Das könnte Ihnen auch gefallen
- Guía básica para la caracterización morfométrica de cuencas hidrográficasVon EverandGuía básica para la caracterización morfométrica de cuencas hidrográficasBewertung: 2 von 5 Sternen2/5 (5)
- Métodos BatimetricosDokument4 SeitenMétodos Batimetricosharlen ledezma vargasNoch keine Bewertungen
- BATIMETRIADokument17 SeitenBATIMETRIAVictor Machaca MamaniNoch keine Bewertungen
- Exposicion - Perfiles de AcerosDokument36 SeitenExposicion - Perfiles de AcerossamirNoch keine Bewertungen
- Batimetría PDFDokument27 SeitenBatimetría PDFnacho pop100% (1)
- BatimetríaDokument21 SeitenBatimetríaMarisela Amador D'GarciaNoch keine Bewertungen
- BATRIMETRÍADokument19 SeitenBATRIMETRÍAkellyNoch keine Bewertungen
- BatímetriaDokument45 SeitenBatímetriaHernan Edwin Chavez Pedraza80% (5)
- Informe BATIMETRIADokument27 SeitenInforme BATIMETRIAArmando Alvarez Cardenas100% (1)
- BatimetriaDokument45 SeitenBatimetriaEder Cárdenas GodoyNoch keine Bewertungen
- BATIMETRIADokument15 SeitenBATIMETRIASaul Max Huayta AguilarNoch keine Bewertungen
- BATIMETRÍADokument17 SeitenBATIMETRÍAantuanedNoch keine Bewertungen
- Declaracion de Impacto Ambiental DIA - HUACAYBAMBADokument149 SeitenDeclaracion de Impacto Ambiental DIA - HUACAYBAMBAsamirNoch keine Bewertungen
- Tipos de BatimetriaDokument14 SeitenTipos de BatimetriaguillermoNoch keine Bewertungen
- Tarea 3 - HidrologiaDokument7 SeitenTarea 3 - HidrologiaHanler JimenezNoch keine Bewertungen
- Trastornos de La Consciencia y La AtencionDokument31 SeitenTrastornos de La Consciencia y La AtencionValeria CalderónNoch keine Bewertungen
- Batimetria, Tipos de Sondeo y Medicion de CorrienteDokument6 SeitenBatimetria, Tipos de Sondeo y Medicion de CorrienteUlises SaidNoch keine Bewertungen
- Ondas SismicasDokument18 SeitenOndas SismicassamirNoch keine Bewertungen
- Batimetria TrabajoDokument16 SeitenBatimetria TrabajoR Rymmer Rxlc ApaxNoch keine Bewertungen
- Practica 2 TCRDokument11 SeitenPractica 2 TCRanaaluma282Noch keine Bewertungen
- BatimetriaDokument30 SeitenBatimetriaalupollo100% (3)
- BatimetriaDokument33 SeitenBatimetriaMelvin Hallasi83% (6)
- Topografia de Levantamiento BatimetricoDokument21 SeitenTopografia de Levantamiento BatimetricoFabiola Mendoza ParedesNoch keine Bewertungen
- Metodos de BatimetriaDokument11 SeitenMetodos de BatimetriaGerardo ChavarríaNoch keine Bewertungen
- Batimetria Maritima - Frank CabanillasDokument18 SeitenBatimetria Maritima - Frank CabanillasRenzo Vidalon NoriegasNoch keine Bewertungen
- Batimetria Final 1Dokument32 SeitenBatimetria Final 1Goyo Maita VillavicencioNoch keine Bewertungen
- Batimetria 1Dokument31 SeitenBatimetria 1Bryan Rafael Carrion ManotupaNoch keine Bewertungen
- BATIMETRIAPPTDokument40 SeitenBATIMETRIAPPTESTEFANY BRISETTE CELIS COTRINANoch keine Bewertungen
- Métodos de batimetría a través de la historiaDokument19 SeitenMétodos de batimetría a través de la historiaEmilio MallquiNoch keine Bewertungen
- BATIMETRIA: MEDICIÓN DE PROFUNDIDADES MARINASDokument30 SeitenBATIMETRIA: MEDICIÓN DE PROFUNDIDADES MARINASMilagros Arrieta RodriguezNoch keine Bewertungen
- BatimetriaDokument13 SeitenBatimetriaJUAN LUIS TUCTO CHAVEZNoch keine Bewertungen
- Batimetría y métodos topográficosDokument27 SeitenBatimetría y métodos topográficosAlex Fabian SilvaNoch keine Bewertungen
- BATIMETRÍADokument13 SeitenBATIMETRÍAFredy Mantilla RoldanNoch keine Bewertungen
- Batimetria Trabajo TerminadoDokument16 SeitenBatimetria Trabajo TerminadoJean Valverde GarciaNoch keine Bewertungen
- BATIMETRIADokument19 SeitenBATIMETRIAJosé Fernando CarmonaNoch keine Bewertungen
- Introducción a la batimetría: métodos y aplicaciones de la topografía submarinaDokument22 SeitenIntroducción a la batimetría: métodos y aplicaciones de la topografía submarinaTom Sanchez Diaz100% (1)
- Trabajo de InvestigacionDokument17 SeitenTrabajo de InvestigacionCARLOS ORDOÑEZNoch keine Bewertungen
- Levantamientos Batimétricos 2Dokument55 SeitenLevantamientos Batimétricos 2Goyo Maita VillavicencioNoch keine Bewertungen
- BatimetriaDokument15 SeitenBatimetrianelly quispe100% (1)
- BatimetriaDokument30 SeitenBatimetriaRonald Yoshiro TorresNoch keine Bewertungen
- Topografía y Delimitación de Lalínea de CostaDokument10 SeitenTopografía y Delimitación de Lalínea de CostarocioNoch keine Bewertungen
- Batimetría: métodos de levantamiento de fondos subacuáticosDokument45 SeitenBatimetría: métodos de levantamiento de fondos subacuáticosClaudia Boada FelipaNoch keine Bewertungen
- BATIMETRIADokument3 SeitenBATIMETRIAGILMER JARA VASQUEZNoch keine Bewertungen
- Levantamientos batimétricos: métodos topográficosDokument45 SeitenLevantamientos batimétricos: métodos topográficosJulio Pacco QuispeNoch keine Bewertungen
- Batimetria FinalDokument30 SeitenBatimetria FinalLeonardo Guevara Solis100% (1)
- Calculo Hidraulico Rio TenechacoDokument14 SeitenCalculo Hidraulico Rio TenechacoMar MOmlNoch keine Bewertungen
- Teoria de BatimetriaDokument45 SeitenTeoria de BatimetriaALNAMA2011Noch keine Bewertungen
- Topografia 13 Levantamientos BatimétricosDokument45 SeitenTopografia 13 Levantamientos BatimétricosManu San Clemente100% (2)
- La Batimetría y GPS en Obras Viales PDFDokument6 SeitenLa Batimetría y GPS en Obras Viales PDFRocio UchasaraNoch keine Bewertungen
- Levantamiento Batimetrico UAPDokument47 SeitenLevantamiento Batimetrico UAPJose Washington HTNoch keine Bewertungen
- Batimetria EscalonadoDokument22 SeitenBatimetria EscalonadoLeidy Coral YMNoch keine Bewertungen
- Mareas PiscoDokument6 SeitenMareas PiscoEduardo SierraNoch keine Bewertungen
- Topografia HoyDokument16 SeitenTopografia HoyJulio Pacco QuispeNoch keine Bewertungen
- Batimetría: medición de profundidades marinas y fluvialesDokument24 SeitenBatimetría: medición de profundidades marinas y fluvialesMarisol AguilarNoch keine Bewertungen
- Multiboyas, Batimetría, MetoceánicaDokument10 SeitenMultiboyas, Batimetría, MetoceánicaGustavo MaldonadoNoch keine Bewertungen
- Batrimetría en PuentesDokument9 SeitenBatrimetría en PuentesBrandon FloresNoch keine Bewertungen
- Exploración marina por métodos geofísicosDokument17 SeitenExploración marina por métodos geofísicosBen AguilarNoch keine Bewertungen
- Prospección aguas subterráneas métodos geofísicosDokument4 SeitenProspección aguas subterráneas métodos geofísicosJuan Hrndz'Noch keine Bewertungen
- Altimetria Satelital y Mareografos - 3Dokument15 SeitenAltimetria Satelital y Mareografos - 3MSc Luis JimenezNoch keine Bewertungen
- Diapositivas Hidrologia - Grupo 2Dokument37 SeitenDiapositivas Hidrologia - Grupo 2Roberto MegoNoch keine Bewertungen
- Medicion Nivel MedioDokument5 SeitenMedicion Nivel MedioAlex MoralesNoch keine Bewertungen
- Levantamiento HidrográficoDokument9 SeitenLevantamiento HidrográficoRoberth Josue Lita100% (1)
- El banco de las ánimas: valoración de su biodiversidadVon EverandEl banco de las ánimas: valoración de su biodiversidadNoch keine Bewertungen
- Undrained seismic response of underground structuresVon EverandUndrained seismic response of underground structuresNoch keine Bewertungen
- Sifon InvertidoDokument7 SeitenSifon Invertidosamir0% (1)
- Comportamiento en Altas TemperaturasDokument14 SeitenComportamiento en Altas TemperaturassamirNoch keine Bewertungen
- FLEXIÓN PURA (Final)Dokument29 SeitenFLEXIÓN PURA (Final)samirNoch keine Bewertungen
- Tipos de Estructuras de Acero 2Dokument5 SeitenTipos de Estructuras de Acero 2samirNoch keine Bewertungen
- Tipos de Estructuras de Acero 2Dokument5 SeitenTipos de Estructuras de Acero 2samirNoch keine Bewertungen
- Historia de Las Estructuras de AceroDokument14 SeitenHistoria de Las Estructuras de AcerosamirNoch keine Bewertungen
- E-050 - RM 406-2018-ViviendaDokument47 SeitenE-050 - RM 406-2018-ViviendaJhomaNoch keine Bewertungen
- TV 01Dokument9 SeitenTV 01samirNoch keine Bewertungen
- Ventajas y Desventajas AceroDokument5 SeitenVentajas y Desventajas AcerosamirNoch keine Bewertungen
- DIFRACCIONDokument35 SeitenDIFRACCIONsamirNoch keine Bewertungen
- TV 01 PDFDokument1 SeiteTV 01 PDFsamirNoch keine Bewertungen
- Tig 01. AvanceDokument14 SeitenTig 01. AvancesamirNoch keine Bewertungen
- Resultados Admisión UNHV 2020Dokument98 SeitenResultados Admisión UNHV 2020Oxy荷極高Noch keine Bewertungen
- Propiedades Hidraulicos Del Suelo PDFDokument54 SeitenPropiedades Hidraulicos Del Suelo PDFmanuel el condeNoch keine Bewertungen
- Resultados Admisión UNHV 2020Dokument98 SeitenResultados Admisión UNHV 2020Oxy荷極高Noch keine Bewertungen
- 01presupuesto Ie Ciudad de DiosDokument8 Seiten01presupuesto Ie Ciudad de DiossamirNoch keine Bewertungen
- Corte DirectoDokument12 SeitenCorte DirectosamirNoch keine Bewertungen
- 01presupuesto Ie Ciudad de DiosDokument8 Seiten01presupuesto Ie Ciudad de DiossamirNoch keine Bewertungen
- 01presupuesto Ie Ciudad de DiosDokument8 Seiten01presupuesto Ie Ciudad de DiossamirNoch keine Bewertungen
- Distribucion ModelDokument1 SeiteDistribucion ModelsamirNoch keine Bewertungen
- Comprobacion de TerzaghiDokument7 SeitenComprobacion de TerzaghisamirNoch keine Bewertungen
- Elementos de HidraulicaDokument11 SeitenElementos de HidraulicasamirNoch keine Bewertungen
- Trabajo de Planeamiento Urbano RegionalDokument21 SeitenTrabajo de Planeamiento Urbano RegionalsamirNoch keine Bewertungen
- Plan de Manejo Ambiental 1Dokument16 SeitenPlan de Manejo Ambiental 1samirNoch keine Bewertungen
- Abastecimiento de Agua y Alcantarillado - VierendelDokument149 SeitenAbastecimiento de Agua y Alcantarillado - VierendelLucio AlvarezNoch keine Bewertungen
- Informe DPLDokument18 SeitenInforme DPLsamirNoch keine Bewertungen
- Evaluacion Del Cuidado de ManosDokument5 SeitenEvaluacion Del Cuidado de ManosAlberta Martinez Gomez100% (1)
- Rugosidad y Tolerancias GeometricasDokument18 SeitenRugosidad y Tolerancias GeometricasManuel GeronimoNoch keine Bewertungen
- Trastornos psiquiátricos y psicofarmacologíaDokument5 SeitenTrastornos psiquiátricos y psicofarmacologíaYony FCqNoch keine Bewertungen
- Balance HidroelectrolíticoDokument14 SeitenBalance HidroelectrolíticoEve AcevedoNoch keine Bewertungen
- Análisis de Viento KGFDokument4 SeitenAnálisis de Viento KGFAndres Camilo Zura TimanaNoch keine Bewertungen
- ¿Niño o Niña El Ser Humano Posee 46 Cromosomas en Cada CelulabDokument162 Seiten¿Niño o Niña El Ser Humano Posee 46 Cromosomas en Cada Celulabe5490626Noch keine Bewertungen
- Volcanes activos en HondurasDokument6 SeitenVolcanes activos en HondurasDilenia0% (1)
- Un Discurso Sobre Las Ciencias Ensayo (Autoguardado)Dokument12 SeitenUn Discurso Sobre Las Ciencias Ensayo (Autoguardado)alejandro hernandezNoch keine Bewertungen
- Ficha-Tecnica-policarbonato ALVEOLAR - Glanze 2019 PDFDokument2 SeitenFicha-Tecnica-policarbonato ALVEOLAR - Glanze 2019 PDFEdwin Ronald ChukeNoch keine Bewertungen
- Los Tipos de EmprendimientoDokument7 SeitenLos Tipos de EmprendimientoLu Jeny OLIVEROS TRIANANoch keine Bewertungen
- Discusión de ResultadosDokument2 SeitenDiscusión de ResultadosSergio Geovany CoroyNoch keine Bewertungen
- Nociones Basicas ModificadoDokument7 SeitenNociones Basicas ModificadoLawrence PinoNoch keine Bewertungen
- Plantilla Informe Técnico - Working Paper - Consultoria EmpresarialDokument32 SeitenPlantilla Informe Técnico - Working Paper - Consultoria Empresarialkelly yepesNoch keine Bewertungen
- Actividad #2 - Buenas Practicas de AlmacenamientoDokument3 SeitenActividad #2 - Buenas Practicas de AlmacenamientoDarinel BatistaNoch keine Bewertungen
- Análisis de aceites vegetales comestiblesDokument2 SeitenAnálisis de aceites vegetales comestiblesLady Millones100% (1)
- Asi Somos El Cuerpo Humano F22 - 2023Dokument8 SeitenAsi Somos El Cuerpo Humano F22 - 2023Edgar GuaitaNoch keine Bewertungen
- 4 Memoria de Internado de Enfermeria 2020Dokument112 Seiten4 Memoria de Internado de Enfermeria 2020Ketty Laura VilcapomaNoch keine Bewertungen
- EX2022Dokument12 SeitenEX2022Hubert HuancaNoch keine Bewertungen
- 2dogrado ComputacionDokument86 Seiten2dogrado ComputacionAlfredo HernandezNoch keine Bewertungen
- Fragmentos de Memoria. Profesores y luchas de la UTDokument374 SeitenFragmentos de Memoria. Profesores y luchas de la UTdaniel garcíaNoch keine Bewertungen
- Volvo VM 8x4R WB5150 - V10Dokument2 SeitenVolvo VM 8x4R WB5150 - V10fabian.sr1900Noch keine Bewertungen
- Ejemplo Formato Informe Medio de Verificacion FotografiasDokument6 SeitenEjemplo Formato Informe Medio de Verificacion FotografiasAdonis AndradeNoch keine Bewertungen
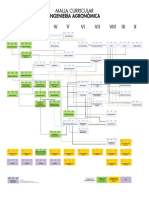
- Malla Curricular Ing Agronómica UNALDokument1 SeiteMalla Curricular Ing Agronómica UNALkmigeNoch keine Bewertungen
- 1.problema1 Velocidad MediaDokument15 Seiten1.problema1 Velocidad Mediasilvia moreyraNoch keine Bewertungen
- Basf Masterair 920 TdsDokument4 SeitenBasf Masterair 920 TdsBracilides Mamani ArizaNoch keine Bewertungen
- Primera Practica Calificada-UtpDokument7 SeitenPrimera Practica Calificada-UtpJuan Chavarria AsparrinNoch keine Bewertungen
- 1SFN030300R1000 vm19Dokument3 Seiten1SFN030300R1000 vm19OMAR QUISBERTNoch keine Bewertungen
- Diseño de RedesDokument35 SeitenDiseño de RedesMiguel DominguezNoch keine Bewertungen