - GATE 2018RajatTripathiNoch keine Bewertungen
- DSP LAB MANUAL 2017 ODD RMK PDFDokument144 SeitenDSP LAB MANUAL 2017 ODD RMK PDFRajee100% (2)
- Lambdsfsdfca Exp. QuestionsDokument13 SeitenLambdsfsdfca Exp. QuestionsNaman BansalNoch keine Bewertungen
- Differentiation 1Dokument5 SeitenDifferentiation 1Sahil SinghNoch keine Bewertungen
- Finite Volume MethodDokument2 SeitenFinite Volume MethodRhea MambaNoch keine Bewertungen
- Co - Ordinate Systems: Engr. Mansoor A. Soomro Assistant Professor, Department of Electrical Engineering, MUET, JamshoroDokument28 SeitenCo - Ordinate Systems: Engr. Mansoor A. Soomro Assistant Professor, Department of Electrical Engineering, MUET, JamshoroAwesh KumarNoch keine Bewertungen
- Mind Action Series Ggrade 11 Paper 1 MemorandumDokument10 SeitenMind Action Series Ggrade 11 Paper 1 MemorandumlashefosterNoch keine Bewertungen