Das könnte Ihnen auch gefallen
- Matlab ScadaDokument9 SeitenMatlab ScadaNidul SinhaNoch keine Bewertungen
- Unit 4 PMU and WMU NotesDokument18 SeitenUnit 4 PMU and WMU NotesAayush PatidarNoch keine Bewertungen
- Report On PmuDokument15 SeitenReport On PmuMohan Sainath AvvaruNoch keine Bewertungen
- A New Computer Based Phasor Measurement Unit FrameworkDokument6 SeitenA New Computer Based Phasor Measurement Unit FrameworkABMOHENoch keine Bewertungen
- Wide Area Monitoring, Protection and Control in Future Smart GridDokument38 SeitenWide Area Monitoring, Protection and Control in Future Smart GridRifqy RadhityaNoch keine Bewertungen
- Pmu IntroDokument30 SeitenPmu IntroSreepadam PadamNoch keine Bewertungen
- Challenges and Lessons Learned From Commissioning An IEC 61850-90-5 Based Synchrophasor SystemDokument8 SeitenChallenges and Lessons Learned From Commissioning An IEC 61850-90-5 Based Synchrophasor SystemGelareh ShefaeiNoch keine Bewertungen
- UNIT2Dokument19 SeitenUNIT2Ammu PuniNoch keine Bewertungen
- Mansour GPS in Power SystemsDokument61 SeitenMansour GPS in Power SystemsSatya Narayan SinghNoch keine Bewertungen
- GPS in Power SystemsDokument61 SeitenGPS in Power SystemsSiva KumarNoch keine Bewertungen
- Mansour GPS in Power SystemsDokument61 SeitenMansour GPS in Power SystemsRaviKiran AvulaNoch keine Bewertungen
- Applications of Gps in Power EngineeringDokument61 SeitenApplications of Gps in Power EngineeringIonut MoisiiNoch keine Bewertungen
- FOLD presentation-WAMSDokument41 SeitenFOLD presentation-WAMShemanth727Noch keine Bewertungen
- Application of Synchrophasor Technology To CREZ SystemDokument27 SeitenApplication of Synchrophasor Technology To CREZ SystemMohan ThakreNoch keine Bewertungen
- Phasor Measurement Units: Hesen Liu, Minh Nguyen, Ryan Russel, Mathew Stinnett, Micah Till, and Nicholas ZamudioDokument47 SeitenPhasor Measurement Units: Hesen Liu, Minh Nguyen, Ryan Russel, Mathew Stinnett, Micah Till, and Nicholas ZamudioImran SharieffNoch keine Bewertungen
- A New Adaptive PMU Based Protection Scheme For Interconnected Transmission Network SystemDokument7 SeitenA New Adaptive PMU Based Protection Scheme For Interconnected Transmission Network SystemABMOHENoch keine Bewertungen
- C - 4: P U (PMU) : Lass Hasor Measurement NITDokument37 SeitenC - 4: P U (PMU) : Lass Hasor Measurement NITSreepadam PadamNoch keine Bewertungen
- Smart Grid ModDokument32 SeitenSmart Grid ModSandipNoch keine Bewertungen
- Wide Area Measurement SystemDokument7 SeitenWide Area Measurement SystemVIGNESH DHANASHEKHARNoch keine Bewertungen
- Phasor Measurment Unit For Transient Stability AnalysisDokument11 SeitenPhasor Measurment Unit For Transient Stability Analysisfekadu gebeyNoch keine Bewertungen
- Pmu 3Dokument32 SeitenPmu 3TopaNoch keine Bewertungen
- Early Fault DetectionDokument6 SeitenEarly Fault DetectionRajesh GangwarNoch keine Bewertungen
- Priorización de Señal de PMU para Una Coordinación de Control Efectiva de Los Centros de Envío de CargaDokument5 SeitenPriorización de Señal de PMU para Una Coordinación de Control Efectiva de Los Centros de Envío de CargaCRISTIAN ARTEAGANoch keine Bewertungen
- GE-Challenges and Lessons Learned From The Design and Implementation of An IEC 61850-90-5 Based Synchrophasor System-Georgia Tech Conference (GOOD)Dokument10 SeitenGE-Challenges and Lessons Learned From The Design and Implementation of An IEC 61850-90-5 Based Synchrophasor System-Georgia Tech Conference (GOOD)Gustavo AguayoNoch keine Bewertungen
- WAMSDokument19 SeitenWAMSRahul VarmanNoch keine Bewertungen
- Wide Area MonitoringDokument22 SeitenWide Area MonitoringSe SamnangNoch keine Bewertungen
- Implementation of Wide Area Monitoring System For Interconnected Power System in IndiaDokument6 SeitenImplementation of Wide Area Monitoring System For Interconnected Power System in IndiaRamesh KannanNoch keine Bewertungen
- Continuous Enviromental Monitoring System and Data ManagementDokument33 SeitenContinuous Enviromental Monitoring System and Data ManagementBùiMinhHảiNoch keine Bewertungen
- The Implementation of Phasor Measurement TechnologyDokument6 SeitenThe Implementation of Phasor Measurement TechnologyTravis WoodNoch keine Bewertungen
- Design and Implementation For Wide Area Power System Monitoring and Protection Using Phasor Measuring UnitsDokument8 SeitenDesign and Implementation For Wide Area Power System Monitoring and Protection Using Phasor Measuring UnitsozlemixxNoch keine Bewertungen
- A State-Of-The-Art PMU Based MonitoringDokument4 SeitenA State-Of-The-Art PMU Based MonitoringDavid MendozaNoch keine Bewertungen
- RE 709 Smart GridDokument42 SeitenRE 709 Smart GridRamaDinakaranNoch keine Bewertungen
- Phasor Mesurement System in BrazilDokument8 SeitenPhasor Mesurement System in Brazilrodrigo_saaNoch keine Bewertungen
- AMI - Unit3Dokument21 SeitenAMI - Unit3rajaramprathibaNoch keine Bewertungen
- Phasor Measurement Unit PDFDokument5 SeitenPhasor Measurement Unit PDFTkarpaga SenthilpandyNoch keine Bewertungen
- Implementation and Evaluation of A Labscale Synchrophasor Model and ApplicationsDokument6 SeitenImplementation and Evaluation of A Labscale Synchrophasor Model and ApplicationsHectorNoch keine Bewertungen
- Essential Steps in Prognostic Health ManagementDokument9 SeitenEssential Steps in Prognostic Health Managementowais khanNoch keine Bewertungen
- Lesson 3 2 Smart Grid Measurements PMUDokument14 SeitenLesson 3 2 Smart Grid Measurements PMUPowerGlobe Course MaterialNoch keine Bewertungen
- Design and Development of A Synchrophasor Measurement Unit As Per IEEE Standard C37.118.1 2011 Saeed Hassan Khan 20151112 1Dokument15 SeitenDesign and Development of A Synchrophasor Measurement Unit As Per IEEE Standard C37.118.1 2011 Saeed Hassan Khan 20151112 1Har HarNoch keine Bewertungen
- Otc 25457 MS PDFDokument9 SeitenOtc 25457 MS PDFHichem FakhfekhNoch keine Bewertungen
- Smart Motors - Point Machine MonitoringDokument10 SeitenSmart Motors - Point Machine MonitoringMartha MiralpeixNoch keine Bewertungen
- Micom P847: Phasor Measurement and System Stability UnitDokument4 SeitenMicom P847: Phasor Measurement and System Stability Unitkessir taouilNoch keine Bewertungen
- Phase Measurement Unit (PMU) :: Smart Grid TASK-1 Jawale Akshay Tanaji (44029)Dokument10 SeitenPhase Measurement Unit (PMU) :: Smart Grid TASK-1 Jawale Akshay Tanaji (44029)akshay jawaleNoch keine Bewertungen
- Wide Area Fault Detection Rule BaedDokument10 SeitenWide Area Fault Detection Rule Baedmachine learningNoch keine Bewertungen
- Applications of Synchrophasors Technology in Smart GridDokument13 SeitenApplications of Synchrophasors Technology in Smart Gridmohd zuhaibNoch keine Bewertungen
- Monitoring Power System Through Wide-Area MeasurementsDokument33 SeitenMonitoring Power System Through Wide-Area MeasurementsbijoyNoch keine Bewertungen
- WamsDokument6 SeitenWamsdawood ali MirzaNoch keine Bewertungen
- Naspi FPL 10 2011Dokument17 SeitenNaspi FPL 10 2011ASHISH KUMARNoch keine Bewertungen
- Wide-Area Protection and Control System With WAMS Based: November 2006Dokument6 SeitenWide-Area Protection and Control System With WAMS Based: November 2006Stalin Armijos ZambranoNoch keine Bewertungen
- Egat Pmu Smart Grid v1Dokument22 SeitenEgat Pmu Smart Grid v1Sudhir Ravipudi100% (1)
- Pmu Vs ScadaDokument7 SeitenPmu Vs ScadaRAJESH KUMARNoch keine Bewertungen
- Real-Time Synchrophasor Data Anomaly Detection and Classification Using Isolation Forest, Kmeans, and LoopDokument13 SeitenReal-Time Synchrophasor Data Anomaly Detection and Classification Using Isolation Forest, Kmeans, and LoopAmputee FunNoch keine Bewertungen
- Smart Grid Measurements: Saikat ChakrabartiDokument20 SeitenSmart Grid Measurements: Saikat ChakrabartirajaramprathibaNoch keine Bewertungen
- PMU MatlabDokument14 SeitenPMU MatlabNelson Francisco Marcano AguileraNoch keine Bewertungen
- Synchronized Phasor Measurements in Power Systems - A ReviewDokument7 SeitenSynchronized Phasor Measurements in Power Systems - A ReviewmgavrilasNoch keine Bewertungen
- 8 Application of Phasor Measurement UnitDokument9 Seiten8 Application of Phasor Measurement UnitISGENoch keine Bewertungen
- Pmu 07-10Dokument29 SeitenPmu 07-10Manas MahantaNoch keine Bewertungen
- Testing Synchrophasor DataDokument8 SeitenTesting Synchrophasor DatamersiumNoch keine Bewertungen
- Practical Data Acquisition for Instrumentation and Control SystemsVon EverandPractical Data Acquisition for Instrumentation and Control SystemsNoch keine Bewertungen
- Ace3 0620.06 GB PDFDokument12 SeitenAce3 0620.06 GB PDFduhgrandoNoch keine Bewertungen
- Plant Floor Safety Fall 2020 PDFDokument54 SeitenPlant Floor Safety Fall 2020 PDFPravivVivpraNoch keine Bewertungen
- Detailed Comparative Case Study On Environmentally Sustainable BuildingDokument8 SeitenDetailed Comparative Case Study On Environmentally Sustainable BuildingEditor IJTSRDNoch keine Bewertungen
- Rail Overview Brochure CumminsDokument16 SeitenRail Overview Brochure CumminsYuraNoch keine Bewertungen
- Training Manual Operations: July 1999-Rev.0Dokument110 SeitenTraining Manual Operations: July 1999-Rev.0FharishPutraNoch keine Bewertungen
- Boe (Boiler Operation Engineer) Short Type Question Answer For Examination - AskpowerplantDokument15 SeitenBoe (Boiler Operation Engineer) Short Type Question Answer For Examination - AskpowerplantRaju MaityNoch keine Bewertungen
- Company ProfileDokument189 SeitenCompany ProfileplanningNoch keine Bewertungen
- Primer On Wood Biomass For Energy PDFDokument10 SeitenPrimer On Wood Biomass For Energy PDFSTEFANIANoch keine Bewertungen
- Ethylene Plant Contaminants: A Database and Interactive ToolDokument23 SeitenEthylene Plant Contaminants: A Database and Interactive ToolEmmanuel LecrenayNoch keine Bewertungen
- Lecture01 - Introductory ConceptsDokument30 SeitenLecture01 - Introductory ConceptsCarl PNoch keine Bewertungen
- Prosper & Sucker RodDokument20 SeitenProsper & Sucker RodOmar AbdoNoch keine Bewertungen
- Yang-Mills Theory On The Light ConeDokument14 SeitenYang-Mills Theory On The Light Cones4suchiNoch keine Bewertungen
- Fluid Mechanics PapermakingDokument25 SeitenFluid Mechanics PapermakingM. Sultan MirajNoch keine Bewertungen
- Pipe - Line Bevel MachineDokument24 SeitenPipe - Line Bevel MachineSun SunNoch keine Bewertungen
- Historical Overview of Electrical Submersible Pump: The United States in 1923Dokument10 SeitenHistorical Overview of Electrical Submersible Pump: The United States in 1923AtaullahNoch keine Bewertungen
- Siemons - Cello Bowing TechniqueDokument15 SeitenSiemons - Cello Bowing TechniqueMassa Awaj100% (2)
- RMG 4015 Crack Depth MeasurementDokument4 SeitenRMG 4015 Crack Depth MeasurementJozmel Blancas CamarenaNoch keine Bewertungen
- Transmission Lines and NetworksDokument18 SeitenTransmission Lines and NetworkszgxfsbjbnNoch keine Bewertungen
- Why Buildings Fall Down How Structures FailDokument60 SeitenWhy Buildings Fall Down How Structures FaillyeshiunNoch keine Bewertungen
- GC - How It Works - Agilent - SusanPérezDokument19 SeitenGC - How It Works - Agilent - SusanPérezsusanbperezNoch keine Bewertungen
- Pump BasicsDokument118 SeitenPump BasicsVinod GuptaNoch keine Bewertungen
- Your Guide To Hydraulic FracturingDokument1 SeiteYour Guide To Hydraulic FracturingMartin GriffinNoch keine Bewertungen
- Preturi Panouri FotovoltaiceDokument106 SeitenPreturi Panouri FotovoltaiceramonadoniciNoch keine Bewertungen
- Ci Ride Leader - Guide To Cycling On The Road PDFDokument10 SeitenCi Ride Leader - Guide To Cycling On The Road PDFΑυτός είμαι εγώNoch keine Bewertungen
- Booster Basics PresentationDokument49 SeitenBooster Basics PresentationbinhjukiNoch keine Bewertungen
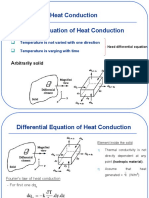
- Heat Conduction Differential Equation of Heat Conduction: Rbitrarily SolidDokument31 SeitenHeat Conduction Differential Equation of Heat Conduction: Rbitrarily SolidJoshua StrykrNoch keine Bewertungen
- What Is The Principle Behind XRDDokument4 SeitenWhat Is The Principle Behind XRDCesar CRNoch keine Bewertungen
- ISO-50001-JK-WhiteDokument24 SeitenISO-50001-JK-WhiteAgustinusDwiSusantoNoch keine Bewertungen
- 59529-Especificaciones para Preservacion EquiposDokument65 Seiten59529-Especificaciones para Preservacion EquiposrodolfostiNoch keine Bewertungen
- Solution of The Graetz-Brinkman Problem With The Laplace Transform Galerkin MethodDokument9 SeitenSolution of The Graetz-Brinkman Problem With The Laplace Transform Galerkin MethodDeny Arief RusamsiNoch keine Bewertungen