Das könnte Ihnen auch gefallen
- Differential Forms on Electromagnetic NetworksVon EverandDifferential Forms on Electromagnetic NetworksBewertung: 4 von 5 Sternen4/5 (1)
- Slater 1998Dokument9 SeitenSlater 1998Hans100% (1)
- Lemur Guitarbot: Midi Robotic String Instrument: Eric Singer Kevin Larke David BianciardiDokument4 SeitenLemur Guitarbot: Midi Robotic String Instrument: Eric Singer Kevin Larke David BianciardiMaksym TrianovNoch keine Bewertungen
- Calculation of Resonant Frequency For A Microstrip Antenna With Vertical Slots Using Applying Adaptive Network-Based Fuzzy Inference SystemDokument12 SeitenCalculation of Resonant Frequency For A Microstrip Antenna With Vertical Slots Using Applying Adaptive Network-Based Fuzzy Inference SystemChinaski BukowskiNoch keine Bewertungen
- Dielectric ResonatorsDokument4 SeitenDielectric ResonatorsKundan SumanNoch keine Bewertungen
- Electronics: Design of A Memristor-Based Digital To Analog Converter (DAC)Dokument17 SeitenElectronics: Design of A Memristor-Based Digital To Analog Converter (DAC)Venkata KishoreNoch keine Bewertungen
- Design and Manufacturing of Iris Waveguide Filters For Satellite CommunicationDokument6 SeitenDesign and Manufacturing of Iris Waveguide Filters For Satellite CommunicationTELKOMNIKANoch keine Bewertungen
- Teered Microstrip Phased Array Antennas PDFDokument5 SeitenTeered Microstrip Phased Array Antennas PDFHAPURNoch keine Bewertungen
- English For Electrical Engineering-GarnetDokument136 SeitenEnglish For Electrical Engineering-GarnetAstralissNoch keine Bewertungen
- Synthesis of Symmetrical Branch-Guide Directional Couplers: Ralph Levy, Larry F. LindDokument10 SeitenSynthesis of Symmetrical Branch-Guide Directional Couplers: Ralph Levy, Larry F. LindAlexander SarafovNoch keine Bewertungen
- NR 311701 Microwave EngineeringDokument7 SeitenNR 311701 Microwave EngineeringSrinivasa Rao GNoch keine Bewertungen
- Applied Sciences: Real-Time Guitar Amplifier Emulation With Deep LearningDokument18 SeitenApplied Sciences: Real-Time Guitar Amplifier Emulation With Deep LearningrieriticoNoch keine Bewertungen
- 2021IEEE57n2a5300305 - Development of A Broad Bandwidth Helmholtz Coil For Biomagnetic ApplicationDokument5 Seiten2021IEEE57n2a5300305 - Development of A Broad Bandwidth Helmholtz Coil For Biomagnetic Applicationf111142151Noch keine Bewertungen
- NR-220403-EM Waves & Transmission LinesDokument8 SeitenNR-220403-EM Waves & Transmission LinesSrinivasa Rao GNoch keine Bewertungen
- Theory of Operation For Momentum: The Method of Moments TechnologyDokument11 SeitenTheory of Operation For Momentum: The Method of Moments TechnologyMohammad MolanzadehNoch keine Bewertungen
- Pavan 2015 RecDokument5 SeitenPavan 2015 RecFathima Thasleema NNoch keine Bewertungen
- A Novel Dual Frequency Triangular Microstrip Patch Antenna With One Slot PDFDokument3 SeitenA Novel Dual Frequency Triangular Microstrip Patch Antenna With One Slot PDFGECM85Noch keine Bewertungen
- A Fully Hardware-Based Memristive Multilayer Neural Network: Research ArticleDokument9 SeitenA Fully Hardware-Based Memristive Multilayer Neural Network: Research ArticleZhanzhi LiuNoch keine Bewertungen
- Internal Noise Reduction From Dependent Signal Mixtures Using Microphones and A Piezoelectric Device Under Blind ConditionDokument11 SeitenInternal Noise Reduction From Dependent Signal Mixtures Using Microphones and A Piezoelectric Device Under Blind ConditionAfter DarkNoch keine Bewertungen
- Simulation Analysis of Dual Band Microstrip Antenna Strain Sensor Based On RFIDDokument3 SeitenSimulation Analysis of Dual Band Microstrip Antenna Strain Sensor Based On RFIDMagno MonteiroNoch keine Bewertungen
- Microstrip AntennasDokument13 SeitenMicrostrip AntennasIgor CarneiroNoch keine Bewertungen
- License AgreementDokument6 SeitenLicense AgreementdioumbNoch keine Bewertungen
- Simulation Study On Insertion and Return Loss of Planar Transmission Lines For Different Dielectric SubstratesDokument8 SeitenSimulation Study On Insertion and Return Loss of Planar Transmission Lines For Different Dielectric SubstratesBeeresha R SNoch keine Bewertungen
- MEMS Capacitive Microphones: Acoustical, Electrical, and Hidden Thermal-Related IssuesDokument9 SeitenMEMS Capacitive Microphones: Acoustical, Electrical, and Hidden Thermal-Related IssuessivakumarNoch keine Bewertungen
- CAD Cavity Model Analysis of High TC Superconducting Rectangular Patch Printed On Anisotropic SubstratesDokument4 SeitenCAD Cavity Model Analysis of High TC Superconducting Rectangular Patch Printed On Anisotropic SubstratesHoucine HoucineNoch keine Bewertungen
- 108 MohanDokument10 Seiten108 MohanRECEP BAŞNoch keine Bewertungen
- Analysis of Cable Structures: (Receiwd 15 June 1978Dokument9 SeitenAnalysis of Cable Structures: (Receiwd 15 June 1978Andrés DenisNoch keine Bewertungen
- FDGGDokument6 SeitenFDGGabhishekpaikrayNoch keine Bewertungen
- Artificial Neural Networks Applied To The Design of Microstrip AntennasDokument5 SeitenArtificial Neural Networks Applied To The Design of Microstrip AntennasMichał BubakNoch keine Bewertungen
- Multi-Band Operation of A Compact H-Shaped Microstrip AntennaDokument5 SeitenMulti-Band Operation of A Compact H-Shaped Microstrip AntennaDaniel CreedNoch keine Bewertungen
- Epjconf mnps2018 02002Dokument8 SeitenEpjconf mnps2018 02002Chintu VamNoch keine Bewertungen
- Bow Tie Microstrip Antenna DesignDokument5 SeitenBow Tie Microstrip Antenna DesignMU Strongest ChannelNoch keine Bewertungen
- So So Is: E GHZ GHZDokument2 SeitenSo So Is: E GHZ GHZThiripurasundari DNoch keine Bewertungen
- Microstrip - AntennaShape Grammar - MuscatZammitDokument22 SeitenMicrostrip - AntennaShape Grammar - MuscatZammitMurthyNoch keine Bewertungen
- 7 2 10Y Qiu PDFDokument5 Seiten7 2 10Y Qiu PDFfakher hamoucheNoch keine Bewertungen
- Microstrip Cascade Trisection FilterDokument3 SeitenMicrostrip Cascade Trisection FilterRasoul jafari sharif abadiNoch keine Bewertungen
- A Computational Modelling of Micro Strip Patch Antenna and Its Solution by RDTMDokument5 SeitenA Computational Modelling of Micro Strip Patch Antenna and Its Solution by RDTMmurthy tataNoch keine Bewertungen
- Finite ElementsDokument5 SeitenFinite ElementsworldsailorNoch keine Bewertungen
- Sensors 12 03587 PDFDokument18 SeitenSensors 12 03587 PDFMuhammet AteşNoch keine Bewertungen
- Dual Directional Coupler Design Duroid 5880Dokument5 SeitenDual Directional Coupler Design Duroid 5880PaulNoch keine Bewertungen
- International Journal of Electronics and Communications: Junwei Sun, Xiao Xiao, Qinfei Yang, Peng Liu, Yanfeng WangDokument12 SeitenInternational Journal of Electronics and Communications: Junwei Sun, Xiao Xiao, Qinfei Yang, Peng Liu, Yanfeng WangSohan G NaikNoch keine Bewertungen
- COIL Puskarczyk PaperDokument7 SeitenCOIL Puskarczyk PaperAnonymous OARSwGsNoch keine Bewertungen
- Elec2228 201819 02 Elec2228w1Dokument7 SeitenElec2228 201819 02 Elec2228w1Jennie HsinNoch keine Bewertungen
- Sound Source Reconstructions Using A Microphone Array: Articles You May Be Interested inDokument6 SeitenSound Source Reconstructions Using A Microphone Array: Articles You May Be Interested inedabank4712Noch keine Bewertungen
- Andres PaperDokument7 SeitenAndres PaperRoque Rubén AndrésNoch keine Bewertungen
- Air-Filled Stacked Patch AntennaDokument4 SeitenAir-Filled Stacked Patch AntennaMadhav SainiNoch keine Bewertungen
- Power - System - Lab - EinsteinDokument57 SeitenPower - System - Lab - EinsteinAnbalaganNoch keine Bewertungen
- Designing of Microstrip Patch Antenna For Bluetooth ApplicationsDokument4 SeitenDesigning of Microstrip Patch Antenna For Bluetooth Applicationsmahjoubi RabieNoch keine Bewertungen
- Convention Paper 10542: Audio Engineering SocietyDokument10 SeitenConvention Paper 10542: Audio Engineering SocietyCsNoch keine Bewertungen
- Specialized Routing ProblemsDokument7 SeitenSpecialized Routing Problemsalbert einsteinNoch keine Bewertungen
- D59988fa PDFDokument13 SeitenD59988fa PDFAlagu MurugesanNoch keine Bewertungen
- Advanced Computational Tools For Phased Array Antenna ApplicationsDokument5 SeitenAdvanced Computational Tools For Phased Array Antenna Applicationsemanuel guillauminNoch keine Bewertungen
- Compact Triple-Mode Filter Based On Quarter-Mode Substrate Integrated WaveguideDokument9 SeitenCompact Triple-Mode Filter Based On Quarter-Mode Substrate Integrated WaveguideHüseyin Nuri GülmezNoch keine Bewertungen
- Real-Time Acoustics Simulation Using Mesh-Tracing: January 2003Dokument5 SeitenReal-Time Acoustics Simulation Using Mesh-Tracing: January 2003Bert SchiettecatteNoch keine Bewertungen
- Analysis of The Resonator Element in Different Positions in The Circular Patch Microstrip AntennaDokument14 SeitenAnalysis of The Resonator Element in Different Positions in The Circular Patch Microstrip AntennaAfrican LOVENoch keine Bewertungen
- Corrected ConferenceDokument5 SeitenCorrected ConferenceSarath KumarNoch keine Bewertungen
- Gruszczynski 2006Dokument7 SeitenGruszczynski 2006moraeunwprqphslndfNoch keine Bewertungen
- Winding 2Dokument6 SeitenWinding 2jae hak kimNoch keine Bewertungen
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Von EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Bewertung: 4.5 von 5 Sternen4.5/5 (5)
- List of Tools For AutomotiveDokument4 SeitenList of Tools For AutomotiveGilbert MendozaNoch keine Bewertungen
- How To Call - and Answer - A CQDokument22 SeitenHow To Call - and Answer - A CQMike HammondsNoch keine Bewertungen
- Large Format Line ArraysDokument2 SeitenLarge Format Line ArraysValter Pereira da SilvaNoch keine Bewertungen
- Manual Gerador FY6900Dokument49 SeitenManual Gerador FY6900Claudio RodriguesNoch keine Bewertungen
- Cyble Sensor ATEX Brochure EnglishDokument2 SeitenCyble Sensor ATEX Brochure EnglishjoejondNoch keine Bewertungen
- Alps MD-1300-c ManualDokument51 SeitenAlps MD-1300-c Manualjbv01Noch keine Bewertungen
- ACS 2000 4 KV: Motor Temperature Supervision InformationDokument6 SeitenACS 2000 4 KV: Motor Temperature Supervision InformationJean Carlos da SilvaNoch keine Bewertungen
- Electronic Music - Systems, Techniques and ControlsDokument281 SeitenElectronic Music - Systems, Techniques and Controlskuatrovich100% (1)
- Sony Hdr-cx550 Xr550 Level-2 Ver-1.0 SMDokument51 SeitenSony Hdr-cx550 Xr550 Level-2 Ver-1.0 SMVoldemarNoch keine Bewertungen
- Technical Specification ALLGAIER - Laparascopy For GYNDokument6 SeitenTechnical Specification ALLGAIER - Laparascopy For GYNJimmyNoch keine Bewertungen
- Data Dorado3 Laser Radiotherapy enDokument2 SeitenData Dorado3 Laser Radiotherapy enjackxrdNoch keine Bewertungen
- CT Requirement For MicomsDokument50 SeitenCT Requirement For Micomsjaved shaikh chaandNoch keine Bewertungen
- Lecture Notes On Quantum Mechanics Multi Electron SystemsDokument14 SeitenLecture Notes On Quantum Mechanics Multi Electron Systemsliv2luvNoch keine Bewertungen
- Pierlite Led PanelsDokument4 SeitenPierlite Led PanelsAzeemNoch keine Bewertungen
- NE100, NE101 Spectra Theodolite Data SheetDokument2 SeitenNE100, NE101 Spectra Theodolite Data Sheetbbutros_317684077Noch keine Bewertungen
- Windows Shell Command To Uninstall in Built Microsoft Store Apps PDFDokument7 SeitenWindows Shell Command To Uninstall in Built Microsoft Store Apps PDFenakta13Noch keine Bewertungen
- Non-Contact Infrared Thermometers Operating Manual: Downloaded From Manuals Search EngineDokument16 SeitenNon-Contact Infrared Thermometers Operating Manual: Downloaded From Manuals Search EngineOmar RodriguezNoch keine Bewertungen
- M.tech Advanced Digital Signal ProcessingDokument1 SeiteM.tech Advanced Digital Signal ProcessingsrinivasNoch keine Bewertungen
- WEG CFW 08 Addendum To The Users Manual 500 600v Power Supply 0899.5584 4.2x Manual EnglishDokument12 SeitenWEG CFW 08 Addendum To The Users Manual 500 600v Power Supply 0899.5584 4.2x Manual EnglishAmbrose NaldrettNoch keine Bewertungen
- Manual PhonicDokument46 SeitenManual Phonicnemartin0% (1)
- BD SFG Mason S RuleDokument37 SeitenBD SFG Mason S Rulesabbir hossainNoch keine Bewertungen
- mpx4250 Datasheet PDFDokument8 Seitenmpx4250 Datasheet PDFAdrian SalvadorNoch keine Bewertungen
- ABB Protection Application Book PDFDokument370 SeitenABB Protection Application Book PDFVishnu Shanker100% (2)
- Feeder Protection Relay FormatDokument4 SeitenFeeder Protection Relay FormatUmapathiNoch keine Bewertungen
- IEO Syllabus Third Year-Electronics and Communications EngineeringDokument2 SeitenIEO Syllabus Third Year-Electronics and Communications EngineeringAkhil AaronNoch keine Bewertungen
- Uninterruptible Power Supply UPS: Protect 5.31/xxx-480-220-120 10 kVA - 120 kVADokument61 SeitenUninterruptible Power Supply UPS: Protect 5.31/xxx-480-220-120 10 kVA - 120 kVAMIGUEL ALVARO BLASCO MARTINEZNoch keine Bewertungen
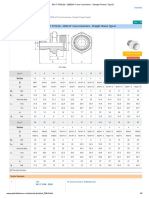
- GB - T 3733 (B) - 200824° Cone Connectors - Straight Thread, Type BDokument3 SeitenGB - T 3733 (B) - 200824° Cone Connectors - Straight Thread, Type BEr.Amritpal SinghNoch keine Bewertungen
- Spectralert® Series: Horns, Strobes, and Horn/StrobesDokument4 SeitenSpectralert® Series: Horns, Strobes, and Horn/Strobesmechengineer3Noch keine Bewertungen
- On The Spot Courier Services Business ReportDokument7 SeitenOn The Spot Courier Services Business Reportapi-253540656Noch keine Bewertungen