Das könnte Ihnen auch gefallen
- Amateur Radio Electronics on Your MobileVon EverandAmateur Radio Electronics on Your MobileBewertung: 5 von 5 Sternen5/5 (1)
- Analogue Communication 1Dokument69 SeitenAnalogue Communication 1Malu SakthiNoch keine Bewertungen
- Advance Digital CommunicationDokument38 SeitenAdvance Digital CommunicationKenNediaNoch keine Bewertungen
- Signals and SystemsDokument67 SeitenSignals and Systemsyadagiri devarakondaNoch keine Bewertungen
- Signals and Classificaiton of SignalsDokument20 SeitenSignals and Classificaiton of SignalsOdebunmi Noah EniolaNoch keine Bewertungen
- Analolug and Digital Communication: Submitted BYDokument44 SeitenAnalolug and Digital Communication: Submitted BYAnsh MathurNoch keine Bewertungen
- Cours Anglais 3 2020Dokument2 SeitenCours Anglais 3 2020Hudaa EltNoch keine Bewertungen
- Université Mohamed KHEIDER, Biskra Faculté Des Sciences Et de La Technologie Département Génie Electrique Année: 2020/2021Dokument2 SeitenUniversité Mohamed KHEIDER, Biskra Faculté Des Sciences Et de La Technologie Département Génie Electrique Année: 2020/2021Hudaa EltNoch keine Bewertungen
- Xc5354 Signals and Systems R2019: Integrated M.SC (Cs/It) Iii SemesterDokument101 SeitenXc5354 Signals and Systems R2019: Integrated M.SC (Cs/It) Iii SemestermumamaduraiNoch keine Bewertungen
- ECE 7 ActivityDokument4 SeitenECE 7 Activitywilmar cadungogNoch keine Bewertungen
- PTSP - Lecture Notes - 2019-Modified Sllabus PDFDokument170 SeitenPTSP - Lecture Notes - 2019-Modified Sllabus PDFSai poorvajaNoch keine Bewertungen
- Université Mohamed KHEIDER, Biskra Faculté Des Sciences Et de La Technologie Département Génie Electrique Année: 2020/2021Dokument2 SeitenUniversité Mohamed KHEIDER, Biskra Faculté Des Sciences Et de La Technologie Département Génie Electrique Année: 2020/2021Sedik AounNoch keine Bewertungen
- Course File: SUBJECT: Probability Theory and Random ProcessDokument162 SeitenCourse File: SUBJECT: Probability Theory and Random Processniharikarllameddy.kaNoch keine Bewertungen
- Analog Communication UNIT-1: RANDOM PROCESS: Random Variables: Several RandomDokument8 SeitenAnalog Communication UNIT-1: RANDOM PROCESS: Random Variables: Several RandomChaitan NandanNoch keine Bewertungen
- PSTS 23344Dokument67 SeitenPSTS 23344dravinatha9704Noch keine Bewertungen
- Ocw Ei 404-1Dokument91 SeitenOcw Ei 404-1Srabani ghoshalNoch keine Bewertungen
- Classification of SignalsDokument72 SeitenClassification of SignalspoomagalNoch keine Bewertungen
- Course EEE 431: Communication PrinciplesDokument44 SeitenCourse EEE 431: Communication Principlesabdul.azeezNoch keine Bewertungen
- Basic Concept of CommunicationDokument9 SeitenBasic Concept of CommunicationShuvodip Das100% (5)
- Analog Communication: Unit - IDokument43 SeitenAnalog Communication: Unit - IHridesh VishwdewaNoch keine Bewertungen
- AM GenerationDokument132 SeitenAM GenerationShashank Kna Hna Hs100% (2)
- Spectrum Analyzer PrelabDokument11 SeitenSpectrum Analyzer PrelabMohammed EllafiNoch keine Bewertungen
- All About ModulationDokument0 SeitenAll About Modulationkrtica1989Noch keine Bewertungen
- Logarithmic CompandingDokument20 SeitenLogarithmic CompandingSanthosh KrishnaNoch keine Bewertungen
- Term Paper Report: Applications of Random SignalsDokument10 SeitenTerm Paper Report: Applications of Random SignalsNilu PatelNoch keine Bewertungen
- Module 3Dokument36 SeitenModule 3ARJUN BEDI204005Noch keine Bewertungen
- EE T65 Digital Signal ProcessingDokument34 SeitenEE T65 Digital Signal ProcessingThiagu Rajiv100% (1)
- Digital Signal Processing NotesDokument12 SeitenDigital Signal Processing NotesDanial ZamanNoch keine Bewertungen
- Analog Communication UNIT-1: RANDOM PROCESS: Random Variables: Several RandomDokument8 SeitenAnalog Communication UNIT-1: RANDOM PROCESS: Random Variables: Several RandomManjunath MohiteNoch keine Bewertungen
- Analog and Digital CommunicationDokument17 SeitenAnalog and Digital CommunicationeceelectroNoch keine Bewertungen
- Signal Integrity: by AsifDokument66 SeitenSignal Integrity: by Asifsrikanth chundiNoch keine Bewertungen
- 2-Classification of Signals and Systems-05!01!2024Dokument67 Seiten2-Classification of Signals and Systems-05!01!2024rupinsgmNoch keine Bewertungen
- 1-Signal Analysis 01 PDFDokument16 Seiten1-Signal Analysis 01 PDFAmanya Luka OliangNoch keine Bewertungen
- Principles of CommunicationDokument24 SeitenPrinciples of CommunicationJyothirmai GarapatiNoch keine Bewertungen
- Introduction To Discrete Time Signals and Systems - SBMA1402Dokument157 SeitenIntroduction To Discrete Time Signals and Systems - SBMA1402Kavya MamillaNoch keine Bewertungen
- Fill in The Blanks:: Mark Carlo Sanorjo Bscpe - 3BDokument3 SeitenFill in The Blanks:: Mark Carlo Sanorjo Bscpe - 3Bmark carlo SanorjoNoch keine Bewertungen
- Digital SignalDokument42 SeitenDigital SignalRuby ManauisNoch keine Bewertungen
- Elektromagnetik Kompatibiliti Signal SpectraDokument62 SeitenElektromagnetik Kompatibiliti Signal SpectrayushofNoch keine Bewertungen
- CT NotesDokument113 SeitenCT NotesAnonymous lt2LFZHNoch keine Bewertungen
- Sem 1Dokument135 SeitenSem 1Mega KnightNoch keine Bewertungen
- Digital Signal Processing: Dr. MuayadDokument18 SeitenDigital Signal Processing: Dr. MuayadAli KareemNoch keine Bewertungen
- Signal System ReviwDokument24 SeitenSignal System ReviwAhmed OsamaNoch keine Bewertungen
- Signal and Systems: Dr. Avinash Chandra Assistant Professor (Senior) SENSE, VIT VelloreDokument30 SeitenSignal and Systems: Dr. Avinash Chandra Assistant Professor (Senior) SENSE, VIT VelloreSathwik YadalamNoch keine Bewertungen
- University of Khartoum University of Khartoum: Ntroduction NtroductionDokument15 SeitenUniversity of Khartoum University of Khartoum: Ntroduction NtroductionHassan AhmedNoch keine Bewertungen
- LS NA Short CourseDokument62 SeitenLS NA Short CourseManuel GaytanNoch keine Bewertungen
- Unit 1 - Analog and Digital CommunicationDokument28 SeitenUnit 1 - Analog and Digital CommunicationNice DonNoch keine Bewertungen
- Data Communication and Networking: Mr. IMTIAZ ALI M.SC IT, M.Phil (Cont) Cell# 0344-8484072Dokument52 SeitenData Communication and Networking: Mr. IMTIAZ ALI M.SC IT, M.Phil (Cont) Cell# 0344-8484072Sardar SufyanNoch keine Bewertungen
- Analog and Digital SignalsDokument3 SeitenAnalog and Digital SignalsNisha DhamodeNoch keine Bewertungen
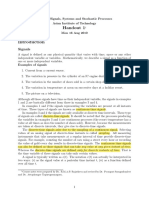
- Handout 1: SignalsDokument12 SeitenHandout 1: SignalsBryan YaranonNoch keine Bewertungen
- S & S 2 MarksDokument30 SeitenS & S 2 MarkspriyajegaNoch keine Bewertungen
- Unit 1 Physical LayerDokument86 SeitenUnit 1 Physical Layerbhavana16686Noch keine Bewertungen
- Signal and Production of Signal: Digital Signal (Figure 1b) Refers To MoreDokument4 SeitenSignal and Production of Signal: Digital Signal (Figure 1b) Refers To MoreDarren GegantinoNoch keine Bewertungen
- MT1 CSDokument5 SeitenMT1 CSSUDHARANI INTINoch keine Bewertungen
- CH. 1 SignalsDokument29 SeitenCH. 1 SignalsSohini ChakrabortyNoch keine Bewertungen
- Energies: Noise Reduction of Power Quality Measurements With Time-Frequency Depth AnalysisDokument19 SeitenEnergies: Noise Reduction of Power Quality Measurements With Time-Frequency Depth AnalysisEmir JusićNoch keine Bewertungen
- Section ADokument70 SeitenSection AAyaneNoch keine Bewertungen
- Mnmjec - Ec6303 Signals & SystemsDokument25 SeitenMnmjec - Ec6303 Signals & SystemsSonuNoch keine Bewertungen
- ELE 374 Lab ReportDokument34 SeitenELE 374 Lab Reportec09364100% (1)
- Unit-I Communication Com (Cum (Latin) "With" or "Together With") + Union (Latin) Union With or Union Together With. Introduction To CommunicationDokument25 SeitenUnit-I Communication Com (Cum (Latin) "With" or "Together With") + Union (Latin) Union With or Union Together With. Introduction To Communicationpriy@nciNoch keine Bewertungen
- Lecture2 Mech SUDokument20 SeitenLecture2 Mech SUNazeeh Abdulrhman AlbokaryNoch keine Bewertungen
- Thermal Oil Boiler Vega PDFDokument2 SeitenThermal Oil Boiler Vega PDFrafiradityaNoch keine Bewertungen
- Per g26 Pub 32704 Touchstone AssessmentQPHTMLMode1 32704O236 32704O236S10D1795 17060852160988057 JC1601372310008 32704O236S10D1795E1.html#Dokument37 SeitenPer g26 Pub 32704 Touchstone AssessmentQPHTMLMode1 32704O236 32704O236S10D1795 17060852160988057 JC1601372310008 32704O236S10D1795E1.html#Sandip pawarNoch keine Bewertungen
- The In-Situ Measurement of The Undrained Shear Strength of Clays Using The Field VaneDokument1 SeiteThe In-Situ Measurement of The Undrained Shear Strength of Clays Using The Field VaneLeo ChandraNoch keine Bewertungen
- Chap 9 Indices, Exponentials and Logarithms Part 1 PDFDokument44 SeitenChap 9 Indices, Exponentials and Logarithms Part 1 PDFArahNoch keine Bewertungen
- Applied III, Worksheet 1Dokument4 SeitenApplied III, Worksheet 1mintuwondeNoch keine Bewertungen
- Crop CircleDokument2 SeitenCrop CircledotionmoNoch keine Bewertungen
- Framo Cargo Pumps MaintenanceDokument6 SeitenFramo Cargo Pumps MaintenanceOsman ŞenerNoch keine Bewertungen
- 1 - Hand Tool Ergonomics - Tool DesignDokument51 Seiten1 - Hand Tool Ergonomics - Tool Designwandira_121Noch keine Bewertungen
- Ch4 Fluid KinematicsDokument30 SeitenCh4 Fluid Kinematicsa u khan100% (1)
- Dooms Day and Life After Death PDFDokument289 SeitenDooms Day and Life After Death PDFGhulam Mustafa100% (1)
- SETTLING VELOCITY 2.1 - Calculations of Sedimentation Velocity and Hindered Settling Rate of ParticlesDokument74 SeitenSETTLING VELOCITY 2.1 - Calculations of Sedimentation Velocity and Hindered Settling Rate of ParticlesSonu Singh100% (4)
- Review Module 24 Geotechnical Engineering 5 Part 2Dokument2 SeitenReview Module 24 Geotechnical Engineering 5 Part 2John Andre MarianoNoch keine Bewertungen
- Reactor Design For Cell GrothDokument33 SeitenReactor Design For Cell GrothErpin FebrianNoch keine Bewertungen
- AnimationDokument9 SeitenAnimationAruna AruchamiNoch keine Bewertungen
- Rieber Sealing in AmericaDokument10 SeitenRieber Sealing in Americaulloap*100% (1)
- Analysis of The Behaviour of Stainless Steel Bolted ConnectionsDokument11 SeitenAnalysis of The Behaviour of Stainless Steel Bolted ConnectionsSam SamouraNoch keine Bewertungen
- B. Sc. IC Semester III To VIDokument29 SeitenB. Sc. IC Semester III To VIJainam JoshiNoch keine Bewertungen
- Automatic Railway Gate Control by Using Microcontroller - 24 PagesDokument44 SeitenAutomatic Railway Gate Control by Using Microcontroller - 24 PagesSebastin AshokNoch keine Bewertungen
- Ferro CementDokument236 SeitenFerro Cementpbharadwaj545Noch keine Bewertungen
- A Comparative Research On Corrosion Behavior of A Standard, Crack-Free and Duplex Hard Chromium CoatingsDokument6 SeitenA Comparative Research On Corrosion Behavior of A Standard, Crack-Free and Duplex Hard Chromium CoatingsKarthi SundarNoch keine Bewertungen
- Varut Marius - Excel CCT Calculator From VIS Spectrum - LED 1 MaDokument441 SeitenVarut Marius - Excel CCT Calculator From VIS Spectrum - LED 1 MaVarut MariusNoch keine Bewertungen
- On Hidden Projection of Plackett Burman Design by Yashi PalDokument26 SeitenOn Hidden Projection of Plackett Burman Design by Yashi PalyashiNoch keine Bewertungen
- Hydrologic CycleDokument35 SeitenHydrologic CycleFachri JahriNoch keine Bewertungen
- MCQ-Metal Forming ProcessDokument16 SeitenMCQ-Metal Forming ProcessKunal Wagh67% (9)
- DIP Lecture 1&2 PDFDokument63 SeitenDIP Lecture 1&2 PDFAhmedNoch keine Bewertungen
- Chirimuuta. Outside ColorDokument262 SeitenChirimuuta. Outside Colorcrazijoe100% (2)
- DC 53 CatalogDokument4 SeitenDC 53 CatalogHonza MičkaNoch keine Bewertungen
- DEWA Regulations For Electrical Installations 2017 Edition PDFDokument135 SeitenDEWA Regulations For Electrical Installations 2017 Edition PDFakhilNoch keine Bewertungen
- Iso Dis 50006Dokument54 SeitenIso Dis 50006abimanyubawono100% (3)
- Speed Velocity-Physics IGCSE NotesDokument4 SeitenSpeed Velocity-Physics IGCSE Notesismun nadhifah100% (1)
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900Von EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900Noch keine Bewertungen
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionVon EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionBewertung: 5 von 5 Sternen5/5 (4)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsVon EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNoch keine Bewertungen
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsVon EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsNoch keine Bewertungen
- PHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZVon EverandPHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZNoch keine Bewertungen
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsVon EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsBewertung: 5 von 5 Sternen5/5 (1)
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityVon EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityBewertung: 5 von 5 Sternen5/5 (2)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNVon EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNBewertung: 5 von 5 Sternen5/5 (1)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamVon EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNoch keine Bewertungen
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringVon EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringBewertung: 5 von 5 Sternen5/5 (40)
- Azure Networking: Command Line Mastery From Beginner To ArchitectVon EverandAzure Networking: Command Line Mastery From Beginner To ArchitectNoch keine Bewertungen
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Von EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Noch keine Bewertungen
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Von EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Bewertung: 5 von 5 Sternen5/5 (2)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxVon EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxBewertung: 4.5 von 5 Sternen4.5/5 (67)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamVon EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamBewertung: 5 von 5 Sternen5/5 (1)
- Alcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsVon EverandAlcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsNoch keine Bewertungen
- Open Radio Access Network (O-RAN) Systems Architecture and DesignVon EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNoch keine Bewertungen
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationVon EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationBewertung: 5 von 5 Sternen5/5 (2)