Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- 74AHC1G86 74AHCT1G86: 1. General DescriptionDokument12 Seiten74AHC1G86 74AHCT1G86: 1. General DescriptionKushalSwamyNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Lossless Image Compression Based On Data FoldingDokument6 SeitenLossless Image Compression Based On Data FoldingKushalSwamyNoch keine Bewertungen
- TPS54331EVM-232 3-A, SWIFT™ Regulator Evaluation: User's GuideDokument15 SeitenTPS54331EVM-232 3-A, SWIFT™ Regulator Evaluation: User's GuideKushalSwamyNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Sem 2Dokument8 SeitenSem 2KushalSwamyNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Testing 13Dokument21 SeitenTesting 13KushalSwamyNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Introduction To Boundary Scan Test and In-System ProgrammingDokument6 SeitenIntroduction To Boundary Scan Test and In-System ProgrammingKushalSwamyNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Individual Projects PDFDokument7 SeitenA Individual Projects PDFKushalSwamyNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- 1 Auxilliary Equipment - US PricingDokument132 Seiten1 Auxilliary Equipment - US PricingOscar EspitiaNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- D Cmos L: Omino OgicDokument14 SeitenD Cmos L: Omino OgicArpan Katiyar 2K18EC043Noch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
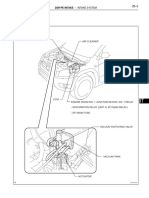
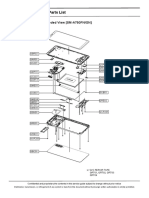
- Intake System: Parts LocationDokument7 SeitenIntake System: Parts LocationMenzie Peter RefolNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Smart Control For Home Water Heater Saving PDFDokument111 SeitenSmart Control For Home Water Heater Saving PDFPrashant JagadaleNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Theoretical Normalized Site Attenuation Calculations by Spreadsheet AnalysisDokument6 SeitenTheoretical Normalized Site Attenuation Calculations by Spreadsheet AnalysisManny BarronNoch keine Bewertungen
- Water Quality Monitoring and Notification System U PDFDokument4 SeitenWater Quality Monitoring and Notification System U PDFMukund KumarNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- CW-3000 Industrial Chiller User ManualDokument12 SeitenCW-3000 Industrial Chiller User ManualPARTHIBAN RETECHNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Invoice I Phone 7Dokument1 SeiteInvoice I Phone 7tanishkrajak3108Noch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Simplex Truesite Workstation Configurator: Reference ManualDokument136 SeitenSimplex Truesite Workstation Configurator: Reference ManualRaviNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Making A Powerful 1 Watt LED Driver Using A Cell Phone ChargerDokument95 SeitenMaking A Powerful 1 Watt LED Driver Using A Cell Phone ChargerHutanu Gabriel0% (1)
- M 312 2000.04 EngelsDokument24 SeitenM 312 2000.04 EngelsAlvaro Flores100% (1)
- Micom Alstom P642, P643, P645: Transformer Protection RelayDokument790 SeitenMicom Alstom P642, P643, P645: Transformer Protection RelayEAST. KWAK100% (2)
- PWMDokument57 SeitenPWMAhmed Mortuza Saleque SaikotNoch keine Bewertungen
- Impulse and Continuous Vibration MeasurementDokument8 SeitenImpulse and Continuous Vibration MeasurementMalick Sungu100% (1)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Micno Ke300a 01 Solar Pump Inverter CatalogDokument8 SeitenMicno Ke300a 01 Solar Pump Inverter CatalogIbrahima DialloNoch keine Bewertungen
- ECAS Electronically Controlled Air Suspension/ EFR Electronic Shock Absorber Control 6x2 FNLL (Nordland)Dokument4 SeitenECAS Electronically Controlled Air Suspension/ EFR Electronic Shock Absorber Control 6x2 FNLL (Nordland)Mircea GilcaNoch keine Bewertungen
- Introduction To Basic ElectronicsDokument40 SeitenIntroduction To Basic ElectronicsPatrick TeodoroNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Td01602002e PDFDokument4 SeitenTd01602002e PDFAllan SeminarioNoch keine Bewertungen
- Vlsi Unit IvDokument72 SeitenVlsi Unit IvDr kishore sanapalaNoch keine Bewertungen
- Features: Metrosil / Resistor ModuleDokument8 SeitenFeatures: Metrosil / Resistor ModuleTunLi AngNoch keine Bewertungen
- Manual Secador Mdcw50Dokument115 SeitenManual Secador Mdcw50daniel menaNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Umfluxus G6v4-2en 1 1Dokument244 SeitenUmfluxus G6v4-2en 1 1Ali HadiNoch keine Bewertungen
- Sm-A750fn Common Evapl 3Dokument2 SeitenSm-A750fn Common Evapl 3J Carlos Menacho SNoch keine Bewertungen
- PCB MakingDokument3 SeitenPCB MakingAngelica Mae BanaagNoch keine Bewertungen
- 1VAL088301-TG RevB ReliaGearSB TechGuide DigitalDokument72 Seiten1VAL088301-TG RevB ReliaGearSB TechGuide DigitalsimonNoch keine Bewertungen
- SQL Contadores de PerformanceDokument7 SeitenSQL Contadores de Performancejemfo761Noch keine Bewertungen
- SIM900 GSM Shield Users Manual PDFDokument9 SeitenSIM900 GSM Shield Users Manual PDFrotvogelNoch keine Bewertungen
- DVD Home Theater Sound System: SA-PT150E SA-PT150EB SA-PT150EGDokument105 SeitenDVD Home Theater Sound System: SA-PT150E SA-PT150EB SA-PT150EGToni TrifuNoch keine Bewertungen
- Single Phase Induction Motor Adjustable Speed Control Using DSP and Micro-ControllerDokument11 SeitenSingle Phase Induction Motor Adjustable Speed Control Using DSP and Micro-ControllerRajan GuptaNoch keine Bewertungen
- Infinity - Minuette Sys & Minuette MCS (Depliant)Dokument2 SeitenInfinity - Minuette Sys & Minuette MCS (Depliant)nesadNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)