Das könnte Ihnen auch gefallen
- Piezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesVon EverandPiezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesNoch keine Bewertungen
- A Pipeline Inspection Robot With A Linkage Type Mechanical ClutchDokument6 SeitenA Pipeline Inspection Robot With A Linkage Type Mechanical ClutchNUBIA DIAZNoch keine Bewertungen
- Miniature Robots For A Desktop Flexible Micro Manufactring SystemDokument7 SeitenMiniature Robots For A Desktop Flexible Micro Manufactring SystemDrMohamed MansourNoch keine Bewertungen
- A New Climbing Robot For Suspension Insulator Strings: FANG Lijin, XU Xinlin, GUO XiaokunDokument5 SeitenA New Climbing Robot For Suspension Insulator Strings: FANG Lijin, XU Xinlin, GUO Xiaokunالبيوع البيوعNoch keine Bewertungen
- Pipe Inspection RobotDokument3 SeitenPipe Inspection Robotjaydev vermaNoch keine Bewertungen
- Investigation of Design & Fabrication of In-Pipe Inspection RobotDokument4 SeitenInvestigation of Design & Fabrication of In-Pipe Inspection RobotMilos BubanjaNoch keine Bewertungen
- A Mobile Jack Robot For Rescue Operation: J.Tanaka, K.Suzumori, M.Takata, T.Kanda, and M.MoriDokument6 SeitenA Mobile Jack Robot For Rescue Operation: J.Tanaka, K.Suzumori, M.Takata, T.Kanda, and M.MoriSamael RuizNoch keine Bewertungen
- p37 PDFDokument8 Seitenp37 PDFDiagsysLrpeNoch keine Bewertungen
- An Omni-Directional Wall-Climbing Microrobot With Magnetic Wheels Directly Integrated With Electromagnetic MicromotorsDokument9 SeitenAn Omni-Directional Wall-Climbing Microrobot With Magnetic Wheels Directly Integrated With Electromagnetic MicromotorsDreadful ParagonNoch keine Bewertungen
- Lin 2022 J. Phys. Conf. Ser. 2366 012046Dokument8 SeitenLin 2022 J. Phys. Conf. Ser. 2366 012046kitosijackline8Noch keine Bewertungen
- Application of Robotics For The Nuclear Power Plants in KoreaDokument5 SeitenApplication of Robotics For The Nuclear Power Plants in KoreaAbhilasha SaksenaNoch keine Bewertungen
- Mechanism Design For Walking Typed Solar Panel-Cleaning Robot Using Triple Driving LinesDokument19 SeitenMechanism Design For Walking Typed Solar Panel-Cleaning Robot Using Triple Driving LinesIAES International Journal of Robotics and AutomationNoch keine Bewertungen
- 9 Patent Licenta ..... (1-6)Dokument6 Seiten9 Patent Licenta ..... (1-6)Alex ViatoremNoch keine Bewertungen
- Aitken, Jones - Sams Teach Yourself C in 21 Days, 6th EditionDokument4 SeitenAitken, Jones - Sams Teach Yourself C in 21 Days, 6th EditionStephen J. RobertsNoch keine Bewertungen
- Nan 2021 J. Phys. Conf. Ser. 1948 012076Dokument6 SeitenNan 2021 J. Phys. Conf. Ser. 1948 012076Nikmah MhNoch keine Bewertungen
- Explorer: Untethered Real-Time Gas Main Assessment Robot SystemDokument6 SeitenExplorer: Untethered Real-Time Gas Main Assessment Robot SystemSweta DeyNoch keine Bewertungen
- 3.micro Cam SystemokDokument10 Seiten3.micro Cam SystemokNgô MạnhNoch keine Bewertungen
- 10CiiT 18Dokument4 Seiten10CiiT 18SerryAlbercaNoch keine Bewertungen
- Robots in Radioactive Environments Seminar 2004Dokument23 SeitenRobots in Radioactive Environments Seminar 2004Ejaz KNoch keine Bewertungen
- Jian Lei Ren, Ji Shun Li, Fang Yang and Jie ChenDokument5 SeitenJian Lei Ren, Ji Shun Li, Fang Yang and Jie Chenjeremytoh89Noch keine Bewertungen
- Metal Detecting RobotDokument51 SeitenMetal Detecting RobotBariq MohammadNoch keine Bewertungen
- Walker MechanismDokument4 SeitenWalker MechanismRAJANoch keine Bewertungen
- Magnetic Bearings Theory and ApplicationsDokument140 SeitenMagnetic Bearings Theory and ApplicationsYüksel Kurtalan100% (2)
- Skysweeper: A Low Dof, Dynamic High Wire Robot: Nicholas Morozovsky, Thomas BewleyDokument6 SeitenSkysweeper: A Low Dof, Dynamic High Wire Robot: Nicholas Morozovsky, Thomas BewleyJosue Joel Clemente MalpartidaNoch keine Bewertungen
- Project ReportDokument31 SeitenProject ReportmurariNoch keine Bewertungen
- A Compact and Compliant External Pipe-Crawling Robot: Puneet Singh and G. K. AnanthasureshDokument10 SeitenA Compact and Compliant External Pipe-Crawling Robot: Puneet Singh and G. K. AnanthasureshJinu JacobNoch keine Bewertungen
- WCRDokument6 SeitenWCRArpit S SavarkarNoch keine Bewertungen
- Pipe Inspection RobotDokument7 SeitenPipe Inspection RobotSharanabasappa SajjanNoch keine Bewertungen
- A Novel Discrete Wire-Driven Continuum Robot Arm With Passive Sliding Disc: Design, Kinematics and Passive Tension ControlDokument18 SeitenA Novel Discrete Wire-Driven Continuum Robot Arm With Passive Sliding Disc: Design, Kinematics and Passive Tension ControlnoxoNoch keine Bewertungen
- Design and Analysis of Articulated Inspection Arm of Robot: International Journal For Trends in Engineering & TechnologyDokument6 SeitenDesign and Analysis of Articulated Inspection Arm of Robot: International Journal For Trends in Engineering & TechnologyMoftah EddeifNoch keine Bewertungen
- Rotary-Linear Machines - A SurveyDokument4 SeitenRotary-Linear Machines - A Surveyarnika33Noch keine Bewertungen
- Project I Group 31 v5Dokument20 SeitenProject I Group 31 v5Kaushik KunaleNoch keine Bewertungen
- Electromagnetic EngineDokument4 SeitenElectromagnetic EngineJagan JJNoch keine Bewertungen
- Automatic Balancing Robot: Madhuram.M (Assistant Professor)Dokument12 SeitenAutomatic Balancing Robot: Madhuram.M (Assistant Professor)رشيد بن صغيرNoch keine Bewertungen
- Design and Implementation of Stair-Climbing Robot For Rescue ApplicationsDokument8 SeitenDesign and Implementation of Stair-Climbing Robot For Rescue ApplicationsLee Shi HongNoch keine Bewertungen
- VuQuyHung08 Autonomous20Stair20Climbing20Algorithm20for20a20Small20Four-Tracked20RobotDokument6 SeitenVuQuyHung08 Autonomous20Stair20Climbing20Algorithm20for20a20Small20Four-Tracked20RobotLohatiNoch keine Bewertungen
- 1 s2.0 S1110016818300899 Main PDFDokument10 Seiten1 s2.0 S1110016818300899 Main PDFSp. RaNoch keine Bewertungen
- An In-Pipe Robot With Multi-Axial Differential Gear MechanismDokument6 SeitenAn In-Pipe Robot With Multi-Axial Differential Gear MechanismNUBIA DIAZNoch keine Bewertungen
- Mechatronics in Rotating MachineryDokument16 SeitenMechatronics in Rotating MachineryPiotr PietrzakNoch keine Bewertungen
- Design, Analysis and Performance Investigation of Electro Magnetic EngineDokument2 SeitenDesign, Analysis and Performance Investigation of Electro Magnetic Engineu2005044Noch keine Bewertungen
- MEMSGyro CompDokument8 SeitenMEMSGyro CompRui CostaNoch keine Bewertungen
- Characterization of Electromagnetic Rotor Material Properties and Their Impact On An Ultra-High Speed Spinning Ball MotorDokument4 SeitenCharacterization of Electromagnetic Rotor Material Properties and Their Impact On An Ultra-High Speed Spinning Ball MotorSteve OoiNoch keine Bewertungen
- A Survey of Micro-Actuator Technologies For Future Spacecraft MissionsDokument11 SeitenA Survey of Micro-Actuator Technologies For Future Spacecraft Missionsalexandruanton8_4325Noch keine Bewertungen
- UIUC 451 Interim PaperDokument13 SeitenUIUC 451 Interim Paperanon_996725493Noch keine Bewertungen
- Fabrication of Special Purpose Machine: R Kumar, Hemanth Kumar J, Chethan KumarDokument4 SeitenFabrication of Special Purpose Machine: R Kumar, Hemanth Kumar J, Chethan KumarMikyas BelayNoch keine Bewertungen
- Chapter 2Dokument19 SeitenChapter 2Aung ThikeNoch keine Bewertungen
- Piezoelectric Ultrasonic Motors OverviewDokument14 SeitenPiezoelectric Ultrasonic Motors Overviewsai krishna pothuNoch keine Bewertungen
- Linear Generator ApplicationsDokument4 SeitenLinear Generator ApplicationsVishal Garg100% (1)
- Simple Design of Control Motor AC For Rotary ForceDokument8 SeitenSimple Design of Control Motor AC For Rotary Force1BElvara Dinda FebrielaNoch keine Bewertungen
- Wall CleanerDokument5 SeitenWall CleanerNaitik JainNoch keine Bewertungen
- Recent Advances in The Control of Piezoelectric Actuators: International Journal of Advanced Robotic SystemsDokument11 SeitenRecent Advances in The Control of Piezoelectric Actuators: International Journal of Advanced Robotic SystemsAlioune Badara DioufNoch keine Bewertungen
- TEMTexto 1Dokument16 SeitenTEMTexto 1adNoch keine Bewertungen
- Literature ReviewDokument18 SeitenLiterature Reviewroyal1979Noch keine Bewertungen
- Balancing Control of A Two Wheeled Mobile Robot SystemDokument7 SeitenBalancing Control of A Two Wheeled Mobile Robot SystemAbdellilah HattabNoch keine Bewertungen
- 48 Teleoperation of A Mobile Robot Using ADokument11 Seiten48 Teleoperation of A Mobile Robot Using AEmilia FeliciaNoch keine Bewertungen
- Position Control of 3-DOF Articulated Robot Arm Using PID ControllerDokument7 SeitenPosition Control of 3-DOF Articulated Robot Arm Using PID ControllerJoker JkNoch keine Bewertungen
- Design and Analysis of A Maglev Planar Transportation VehicleDokument7 SeitenDesign and Analysis of A Maglev Planar Transportation VehiclealongdieylaNoch keine Bewertungen
- Review de Tecnologias de Robots en InspeccionDokument6 SeitenReview de Tecnologias de Robots en InspeccionEsteban RodriguezNoch keine Bewertungen
- Solar Panel Cleaning RobotDokument14 SeitenSolar Panel Cleaning RobotLê Thu NguyetNoch keine Bewertungen
- Sb3150 Schottky Rectifier: Sangdest Microelectronics Green ProductsDokument5 SeitenSb3150 Schottky Rectifier: Sangdest Microelectronics Green ProductsMisael GonzalezNoch keine Bewertungen
- Unisonic Technologies Co., LTD: Low Dropout Voltage RegulatorDokument13 SeitenUnisonic Technologies Co., LTD: Low Dropout Voltage RegulatorMisael GonzalezNoch keine Bewertungen
- C 3198Dokument1 SeiteC 3198Kunal Kundanam100% (1)
- C 3198Dokument1 SeiteC 3198Kunal Kundanam100% (1)
- Unisonic Technologies Co., LTD: Low Dropout Voltage RegulatorDokument13 SeitenUnisonic Technologies Co., LTD: Low Dropout Voltage RegulatorMisael GonzalezNoch keine Bewertungen
- Sony HCD Gtr333 Gtr555 Gtr777 Gtr888 DiagramaDokument130 SeitenSony HCD Gtr333 Gtr555 Gtr777 Gtr888 DiagramaCiclismo Sexta Región88% (8)
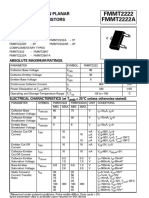
- fmmt2222, Fmmt2222a, Fmmt2222ar, fmmt2222r Zetex PDFDokument3 Seitenfmmt2222, Fmmt2222a, Fmmt2222ar, fmmt2222r Zetex PDFagusNoch keine Bewertungen
- Low Noise Operational Amplifiers: DatasheetDokument43 SeitenLow Noise Operational Amplifiers: DatasheetMisael GonzalezNoch keine Bewertungen
- ZXM62P02E6: 20V P-Channel Enhancement Mode MosfetDokument8 SeitenZXM62P02E6: 20V P-Channel Enhancement Mode MosfetMisael GonzalezNoch keine Bewertungen
- C 3198Dokument1 SeiteC 3198Kunal Kundanam100% (1)
- SMD CatalogDokument80 SeitenSMD CatalogMarudhasalamMarudhaNoch keine Bewertungen
- 1.0 Features 2.0 Description: Digital PWM Current-Mode Controller For Quasi-Resonant OperationDokument20 Seiten1.0 Features 2.0 Description: Digital PWM Current-Mode Controller For Quasi-Resonant OperationMisael GonzalezNoch keine Bewertungen
- Samsung Bn44-00622b Power Supply SCHDokument6 SeitenSamsung Bn44-00622b Power Supply SCHandre100% (1)
- Continental Device India Limited: NPN Silicon Planar Epitaxial TransistorsDokument3 SeitenContinental Device India Limited: NPN Silicon Planar Epitaxial TransistorsMisael GonzalezNoch keine Bewertungen
- 2SA1106Dokument2 Seiten2SA1106Belmont BelmontNoch keine Bewertungen
- ALto MAxidrive3.4Dokument41 SeitenALto MAxidrive3.4Misael GonzalezNoch keine Bewertungen
- RSAG7.820.2194 - LCD LED Diagrama de FuenteDokument1 SeiteRSAG7.820.2194 - LCD LED Diagrama de FuenteAntonio DalioNoch keine Bewertungen
- Fuente Tkl2297S RSAG7.820.1569 VER.EDokument1 SeiteFuente Tkl2297S RSAG7.820.1569 VER.EMisael GonzalezNoch keine Bewertungen
- RSAG7.820.2194 - LCD LED Diagrama de FuenteDokument1 SeiteRSAG7.820.2194 - LCD LED Diagrama de FuenteAntonio DalioNoch keine Bewertungen
- ThereminoSystem SmdCodes PDFDokument95 SeitenThereminoSystem SmdCodes PDFAgin TersakitiNoch keine Bewertungen
- Fender&Sunn 1200S PwrampDokument1 SeiteFender&Sunn 1200S PwrampMisael GonzalezNoch keine Bewertungen
- MXEreadmeDokument11 SeitenMXEreadmeMisael GonzalezNoch keine Bewertungen
- BCW71 BCW72 BCW71 BCW72: Sot23 NPN Planar Small Signal TransistorsDokument3 SeitenBCW71 BCW72 BCW71 BCW72: Sot23 NPN Planar Small Signal TransistorsMisael GonzalezNoch keine Bewertungen
- JBL jrx118sp PDFDokument11 SeitenJBL jrx118sp PDFVictor Chang100% (1)
- Peavey Semiconductor Cross Reference ListDokument24 SeitenPeavey Semiconductor Cross Reference Listren_theoriginalpunks100% (10)
- Service Manual: MODEL: MACRO830/1400/2400Dokument38 SeitenService Manual: MODEL: MACRO830/1400/2400Osmar ContreirasNoch keine Bewertungen
- Behringer Sps600 Power-Supply SCHDokument2 SeitenBehringer Sps600 Power-Supply SCHMisael Gonzalez80% (5)
- Roland Db700Dokument15 SeitenRoland Db700Misael GonzalezNoch keine Bewertungen
- Allegro Power TransistorsDokument179 SeitenAllegro Power Transistorsangelic2_arenas2391100% (1)
- Jeknavorian Emviar Alis AditivosDokument3 SeitenJeknavorian Emviar Alis AditivosHuaman Chavez Jesus AngelNoch keine Bewertungen
- 4R70W Rebuild ChecklistDokument26 Seiten4R70W Rebuild ChecklistSamuel Zuniga88% (8)
- UTB 445 S UTB 530 Service-Repair ManualDokument210 SeitenUTB 445 S UTB 530 Service-Repair ManualMplachouras-Plachouras Nikolaos89% (143)
- Single Row Radial Ball Bearings - Inch: AfbmaDokument2 SeitenSingle Row Radial Ball Bearings - Inch: AfbmaIgorNoch keine Bewertungen
- MOBILE CRANE Grove RT58D CLPDokument9 SeitenMOBILE CRANE Grove RT58D CLPahmed sleemNoch keine Bewertungen
- Blanket Wash Up DeviceDokument12 SeitenBlanket Wash Up DeviceSonia NaickerNoch keine Bewertungen
- 15466566-HDSMSMR11XXX-Harley Davidson Sportster Models Service Manual Repair 1979-1985 XLCH XLHDokument343 Seiten15466566-HDSMSMR11XXX-Harley Davidson Sportster Models Service Manual Repair 1979-1985 XLCH XLHfranta92% (12)
- X760 - 303-01A - Engine - INGENIUM I4 2.0L DieselDokument44 SeitenX760 - 303-01A - Engine - INGENIUM I4 2.0L DieselDejan Stojanovski75% (4)
- hp52 2001Dokument13 Seitenhp52 2001GoodBikesNoch keine Bewertungen
- 2b3 SmartUP Parts Manual, 24472102 Rev.B Mar.2013Dokument42 Seiten2b3 SmartUP Parts Manual, 24472102 Rev.B Mar.2013Izabela SantanaNoch keine Bewertungen
- CY62-40HP-4P-TCE-324T Datos MotorDokument8 SeitenCY62-40HP-4P-TCE-324T Datos MotorraulNoch keine Bewertungen
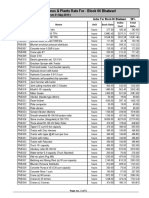
- Block 06 Bhatwari - ResourceRate - MachineDokument3 SeitenBlock 06 Bhatwari - ResourceRate - MachineManojNoch keine Bewertungen
- 70ZV 2 (EU Trouble)Dokument115 Seiten70ZV 2 (EU Trouble)Halil KaraNoch keine Bewertungen
- Cool Tower B&ABM Prod CatlogueDokument16 SeitenCool Tower B&ABM Prod CatlogueR BhattacharyaNoch keine Bewertungen
- 4-Pole Motor SSD PDFDokument4 Seiten4-Pole Motor SSD PDFAnonymous 9ejnUQNoch keine Bewertungen
- Rd10 Partes Drill EVERDIGMDokument240 SeitenRd10 Partes Drill EVERDIGMLuisAntonioVegaParangueoNoch keine Bewertungen
- Reliance Probe Iom R500 E189 A 3 2012 08Dokument2 SeitenReliance Probe Iom R500 E189 A 3 2012 08abdul rehmanNoch keine Bewertungen
- Unimec Screw JackDokument74 SeitenUnimec Screw JackRohit Kumar SinghNoch keine Bewertungen
- Gas Power Cycle Motor Bakar Soal Motor Jawaban DisiniDokument72 SeitenGas Power Cycle Motor Bakar Soal Motor Jawaban DisiniirkaidirfaisNoch keine Bewertungen
- MTD Yardman Lawn Tractor ManualDokument71 SeitenMTD Yardman Lawn Tractor ManualWilliam Kibbe100% (4)
- Heavy Two WheelerDokument22 SeitenHeavy Two WheelersenthilnaveenNoch keine Bewertungen
- A7dca BSDZVCFDokument2 SeitenA7dca BSDZVCFRAJANoch keine Bewertungen
- Parts List: Tumx-CDokument49 SeitenParts List: Tumx-CNilton RovedaNoch keine Bewertungen
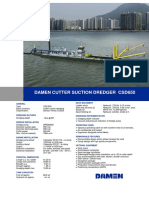
- Damen Cutter Suction Dredger 650 PDFDokument2 SeitenDamen Cutter Suction Dredger 650 PDFIT AccountNoch keine Bewertungen
- A404 (30TH) /A413 A470/A670 (31TH) Chrysler FWDDokument6 SeitenA404 (30TH) /A413 A470/A670 (31TH) Chrysler FWDsamuelNoch keine Bewertungen
- GetDokument2 SeitenGetluigacanNoch keine Bewertungen
- Karcher Pressure Washer Parts and Basic Repair Service Manual Pump 785 HD2500G HD2500MTD HD2600DK HD2700DH HD2701DRDokument17 SeitenKarcher Pressure Washer Parts and Basic Repair Service Manual Pump 785 HD2500G HD2500MTD HD2600DK HD2700DH HD2701DRt_zonne855750% (2)
- 276-2600 VEXEDR ClawbotKit PartsList Rev3Dokument4 Seiten276-2600 VEXEDR ClawbotKit PartsList Rev3Asad CheemaNoch keine Bewertungen
- Machine DrawingDokument232 SeitenMachine DrawingRajakumar Sundaram100% (4)
- Lombardini 3LD510 Std.Dokument31 SeitenLombardini 3LD510 Std.Cornel CristianNoch keine Bewertungen