Das könnte Ihnen auch gefallen
- HVDC TransDokument67 SeitenHVDC Transjo100% (1)
- Busbar Eet414Dokument34 SeitenBusbar Eet414yahyeNoch keine Bewertungen
- Kicks and Gas MigrationDokument42 SeitenKicks and Gas MigrationJohnny Sanchez100% (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationVon EverandStudy of a reluctance magnetic gearbox for energy storage system applicationBewertung: 1 von 5 Sternen1/5 (1)
- Classical Approach to Constrained and Unconstrained Molecular DynamicsVon EverandClassical Approach to Constrained and Unconstrained Molecular DynamicsNoch keine Bewertungen
- Harmonic Resonance During Energizing Primary Restorative Transmission SystemsDokument14 SeitenHarmonic Resonance During Energizing Primary Restorative Transmission SystemsLuKas21cNoch keine Bewertungen
- IGCSE - Physics - MCQ 2 - Forces and ShapeDokument7 SeitenIGCSE - Physics - MCQ 2 - Forces and ShapeKyi Nue KhinNoch keine Bewertungen
- Industrial Training Technical Report: Universisti Teknikal Malaysia MelakaDokument37 SeitenIndustrial Training Technical Report: Universisti Teknikal Malaysia MelakajoNoch keine Bewertungen
- 4 André Gretler - ANSI Vs IEC APW ChileDokument74 Seiten4 André Gretler - ANSI Vs IEC APW ChileTopografia MecanicaNoch keine Bewertungen
- Audio-Frequency Generator PDFDokument5 SeitenAudio-Frequency Generator PDFverd leonardNoch keine Bewertungen
- The Journal of Engineering - 2018 - Hao - Reactive Power Optimisation of Distribution Network With Distributed GenerationDokument5 SeitenThe Journal of Engineering - 2018 - Hao - Reactive Power Optimisation of Distribution Network With Distributed GenerationJean Baptiste nkongoloNoch keine Bewertungen
- Anuar 2020 J. Phys. Conf. Ser. 1432 012009Dokument8 SeitenAnuar 2020 J. Phys. Conf. Ser. 1432 012009M Hassan BashirNoch keine Bewertungen
- Dynamic Simulation For Wind Farm in A Large Power System: January 2009Dokument7 SeitenDynamic Simulation For Wind Farm in A Large Power System: January 2009Merera TaresaNoch keine Bewertungen
- Selection of CapacitorsDokument9 SeitenSelection of CapacitorsbatchurajaNoch keine Bewertungen
- Study of Transient Angle Stability in Microgrids With Synchronous Generation Through Comparative Analysis of Operating ScenariosDokument18 SeitenStudy of Transient Angle Stability in Microgrids With Synchronous Generation Through Comparative Analysis of Operating Scenariosipazmino2353Noch keine Bewertungen
- A Closed Loop Quasi Optical Dynamic Brak PDFDokument8 SeitenA Closed Loop Quasi Optical Dynamic Brak PDFDante FilhoNoch keine Bewertungen
- O Engineers 3rd Issue Oct 2017Dokument51 SeitenO Engineers 3rd Issue Oct 2017arsalanhamidNoch keine Bewertungen
- Qaid 2021 IOP Conf. Ser. Mater. Sci. Eng. 1127 012034Dokument9 SeitenQaid 2021 IOP Conf. Ser. Mater. Sci. Eng. 1127 012034salemg82Noch keine Bewertungen
- Transient Stability For IEEE 14 Bus Power System Using Power WorldDokument8 SeitenTransient Stability For IEEE 14 Bus Power System Using Power Worldcristian_miranda_mNoch keine Bewertungen
- Wind Turbine Efficiency and Grid Code Requirements: Dr. Arshad Ali Assistant ProfessorDokument35 SeitenWind Turbine Efficiency and Grid Code Requirements: Dr. Arshad Ali Assistant ProfessorIbn e Adam100% (1)
- Analog Ee-1Dokument9 SeitenAnalog Ee-1Shubham EdlaNoch keine Bewertungen
- R.M. EE College of Eng., King 11421, Saudi Arabia EE of Shams University, EgyptDokument5 SeitenR.M. EE College of Eng., King 11421, Saudi Arabia EE of Shams University, Egyptmarcelo_oliveira_limaNoch keine Bewertungen
- Long-Term Frequency Stability Assessment Based On Extended Frequency Response ModelDokument12 SeitenLong-Term Frequency Stability Assessment Based On Extended Frequency Response ModeltusharshharmaNoch keine Bewertungen
- Transient Stability of Power System Integrated With Doubly Fed Induction Generator Wind FarmsDokument11 SeitenTransient Stability of Power System Integrated With Doubly Fed Induction Generator Wind FarmsAyaz ChowdhuryNoch keine Bewertungen
- Design, Control and Experimental Investigation of Fault-Tolerant Five Phase PMSG For Wind Power ApplicationDokument16 SeitenDesign, Control and Experimental Investigation of Fault-Tolerant Five Phase PMSG For Wind Power ApplicationTJPRC PublicationsNoch keine Bewertungen
- Phase Angle Calculation Dynamics of Type 4 Wind Turbines in RMS Simulations During Severe Voltage DipsDokument16 SeitenPhase Angle Calculation Dynamics of Type 4 Wind Turbines in RMS Simulations During Severe Voltage DipsErandikaNoch keine Bewertungen
- Funnab Dr. Mathew EditedDokument30 SeitenFunnab Dr. Mathew EditedATILOLA SILASNoch keine Bewertungen
- Solly Aryza - Novelty Stability of Electrical System Single Machine Based Runge Kutta Orde 4 Method PDFDokument6 SeitenSolly Aryza - Novelty Stability of Electrical System Single Machine Based Runge Kutta Orde 4 Method PDFAndysah Putra Utama SiahaanNoch keine Bewertungen
- Vibration Energy Harvesting On Vehicle SuspensionDokument7 SeitenVibration Energy Harvesting On Vehicle SuspensionsahayaNoch keine Bewertungen
- Electical Power Systems Operation and Control: GMP Review April 2015Dokument9 SeitenElectical Power Systems Operation and Control: GMP Review April 2015Valeria TejenaNoch keine Bewertungen
- Application of STATCOM To Increase Transient Stability of Wind FarmDokument7 SeitenApplication of STATCOM To Increase Transient Stability of Wind FarmsirageldeenNoch keine Bewertungen
- Resposta de Inércia de Geradores Eólicos de Ímã Permanente Baseados em Conversor de Potência TotalDokument8 SeitenResposta de Inércia de Geradores Eólicos de Ímã Permanente Baseados em Conversor de Potência TotalDaniel reisNoch keine Bewertungen
- 2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet ManjhiDokument10 Seiten2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet Manjhirobertovm2002Noch keine Bewertungen
- Transient Stability Simulation of 33 KV Power Grid: Nader Barsoum, Nadira Zulkeffley, Myjessie SongkinDokument18 SeitenTransient Stability Simulation of 33 KV Power Grid: Nader Barsoum, Nadira Zulkeffley, Myjessie SongkinAnuroop BansodNoch keine Bewertungen
- 769 775 Vahidi - Tavakoli - SI - PaperDokument7 Seiten769 775 Vahidi - Tavakoli - SI - PaperMohamed AlNoch keine Bewertungen
- Transient Stability Analysis For 6 Bus System Using E-TapDokument10 SeitenTransient Stability Analysis For 6 Bus System Using E-TapSaran KuttyNoch keine Bewertungen
- Wind Turbine Modelling and Simulation Using Matlab / SIMULINKDokument10 SeitenWind Turbine Modelling and Simulation Using Matlab / SIMULINKDuy DươngNoch keine Bewertungen
- Transient Stability Analysis of Power Systems (Excel)Dokument17 SeitenTransient Stability Analysis of Power Systems (Excel)Márcio TamashiroNoch keine Bewertungen
- Chowdhury 2020Dokument4 SeitenChowdhury 2020Hiba Nadhim AmeenNoch keine Bewertungen
- Wind Driven Mobile Charging of Automobile BatteryDokument7 SeitenWind Driven Mobile Charging of Automobile BatteryAshvanth Ramesh100% (1)
- A Shoe Equipped Linear Generator For Energy HarvestingDokument7 SeitenA Shoe Equipped Linear Generator For Energy HarvestingDavid SilveraNoch keine Bewertungen
- Dire-Dawa University Institute of TechnologyDokument71 SeitenDire-Dawa University Institute of TechnologyChalachew1212 mezgebuNoch keine Bewertungen
- Improved Three Phase Single Phase Torque Cancellation IEEEAccess2021Dokument10 SeitenImproved Three Phase Single Phase Torque Cancellation IEEEAccess2021DEBARATI DAMNoch keine Bewertungen
- Electrical Power Generation Through Speed Breaker: December 2016Dokument5 SeitenElectrical Power Generation Through Speed Breaker: December 2016vs sivaNoch keine Bewertungen
- Design, Analysis and Performance Investigation of Electro Magnetic EngineDokument2 SeitenDesign, Analysis and Performance Investigation of Electro Magnetic Engineu2005044Noch keine Bewertungen
- System Study and Fault Level Reduction Techniques For A Small Scale Power Plant in ThailandDokument8 SeitenSystem Study and Fault Level Reduction Techniques For A Small Scale Power Plant in ThailandAmit NagNoch keine Bewertungen
- Small-Signal Stability of Wind Turbine by Using Direct-Drive PMSG Connected To Power GridDokument6 SeitenSmall-Signal Stability of Wind Turbine by Using Direct-Drive PMSG Connected To Power Gridashikhmd4467Noch keine Bewertungen
- Coordinated Control of Reactive Power Between STATDokument11 SeitenCoordinated Control of Reactive Power Between STATbhargavNoch keine Bewertungen
- 2 ND Control - of - Photovoltaic - Inverters - For - Transient - and - Voltage - Stability - EnhancementDokument18 Seiten2 ND Control - of - Photovoltaic - Inverters - For - Transient - and - Voltage - Stability - Enhancementsayali kthalkarNoch keine Bewertungen
- 08253281-Ok-KimhokDokument6 Seiten08253281-Ok-KimhokRicho TetukoNoch keine Bewertungen
- 10 11648 J Sjee 20200804 11Dokument10 Seiten10 11648 J Sjee 20200804 11Apila NiangaNoch keine Bewertungen
- Cep PsocDokument31 SeitenCep PsocEhtisham RajpootNoch keine Bewertungen
- Study The Effects of Power Plant Unit Outages On MDokument8 SeitenStudy The Effects of Power Plant Unit Outages On Mgaurav rawatNoch keine Bewertungen
- Electrical Power and Energy Systems: Maghsoud Mokhtari, Javad Khazaei, Daryoosh NazarpourDokument8 SeitenElectrical Power and Energy Systems: Maghsoud Mokhtari, Javad Khazaei, Daryoosh NazarpourAnh TuanNoch keine Bewertungen
- Elearnica Ir Sub Synchronous ResDokument8 SeitenElearnica Ir Sub Synchronous ResGanesh DuraisamyNoch keine Bewertungen
- Optimization 5 × 195 KW Chiller Compressor Motor With ETAPDokument8 SeitenOptimization 5 × 195 KW Chiller Compressor Motor With ETAP陆华林Noch keine Bewertungen
- Performance Analysis of Self-Excited Induction Generator Connected To A Micro Hydro TurbineDokument5 SeitenPerformance Analysis of Self-Excited Induction Generator Connected To A Micro Hydro TurbineerpublicationNoch keine Bewertungen
- Proposed Scheme For Plugging Three-Phase Induction Motor: January 2010Dokument6 SeitenProposed Scheme For Plugging Three-Phase Induction Motor: January 2010Bilal HBNoch keine Bewertungen
- Khan2020 Article IntelligentControlOfANovelTranDokument15 SeitenKhan2020 Article IntelligentControlOfANovelTranPablo Omar Luz PedemonteNoch keine Bewertungen
- Reliability Evaluation For Different Power Plant Busbar Layouts by Using Sequential Monte Carlo Simulation PDFDokument7 SeitenReliability Evaluation For Different Power Plant Busbar Layouts by Using Sequential Monte Carlo Simulation PDFAkash AliNoch keine Bewertungen
- Impact of SCIG, DFIG Wind Power Plant On IEEE 14 Bus System With Small Signal Stability AssessmentDokument6 SeitenImpact of SCIG, DFIG Wind Power Plant On IEEE 14 Bus System With Small Signal Stability AssessmentMayukha sri vasaviNoch keine Bewertungen
- On The Modeling and Control of A Novel Flywheel Energy Storage SystemDokument7 SeitenOn The Modeling and Control of A Novel Flywheel Energy Storage SystemSantiago Bonilla RiveraNoch keine Bewertungen
- Transient Stability Analysis of The IEEE 14-Bus Electric Power System PDFDokument10 SeitenTransient Stability Analysis of The IEEE 14-Bus Electric Power System PDFMary MorseNoch keine Bewertungen
- Generation Planning Model Including FrequencyDokument6 SeitenGeneration Planning Model Including FrequencySchult JohsNoch keine Bewertungen
- Miao2013 Article TransientStabilityRiskAssessme PDFDokument8 SeitenMiao2013 Article TransientStabilityRiskAssessme PDFTana AzeezNoch keine Bewertungen
- Transient Stability Risk Assessment of Power Systems Incorporating Wind FarmsDokument8 SeitenTransient Stability Risk Assessment of Power Systems Incorporating Wind FarmsnarimanNoch keine Bewertungen
- Adaptive Mho Relay For Synchronous Generator Loss-Of-Excitation Protection A Capability Curve Limit-Based ApproachDokument9 SeitenAdaptive Mho Relay For Synchronous Generator Loss-Of-Excitation Protection A Capability Curve Limit-Based ApproachRodNoch keine Bewertungen
- Power Fluctuation Alleviation Using Cascade Statcoms With Energy Storages For Wind Farm ApplicationsDokument6 SeitenPower Fluctuation Alleviation Using Cascade Statcoms With Energy Storages For Wind Farm ApplicationsjoNoch keine Bewertungen
- Improvement of Voltage Stability Due To Integration of The Celukan Bawang Power Station To The Bali 16-Bus SystemDokument5 SeitenImprovement of Voltage Stability Due To Integration of The Celukan Bawang Power Station To The Bali 16-Bus SystemjoNoch keine Bewertungen
- Microcontroller Based Digital Code Lock: Bachelor of TechnologyDokument50 SeitenMicrocontroller Based Digital Code Lock: Bachelor of TechnologyjoNoch keine Bewertungen
- Power Quality Improvement Using Facts Device (Statcom)Dokument6 SeitenPower Quality Improvement Using Facts Device (Statcom)joNoch keine Bewertungen
- 179 Load IeeeDokument7 Seiten179 Load IeeejoNoch keine Bewertungen
- Akas Engineering and Trading SDN BHD - Kepala Batas. Penang. MalaysiaDokument5 SeitenAkas Engineering and Trading SDN BHD - Kepala Batas. Penang. MalaysiajoNoch keine Bewertungen
- Sensors: Real-Time Performance of A Self-Powered Environmental Iot Sensor Network SystemDokument14 SeitenSensors: Real-Time Performance of A Self-Powered Environmental Iot Sensor Network SystemjoNoch keine Bewertungen
- 17 AppendicesDokument18 Seiten17 AppendicesjoNoch keine Bewertungen
- Chap 9Dokument64 SeitenChap 9joNoch keine Bewertungen
- Street LightDokument4 SeitenStreet LightjoNoch keine Bewertungen
- Chap 6 SolnsDokument2 SeitenChap 6 SolnsjoNoch keine Bewertungen
- 925-General Donation PDFDokument1 Seite925-General Donation PDFjoNoch keine Bewertungen
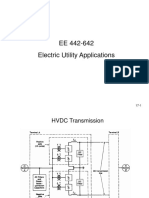
- Utility ApplicationsDokument28 SeitenUtility ApplicationsjoNoch keine Bewertungen
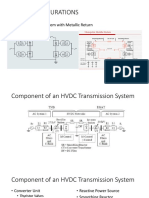
- HVDC Configurations: Monopolar HVDC System With Metallic ReturnDokument4 SeitenHVDC Configurations: Monopolar HVDC System With Metallic ReturnjoNoch keine Bewertungen
- Ch17 PDFDokument18 SeitenCh17 PDFjoNoch keine Bewertungen
- Nptel: High Voltage DC Transmission - Web CourseDokument2 SeitenNptel: High Voltage DC Transmission - Web Coursekmd_venkatsubbu0% (1)
- Exercise: Xercise BjectiveDokument36 SeitenExercise: Xercise BjectivejoNoch keine Bewertungen
- HW3 B SolutionsDokument7 SeitenHW3 B SolutionsAli Abbas SheriffNoch keine Bewertungen
- PKA-RP2.5FAL Pka-Rp3Fal Pka-Rp4Fal: Technical & Service ManualDokument56 SeitenPKA-RP2.5FAL Pka-Rp3Fal Pka-Rp4Fal: Technical & Service ManualMihaela CaciumarciucNoch keine Bewertungen
- Compressor HC-4E1Dokument60 SeitenCompressor HC-4E1emanuelNoch keine Bewertungen
- Chapter 2 Kinematics: Quick Check (Page 23)Dokument4 SeitenChapter 2 Kinematics: Quick Check (Page 23)muhammad aliNoch keine Bewertungen
- Energetica ExaminationDokument11 SeitenEnergetica ExaminationDwi NicHeNoch keine Bewertungen
- Modul 2.3 Physics Form 4 - AnswerDokument6 SeitenModul 2.3 Physics Form 4 - AnswerNURSHAFAZLEEN BINTI AK DAMIT KPM-GuruNoch keine Bewertungen
- CH 15 C 11 Marks 1 and 2 QuesDokument7 SeitenCH 15 C 11 Marks 1 and 2 QuesVikrant Shivajirao SambheraoNoch keine Bewertungen
- Trio 27Dokument0 SeitenTrio 27Cristi GrosuNoch keine Bewertungen
- Mass Volume Density Notes PDFDokument17 SeitenMass Volume Density Notes PDFNadya PutriNoch keine Bewertungen
- Math Seminar 2022Dokument9 SeitenMath Seminar 2022Joefoe JalandoniNoch keine Bewertungen
- Total Power Int'L: S2A00R Series 3 Watt Low Cost DIP DC/DC Converters Single & Dual OutputDokument4 SeitenTotal Power Int'L: S2A00R Series 3 Watt Low Cost DIP DC/DC Converters Single & Dual OutputsaberNoch keine Bewertungen
- Week 2 - Piping Friction Loss 1t 2022-2023Dokument113 SeitenWeek 2 - Piping Friction Loss 1t 2022-2023Mcoy DomingoNoch keine Bewertungen
- AccelerometerDokument2 SeitenAccelerometerlasky11Noch keine Bewertungen
- E2488 092014 Standard Guide ForDokument8 SeitenE2488 092014 Standard Guide ForBAN ZANGHANANoch keine Bewertungen
- Speed QuizDokument2 SeitenSpeed QuizKhairi SharifuddinNoch keine Bewertungen
- Phylion36V11 6AhSF 06SmartBMSSpecificationDokument11 SeitenPhylion36V11 6AhSF 06SmartBMSSpecificationIstván PatakiNoch keine Bewertungen
- Module 2 Dynamics Roller Coaster Depth Study 63174ef8a89d4Dokument16 SeitenModule 2 Dynamics Roller Coaster Depth Study 63174ef8a89d4Athul JitheshNoch keine Bewertungen
- Synchronous Non Excited Reluctance MotorDokument14 SeitenSynchronous Non Excited Reluctance Motorcamming soonNoch keine Bewertungen
- Ild1, Ild2, Ild5, Ilq1, Ilq2: Vishay SemiconductorsDokument10 SeitenIld1, Ild2, Ild5, Ilq1, Ilq2: Vishay SemiconductorsTan Hung LuuNoch keine Bewertungen
- YASKAWA AC Drive V1000: Quick Start GuideDokument46 SeitenYASKAWA AC Drive V1000: Quick Start GuideMaria TzagarakiNoch keine Bewertungen
- Final ProjectDokument37 SeitenFinal ProjectManirathnam KarumanchiNoch keine Bewertungen
- Solar Sites New EASS DocumentsDokument11 SeitenSolar Sites New EASS Documentsi070120100% (1)
- Application Problems 1Dokument3 SeitenApplication Problems 1DianaLaura AlvarezNoch keine Bewertungen
- Kinematics 1Dokument6 SeitenKinematics 1Shiva Ram Prasad PulagamNoch keine Bewertungen
- ThermodynamicsDokument83 SeitenThermodynamicsRhea BakiNoch keine Bewertungen