Das könnte Ihnen auch gefallen
- Reading Electric Bass - Berklee PressDokument112 SeitenReading Electric Bass - Berklee PressJulian Roa100% (2)
- LCL Filter DesignDokument8 SeitenLCL Filter DesignAlex RochaNoch keine Bewertungen
- Retention of Special Education TeachersDokument15 SeitenRetention of Special Education TeachersAmanda JohnsonNoch keine Bewertungen
- Brall 2007Dokument6 SeitenBrall 2007ronaldNoch keine Bewertungen
- Principles of Electric Machines and Power Electronics Second Edition PDFDokument184 SeitenPrinciples of Electric Machines and Power Electronics Second Edition PDFDimas AriaNoch keine Bewertungen
- Tip Speed RatioDokument4 SeitenTip Speed Ratiomaantom3Noch keine Bewertungen
- Lamb2 PDFDokument186 SeitenLamb2 PDFLibyaFlowerNoch keine Bewertungen
- Pscad 07Dokument110 SeitenPscad 07Dayah HassanNoch keine Bewertungen
- Asynchronous Motor Modelingin SimulinkforstatorandrotorfaultanalysisDokument5 SeitenAsynchronous Motor Modelingin SimulinkforstatorandrotorfaultanalysisMuh. ILHAM. Hasby. HNoch keine Bewertungen
- Gyung-Jin Park PHD (Auth.) - Analytic Methods For Design Practice-Springer-Verlag London (2007)Dokument635 SeitenGyung-Jin Park PHD (Auth.) - Analytic Methods For Design Practice-Springer-Verlag London (2007)Abed samadsureyft7vewyrNoch keine Bewertungen
- Reliability Engg Lect 3Dokument68 SeitenReliability Engg Lect 3Amrit Paudel100% (1)
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionVon EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNoch keine Bewertungen
- Ee 331 Design - Servo MotorDokument5 SeitenEe 331 Design - Servo MotorLa-Pierre O'MeallyNoch keine Bewertungen
- Optimal Power Flow Management For Grid PDFDokument12 SeitenOptimal Power Flow Management For Grid PDFTrần Đình ChiếnNoch keine Bewertungen
- MRAC - Pendulum SimulationDokument6 SeitenMRAC - Pendulum SimulationTecKnus BarbosaNoch keine Bewertungen
- Model Predictive Control of A DC-DC Buck ConverterDokument7 SeitenModel Predictive Control of A DC-DC Buck ConverterMeral MeralNoch keine Bewertungen
- A Fundamental Study Inter-Area Oscillations Power SystemsDokument8 SeitenA Fundamental Study Inter-Area Oscillations Power SystemsLuis MuñozNoch keine Bewertungen
- DEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1Dokument12 SeitenDEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1shoptodipNoch keine Bewertungen
- Electric Machinery - A. E. Fitzgerald, C. Kingsley and S. D. UmansDokument36 SeitenElectric Machinery - A. E. Fitzgerald, C. Kingsley and S. D. Umansgörkem100% (1)
- Pulse Code Modulation: EE 442 - Spring SemesterDokument45 SeitenPulse Code Modulation: EE 442 - Spring SemesterRiego TerteNoch keine Bewertungen
- Hydraulic Circuit Diagram (1/2) : PC400/450 (LC) - 7Dokument7 SeitenHydraulic Circuit Diagram (1/2) : PC400/450 (LC) - 7budi_ummNoch keine Bewertungen
- 2019 EEI Line Impedance With PLS-CADD PDFDokument34 Seiten2019 EEI Line Impedance With PLS-CADD PDFFrancisco SilvaNoch keine Bewertungen
- Electrical Transient PDFDokument6 SeitenElectrical Transient PDFalexwoodwickNoch keine Bewertungen
- CH 06Dokument55 SeitenCH 06Swapnil BondeNoch keine Bewertungen
- Project Case OR1 Sem2 - 2021Dokument21 SeitenProject Case OR1 Sem2 - 2021Ha NguyenNoch keine Bewertungen
- RSCAD Software OverviewDokument2 SeitenRSCAD Software Overviewkra_amNoch keine Bewertungen
- ME450 Winter2009 Final Report - Project 24 - Bicycle Hydraulic Regenerative Braking System PDFDokument107 SeitenME450 Winter2009 Final Report - Project 24 - Bicycle Hydraulic Regenerative Braking System PDFKeerthi Tom RajanNoch keine Bewertungen
- HwsDokument34 SeitenHwsYozef PazmiñoNoch keine Bewertungen
- Group 2Dokument2 SeitenGroup 2Zulqarnain KhanNoch keine Bewertungen
- Practice Problems - Synch - MachinesDokument3 SeitenPractice Problems - Synch - MachinesBea DucaoNoch keine Bewertungen
- 1.introduction To Electrical DrivesDokument22 Seiten1.introduction To Electrical DrivesSimbarashe ChitsungeNoch keine Bewertungen
- Comparison of Gas-Turbine and Combined Cycle Models For System Stability StudiesDokument7 SeitenComparison of Gas-Turbine and Combined Cycle Models For System Stability StudiesjmantNoch keine Bewertungen
- EAM NumericalDokument6 SeitenEAM Numerical61EEPrabhat PalNoch keine Bewertungen
- Digital Design and Computer Architecture, 2: EditionDokument134 SeitenDigital Design and Computer Architecture, 2: EditionСергей Капуста100% (1)
- Multi LVL DC DC BoostDokument9 SeitenMulti LVL DC DC BoostDurga PrathibhaNoch keine Bewertungen
- Resonant Circuits and Soft Switching (LLC Resonant Converter and Resonant Inverter)Dokument32 SeitenResonant Circuits and Soft Switching (LLC Resonant Converter and Resonant Inverter)Vishal Anand Ph.D .StudentNoch keine Bewertungen
- Bipolar Junction Transistors (BJTS)Dokument28 SeitenBipolar Junction Transistors (BJTS)Musa MagaulaNoch keine Bewertungen
- ReadmeDokument7 SeitenReadmeMoon3pellNoch keine Bewertungen
- Fault Detection On Radial Power Distribution Systems Using Fuzzy LogicDokument8 SeitenFault Detection On Radial Power Distribution Systems Using Fuzzy LogicDa DebebeNoch keine Bewertungen
- Activity Based Costing Worked Example: Products TotalDokument8 SeitenActivity Based Costing Worked Example: Products TotalAnn GelNoch keine Bewertungen
- 442 Revised Lab Manual w07Dokument51 Seiten442 Revised Lab Manual w07srinu247Noch keine Bewertungen
- Basic Electrical EngineeringDokument5 SeitenBasic Electrical EngineeringchaitanyaNoch keine Bewertungen
- ISYE 3450 Homework 1Dokument2 SeitenISYE 3450 Homework 1Brandon HarrisNoch keine Bewertungen
- Capital ViaDokument2 SeitenCapital ViaGraphic Era Deemed UniversityNoch keine Bewertungen
- Simu OptimDokument5 SeitenSimu OptimKalaichelvi KarthikeyanNoch keine Bewertungen
- 1986 A New Synchronous Current Regulator and An Analysis of Current-Regulated PWM Inverters PDFDokument13 Seiten1986 A New Synchronous Current Regulator and An Analysis of Current-Regulated PWM Inverters PDFdhirajlovesmaaNoch keine Bewertungen
- Qucs TrainingDokument2 SeitenQucs TrainingBala9130% (1)
- Lab Manual Electrical Machines Lab PTUKDokument151 SeitenLab Manual Electrical Machines Lab PTUKTareq FoQhaNoch keine Bewertungen
- Mpi Lab Manual (Exp 1 To 6)Dokument21 SeitenMpi Lab Manual (Exp 1 To 6)Swati Sharma VaishnavNoch keine Bewertungen
- Voltage Profile Improvement Using SVCDokument10 SeitenVoltage Profile Improvement Using SVCkubera uNoch keine Bewertungen
- Excel AldepDokument41 SeitenExcel AldepsalehNoch keine Bewertungen
- A High Efficiency Flyback Micro-Inverter With A New Adaptive Snubber For Photovoltaic ApplicationsDokument29 SeitenA High Efficiency Flyback Micro-Inverter With A New Adaptive Snubber For Photovoltaic ApplicationsChristian EmenikeNoch keine Bewertungen
- ABB and VestasDokument2 SeitenABB and Vestasfotopredic100% (1)
- Jntua B.tech 4-1 Eee r15 SyllabusDokument26 SeitenJntua B.tech 4-1 Eee r15 Syllabusaravind0% (1)
- MATPOWER - A MATLAB Power System Simulation PackageDokument35 SeitenMATPOWER - A MATLAB Power System Simulation Packageemanuelcnn38Noch keine Bewertungen
- Power Quality Improvement in Grid Connected PV SystemDokument6 SeitenPower Quality Improvement in Grid Connected PV SystemEditor IJTSRDNoch keine Bewertungen
- User'S Guide: Pvsyst Contextual HelpDokument232 SeitenUser'S Guide: Pvsyst Contextual HelpShubhra ShahNoch keine Bewertungen
- Tutorial - HEV Design SuiteDokument13 SeitenTutorial - HEV Design SuiteKidus DawitNoch keine Bewertungen
- Chapter 1Dokument48 SeitenChapter 1CharleneKronstedtNoch keine Bewertungen
- Embedded Model Predictive Control For An ESP On A PLCDokument7 SeitenEmbedded Model Predictive Control For An ESP On A PLCRhaclley AraújoNoch keine Bewertungen
- Taller 1Dokument4 SeitenTaller 1Andres Felipe Medina EaloNoch keine Bewertungen
- Chapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesDokument9 SeitenChapter 6 (CONT') : Application: Powers of Matrices and Their Applications. 1 Powers of MatricesHafeezul RaziqNoch keine Bewertungen
- Practice Test (1-10)Dokument40 SeitenPractice Test (1-10)tamNoch keine Bewertungen
- Quiz IiDokument9 SeitenQuiz IiElma FebrianaNoch keine Bewertungen
- Cross Wallpaper Iphone - Google SearchDokument1 SeiteCross Wallpaper Iphone - Google SearchWill ThompsonNoch keine Bewertungen
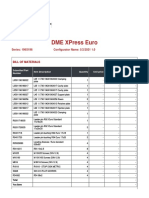
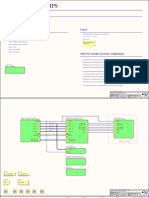
- Dme Xpress Euro: Series: 196X196 Configurator Name: 5/2/2021 1.0Dokument3 SeitenDme Xpress Euro: Series: 196X196 Configurator Name: 5/2/2021 1.0Ahmed SamirNoch keine Bewertungen
- AIO-3310/1/2 Analog Input and Multi-Function Digital I/O CardDokument15 SeitenAIO-3310/1/2 Analog Input and Multi-Function Digital I/O CardYagmur YükselNoch keine Bewertungen
- IR610Dokument10 SeitenIR610JorgeNoch keine Bewertungen
- Unit Test 7A: 1 Complete The Sentences With The Past Simple Form of The Verbs in BracketsDokument3 SeitenUnit Test 7A: 1 Complete The Sentences With The Past Simple Form of The Verbs in BracketsBüşraNoch keine Bewertungen
- Synthetic Hi-Temp GreaseDokument1 SeiteSynthetic Hi-Temp GreasetariNoch keine Bewertungen
- Probability Practice - 6TDokument5 SeitenProbability Practice - 6Tnguyenduckien054Noch keine Bewertungen
- mb1319 L433Dokument25 Seitenmb1319 L433Pablo RodriguezNoch keine Bewertungen
- Tir Lens Guide-Web PDFDokument8 SeitenTir Lens Guide-Web PDFFilozófus ÖnjelöltNoch keine Bewertungen
- Evaluation of Tenders and Selection of Preferred BidderDokument3 SeitenEvaluation of Tenders and Selection of Preferred Biddercute_prabudassNoch keine Bewertungen
- Histology: Neuron Cells Types and StructureDokument7 SeitenHistology: Neuron Cells Types and StructureAli HayderNoch keine Bewertungen
- Personalized CLO Applied Learning AssignmentDokument4 SeitenPersonalized CLO Applied Learning AssignmentNirajan MahatoNoch keine Bewertungen
- 10de Tieng AnhDokument144 Seiten10de Tieng AnhSix HoàngNoch keine Bewertungen
- Trasmision c-07Dokument12 SeitenTrasmision c-07Wilson BalbinNoch keine Bewertungen
- 2.2.8 Doctor Blade: A. Berni, M. Mennig, H. SchmidtDokument4 Seiten2.2.8 Doctor Blade: A. Berni, M. Mennig, H. SchmidtMan Roland 709Noch keine Bewertungen
- 6-Axis Motion Tracking For High-Performance Applications: BMI088: Data SheetDokument49 Seiten6-Axis Motion Tracking For High-Performance Applications: BMI088: Data Sheetzied touilNoch keine Bewertungen
- Determination of Settlement For Beam On Elastic Foundation by ETABS SoftwareDokument8 SeitenDetermination of Settlement For Beam On Elastic Foundation by ETABS SoftwareTabrez AhmedNoch keine Bewertungen
- Lecture Note C01 - Chapter 3 5 - Load and Stress Analysis Failures Resulting From Static LoadingDokument31 SeitenLecture Note C01 - Chapter 3 5 - Load and Stress Analysis Failures Resulting From Static LoadingHenry HongNoch keine Bewertungen
- SIGRADEDokument2 SeitenSIGRADErajpre1213Noch keine Bewertungen
- Components of Valve Assembly Shown 27 and 28. Ofthe Are Figures 37. Use Bottom-Up Approach AssemblyDokument2 SeitenComponents of Valve Assembly Shown 27 and 28. Ofthe Are Figures 37. Use Bottom-Up Approach AssemblyLuis Perez MarquezNoch keine Bewertungen
- Cover Letter & Resume Baba NiangDokument4 SeitenCover Letter & Resume Baba NiangBabacar NiangNoch keine Bewertungen
- GYFSTH-12OM3 OPTEG 12 FibersDokument3 SeitenGYFSTH-12OM3 OPTEG 12 FibersLeonisa GoezNoch keine Bewertungen
- FPC PullboxesDokument7 SeitenFPC PullboxesDGWNoch keine Bewertungen
- Mathematics8 q4 Mod5 BasicConceptsOfProbability v2Dokument26 SeitenMathematics8 q4 Mod5 BasicConceptsOfProbability v2Ella Turla100% (1)
- Trip Sheet Operational SupportDokument16 SeitenTrip Sheet Operational SupportVano PrambudiNoch keine Bewertungen