Das könnte Ihnen auch gefallen
- Module 1 & 2 (Tracking Radar) PDFDokument52 SeitenModule 1 & 2 (Tracking Radar) PDFDeeksha NaiduNoch keine Bewertungen
- Lecture11 PDFDokument12 SeitenLecture11 PDFSameer NarsapurNoch keine Bewertungen
- Universiti Kuala Lumpur: (Malaysian Institute of Aviation Technology)Dokument11 SeitenUniversiti Kuala Lumpur: (Malaysian Institute of Aviation Technology)Syahmi Amir HamzahNoch keine Bewertungen
- Xase18 NS U3&4Dokument26 SeitenXase18 NS U3&4Vigha Omnica IyerNoch keine Bewertungen
- Terrain Navigation Bayesian: UsingDokument8 SeitenTerrain Navigation Bayesian: UsingjayNoch keine Bewertungen
- Aircraft Electrical & Electronic Systems What Is Avionics?: ADF DME EAT EfisDokument8 SeitenAircraft Electrical & Electronic Systems What Is Avionics?: ADF DME EAT EfisArslanKhanNoch keine Bewertungen
- Aircraft Inertial Navigation Systems 1Dokument176 SeitenAircraft Inertial Navigation Systems 1azarodeenNoch keine Bewertungen
- Q.1 To Study Communication Guiding SystemDokument19 SeitenQ.1 To Study Communication Guiding SystemVijendra SolankiNoch keine Bewertungen
- List of NavaidsDokument14 SeitenList of Navaidstharesh nicholasNoch keine Bewertungen
- Aircraft NavigationDokument16 SeitenAircraft NavigationHoussam El HassaniNoch keine Bewertungen
- Fundamentals of Air NavigationDokument30 SeitenFundamentals of Air NavigationHaider Ali BabaNoch keine Bewertungen
- Sensors 3 WithfigsDokument42 SeitenSensors 3 WithfigsXkalligerNoch keine Bewertungen
- Report in Ece311 StudentsDokument6 SeitenReport in Ece311 Studentsapi-273867737Noch keine Bewertungen
- Fully Automatic Taxiing, Takeoff and Landing of A UAV Based On A Single-Antenna GNSS ReceiverDokument6 SeitenFully Automatic Taxiing, Takeoff and Landing of A UAV Based On A Single-Antenna GNSS Receiverbang nguyen dinhNoch keine Bewertungen
- Dead ReckoningDokument48 SeitenDead ReckoningAntonioNoch keine Bewertungen
- 6245784Dokument219 Seiten6245784Angijad MesicNoch keine Bewertungen
- AE4-393: Avionics Exam Solutions 2007-10-29: 1. Communication, Navigation, SurveillanceDokument9 SeitenAE4-393: Avionics Exam Solutions 2007-10-29: 1. Communication, Navigation, SurveillancesathishNoch keine Bewertungen
- Radar 3Dokument33 SeitenRadar 3Akhil RajuNoch keine Bewertungen
- Network ( (Autosaved) MPCTDokument37 SeitenNetwork ( (Autosaved) MPCTVijendra SolankiNoch keine Bewertungen
- Navigation SystemsDokument27 SeitenNavigation SystemsCHIMPAYE JOSEPHNoch keine Bewertungen
- Altitude and Its MeasurementDokument7 SeitenAltitude and Its MeasurementinnobobothebossNoch keine Bewertungen
- Screenshot 2024-02-04 at 3.54.17 PMDokument95 SeitenScreenshot 2024-02-04 at 3.54.17 PMSandhya BiradarNoch keine Bewertungen
- 5 - Navigation Systems-FinalDokument357 Seiten5 - Navigation Systems-FinalLuiz Fernando T. Vargas100% (1)
- Doppler NavigationDokument21 SeitenDoppler NavigationRe-ownRe-ve100% (3)
- Navigational Aids: Engr. Carlito S. AnatanDokument88 SeitenNavigational Aids: Engr. Carlito S. AnatanLuelsonCordovaDeclaradorNoch keine Bewertungen
- Automatic Navigation SystemsDokument25 SeitenAutomatic Navigation SystemsMacky MalupangueNoch keine Bewertungen
- Lecture Notes Aircraft Navigation (Lecture 1,2)Dokument9 SeitenLecture Notes Aircraft Navigation (Lecture 1,2)VIRAJ HADKARNoch keine Bewertungen
- Lesson 2Dokument37 SeitenLesson 2Hồ Vĩnh ThêmNoch keine Bewertungen
- Navigation SystemsDokument61 SeitenNavigation SystemsmhilaldevNoch keine Bewertungen
- Navstar Sat - Radio Nav - System PDFDokument25 SeitenNavstar Sat - Radio Nav - System PDFKiril MarinovNoch keine Bewertungen
- Unit 4Dokument60 SeitenUnit 4MachoNoch keine Bewertungen
- Q.1 To Study Communication Guiding SystemDokument19 SeitenQ.1 To Study Communication Guiding SystemVijendra SolankiNoch keine Bewertungen
- Lecture 01Dokument101 SeitenLecture 01王和盛Noch keine Bewertungen
- XASE18-Navigation SystemDokument105 SeitenXASE18-Navigation SystemVigha Omnica Iyer100% (1)
- 00 Introduction To Aviation TranscriptDokument9 Seiten00 Introduction To Aviation TranscriptAvtechNoch keine Bewertungen
- Answers Avionics Exam February 2006Dokument3 SeitenAnswers Avionics Exam February 2006sathishNoch keine Bewertungen
- Air NavigationDokument19 SeitenAir NavigationRaja Drive100% (3)
- Basic TermsDokument2 SeitenBasic TermsMuhammad Tanveer ul HaqNoch keine Bewertungen
- Basic Navigation PDFDokument17 SeitenBasic Navigation PDFtopgun320Noch keine Bewertungen
- Airborne Doppler Radar Navigation of Jet Transport Aircraft-EftDokument10 SeitenAirborne Doppler Radar Navigation of Jet Transport Aircraft-Eftjulio perezNoch keine Bewertungen
- Methods of NavigationDokument5 SeitenMethods of NavigationReyne Col-iteng ReylNoch keine Bewertungen
- Gps Lecture NotesDokument101 SeitenGps Lecture NotesRocking ChakravarthyNoch keine Bewertungen
- Flight Instruments: From Wikipedia, The Free EncyclopediaDokument10 SeitenFlight Instruments: From Wikipedia, The Free EncyclopediaNur InayahNoch keine Bewertungen
- Navigational AidDokument25 SeitenNavigational AidTehmina Toufiq KhanNoch keine Bewertungen
- Annex A - Gps FundamentalsDokument20 SeitenAnnex A - Gps FundamentalsyonimargetanehNoch keine Bewertungen
- AEI 3+kkDokument15 SeitenAEI 3+kkagung ardyNoch keine Bewertungen
- Sat NavDokument10 SeitenSat NavfcoespinosaNoch keine Bewertungen
- NavAids AduDokument89 SeitenNavAids AduEd Richard TorresNoch keine Bewertungen
- Guidance, Navigation and Control of Fixed-Wing Unmanned Aerial VehiclesDokument13 SeitenGuidance, Navigation and Control of Fixed-Wing Unmanned Aerial VehiclesBHAVESH JOSHINoch keine Bewertungen
- WaypointDokument2 SeitenWaypointFco Javier CruzNoch keine Bewertungen
- GMM 1 and C CHAPTER 9 Ballistics, Fire Control, and AlignmentDokument44 SeitenGMM 1 and C CHAPTER 9 Ballistics, Fire Control, and AlignmentDr. RAMPRASADH.CNoch keine Bewertungen
- Navigation 01Dokument8 SeitenNavigation 01Khian LiNoch keine Bewertungen
- 10.GPS Lect.10Dokument18 Seiten10.GPS Lect.10tofa abiNoch keine Bewertungen
- Part I Working of GPS/DGPS Part II Programming of GPSDokument28 SeitenPart I Working of GPS/DGPS Part II Programming of GPSSnehashish PatnaikNoch keine Bewertungen
- Input Requirements of Ils Mapper ProgramDokument5 SeitenInput Requirements of Ils Mapper ProgramLê Khánh DuyNoch keine Bewertungen
- Investigating The Effect of The Deflection of The Vertical On Lidar ObservationsDokument12 SeitenInvestigating The Effect of The Deflection of The Vertical On Lidar ObservationsarashNoch keine Bewertungen
- Applications of Coordinate GeometryDokument8 SeitenApplications of Coordinate GeometryAnshu RsNoch keine Bewertungen
- NS101 - 05 - Fundamentals of Navigation (FALL-15)Dokument24 SeitenNS101 - 05 - Fundamentals of Navigation (FALL-15)Tim ZeeNoch keine Bewertungen
- Flight Test Instrumentation: Proceedings of the Third International Symposium 1964Von EverandFlight Test Instrumentation: Proceedings of the Third International Symposium 1964M. A. PerryNoch keine Bewertungen
- Signal Processing of Airborne Radar Stations: Plane Flight Control in Difficult MeteoconditionsVon EverandSignal Processing of Airborne Radar Stations: Plane Flight Control in Difficult MeteoconditionsNoch keine Bewertungen
- Discrete Event SimulationDokument7 SeitenDiscrete Event SimulationM S PrasadNoch keine Bewertungen
- Optimization Types and Class CPDokument56 SeitenOptimization Types and Class CPM S PrasadNoch keine Bewertungen
- Conceptual ModelDokument11 SeitenConceptual ModelM S PrasadNoch keine Bewertungen
- Restricted Boltzman MachineDokument9 SeitenRestricted Boltzman MachineM S PrasadNoch keine Bewertungen
- Cross Validation LN 12Dokument11 SeitenCross Validation LN 12M S PrasadNoch keine Bewertungen
- Cross Validation LN 12 PDFDokument11 SeitenCross Validation LN 12 PDFM S PrasadNoch keine Bewertungen
- Reinforcement LN-6Dokument13 SeitenReinforcement LN-6M S PrasadNoch keine Bewertungen
- Convolution Neural Network: CP - 6 Machine Learning M S PrasadDokument28 SeitenConvolution Neural Network: CP - 6 Machine Learning M S PrasadM S PrasadNoch keine Bewertungen
- Principal Component Analysis CP 19Dokument15 SeitenPrincipal Component Analysis CP 19M S PrasadNoch keine Bewertungen
- Genetic Algorithm LNDokument27 SeitenGenetic Algorithm LNM S PrasadNoch keine Bewertungen
- Cross Validation LN 12Dokument11 SeitenCross Validation LN 12M S PrasadNoch keine Bewertungen
- Reinforcement LN-6Dokument13 SeitenReinforcement LN-6M S PrasadNoch keine Bewertungen
- Airspace Classification LNDokument47 SeitenAirspace Classification LNM S PrasadNoch keine Bewertungen
- Arinc Standards LN - 13Dokument14 SeitenArinc Standards LN - 13M S PrasadNoch keine Bewertungen
- Automatic Flight Control System ClassicaDokument145 SeitenAutomatic Flight Control System ClassicaM S PrasadNoch keine Bewertungen
- INS Coordinate Systems LN1Dokument13 SeitenINS Coordinate Systems LN1M S PrasadNoch keine Bewertungen
- DO 178 B Brief NotesDokument18 SeitenDO 178 B Brief NotesM S PrasadNoch keine Bewertungen
- LN Estimation TheoryDokument11 SeitenLN Estimation TheoryM S PrasadNoch keine Bewertungen
- LN Safety Critical SW TestingDokument14 SeitenLN Safety Critical SW TestingM S PrasadNoch keine Bewertungen
- Bic SwarmDokument71 SeitenBic SwarmM S PrasadNoch keine Bewertungen
- MC DC Testing LNDokument6 SeitenMC DC Testing LNM S PrasadNoch keine Bewertungen
- Fault Tolerant NAvigation LNDokument10 SeitenFault Tolerant NAvigation LNM S PrasadNoch keine Bewertungen
- Model Testing V & V LNDokument5 SeitenModel Testing V & V LNM S PrasadNoch keine Bewertungen
- Ads B LNDokument7 SeitenAds B LNM S PrasadNoch keine Bewertungen
- EXception Handling: Avionics SoftwareDokument10 SeitenEXception Handling: Avionics SoftwareM S PrasadNoch keine Bewertungen
- Arinc Standards LN - 13Dokument14 SeitenArinc Standards LN - 13M S PrasadNoch keine Bewertungen
- ARINc 629 PDFDokument9 SeitenARINc 629 PDFM S PrasadNoch keine Bewertungen
- LN 3 Fault Tolerant SW - ASE PDFDokument21 SeitenLN 3 Fault Tolerant SW - ASE PDFM S PrasadNoch keine Bewertungen
- Inertial Navigation System Pt2Dokument12 SeitenInertial Navigation System Pt2M S Prasad0% (1)
- Citation X PTM v1 MCDDokument353 SeitenCitation X PTM v1 MCDDan Striga100% (1)
- Aviation Questionnaire: Image Not Found or Type UnknownDokument3 SeitenAviation Questionnaire: Image Not Found or Type UnknownVadim TsaplinNoch keine Bewertungen
- AuglastquesDokument15 SeitenAuglastquesRoshan MenonNoch keine Bewertungen
- T-45 Natops Question Bank GougeDokument36 SeitenT-45 Natops Question Bank GougejfadslfjasnNoch keine Bewertungen
- Jeppview For Windows: List of Pages in This Trip KitDokument89 SeitenJeppview For Windows: List of Pages in This Trip KitСаша ДроздовNoch keine Bewertungen
- BMS TrainingDokument150 SeitenBMS TrainingMichael EvansNoch keine Bewertungen
- Jeppview For Windows: List of Pages in This Trip KitDokument61 SeitenJeppview For Windows: List of Pages in This Trip Kitorionclass0% (1)
- Nav 2000Dokument4 SeitenNav 2000Balaji TriplantNoch keine Bewertungen
- XFMC TutorialDokument23 SeitenXFMC TutorialMiguel Amaya QuinteroNoch keine Bewertungen
- Textos Part 2Dokument50 SeitenTextos Part 2Ana Carolina G. ColettoNoch keine Bewertungen
- VHF NAV/ILS Problems: TroubleshootingDokument4 SeitenVHF NAV/ILS Problems: TroubleshootingAde SudengNoch keine Bewertungen
- Cat III SyllabusDokument9 SeitenCat III SyllabusAmine ChabchoubNoch keine Bewertungen
- CS Ec 20210422Dokument531 SeitenCS Ec 20210422Richard FloydNoch keine Bewertungen
- Circular 336 RNAV IAC DEPICTION - enDokument36 SeitenCircular 336 RNAV IAC DEPICTION - enjacquelineNoch keine Bewertungen
- Ef Ad 2 Efhk 04R IlsDokument1 SeiteEf Ad 2 Efhk 04R IlsHarhaliiniNoch keine Bewertungen
- NOTAM Originators Manual V1.2Dokument38 SeitenNOTAM Originators Manual V1.2chhetribharat08Noch keine Bewertungen
- OPS 1.1.053 - Category 3 Operations - Rev 2Dokument33 SeitenOPS 1.1.053 - Category 3 Operations - Rev 2giant360Noch keine Bewertungen
- A320 Questionnaire1Dokument142 SeitenA320 Questionnaire1alegiustizieri77% (22)
- Elefe WebDokument7 SeitenElefe Webelefe311Noch keine Bewertungen
- CP Vordme Approach A320Dokument6 SeitenCP Vordme Approach A320Akmal AimanNoch keine Bewertungen
- RCMQ Ils36Dokument1 SeiteRCMQ Ils36tommyNoch keine Bewertungen
- Flight Mode Annunciator: Auto Thrust Mode Vertical Mode Lateral Mode Approach Capabilities Auto Flight StatusDokument10 SeitenFlight Mode Annunciator: Auto Thrust Mode Vertical Mode Lateral Mode Approach Capabilities Auto Flight StatusAndréslo MontoyaNoch keine Bewertungen
- Air Regulations 7 To 13 ChaptersDokument7 SeitenAir Regulations 7 To 13 ChaptersAnuj GahlawatNoch keine Bewertungen
- NTSB Releases Early Report On Litchfield Plane CrashDokument18 SeitenNTSB Releases Early Report On Litchfield Plane CrashWGME CBS13Noch keine Bewertungen
- 9643 SoirDokument38 Seiten9643 SoirpolscreamNoch keine Bewertungen
- Vrmmomdb PDF 1614791221Dokument67 SeitenVrmmomdb PDF 1614791221Мистермарк МистерклимюкNoch keine Bewertungen
- LTBFDokument12 SeitenLTBFİ. Çağlar YILDIRIMNoch keine Bewertungen
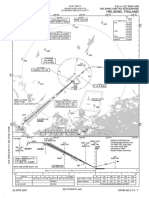
- KMIA ILS Runway 09 Approach ChartDokument1 SeiteKMIA ILS Runway 09 Approach ChartRichard SteelNoch keine Bewertungen
- MGL EFIS User ManualDokument151 SeitenMGL EFIS User ManualJason WepenerNoch keine Bewertungen