Das könnte Ihnen auch gefallen
- Email: ,: Vanfrl@rpi - EduDokument2 SeitenEmail: ,: Vanfrl@rpi - EduPritam YaduvanshiNoch keine Bewertungen
- Low-Complexity Iterative Sinusoidal Parameter EstimationDokument8 SeitenLow-Complexity Iterative Sinusoidal Parameter EstimationPritam YaduvanshiNoch keine Bewertungen
- Speed and Torque Control of A DC Shunt Motor: October 2009Dokument11 SeitenSpeed and Torque Control of A DC Shunt Motor: October 2009Pritam YaduvanshiNoch keine Bewertungen
- Bidirectional DC-DC Converter Fed Drive For Electric Vehicle SystemDokument10 SeitenBidirectional DC-DC Converter Fed Drive For Electric Vehicle SystemPritam YaduvanshiNoch keine Bewertungen
- Adc and Dac Converters: BY:-PULKIT PARASHAR (17BEE080), Pritam Yaduvanshi (17bee079) Guide:-Prof. Akhilesh NimjeDokument9 SeitenAdc and Dac Converters: BY:-PULKIT PARASHAR (17BEE080), Pritam Yaduvanshi (17bee079) Guide:-Prof. Akhilesh NimjePritam YaduvanshiNoch keine Bewertungen
- 481 ResultsDokument3 Seiten481 ResultsPritam YaduvanshiNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Vocations The New Midheaven Extension ProcessDokument266 SeitenVocations The New Midheaven Extension ProcessMiss M.100% (24)
- The BetterPhoto Guide To Creative Digital Photography by Jim Miotke and Kerry Drager - ExcerptDokument19 SeitenThe BetterPhoto Guide To Creative Digital Photography by Jim Miotke and Kerry Drager - ExcerptCrown Publishing GroupNoch keine Bewertungen
- Dialog InggrisDokument4 SeitenDialog Inggrisبايو سيتياوانNoch keine Bewertungen
- Paramount Healthcare Management Private Limited: First Reminder Letter Without PrejudiceDokument1 SeiteParamount Healthcare Management Private Limited: First Reminder Letter Without PrejudiceSwapnil TiwariNoch keine Bewertungen
- Test Bank For Macroeconomics For Life Smart Choices For All2nd Edition Avi J Cohen DownloadDokument74 SeitenTest Bank For Macroeconomics For Life Smart Choices For All2nd Edition Avi J Cohen Downloadmichaelmarshallmiwqxteyjb100% (28)
- Why File A Ucc1Dokument10 SeitenWhy File A Ucc1kbarn389100% (4)
- Homework 1Dokument8 SeitenHomework 1Yooncheul JeungNoch keine Bewertungen
- MV Lec PDFDokument102 SeitenMV Lec PDFJonas Datu100% (1)
- Eng21 (Story of Hamguchi Gohei)Dokument9 SeitenEng21 (Story of Hamguchi Gohei)Alapan NandaNoch keine Bewertungen
- Nuclear Power Engineering (MEE 2027) : Fall Semester (2020-2021)Dokument13 SeitenNuclear Power Engineering (MEE 2027) : Fall Semester (2020-2021)AllNoch keine Bewertungen
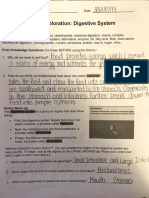
- Student Exploration: Digestive System: Food Inio Simple Nutrien/oDokument9 SeitenStudent Exploration: Digestive System: Food Inio Simple Nutrien/oAshantiNoch keine Bewertungen
- 200150, 200155 & 200157 Accelerometers: DescriptionDokument16 Seiten200150, 200155 & 200157 Accelerometers: DescriptionJOSE MARIA DANIEL CANALESNoch keine Bewertungen
- A Review of Mechanism Used in Laparoscopic Surgical InstrumentsDokument15 SeitenA Review of Mechanism Used in Laparoscopic Surgical InstrumentswafasahilahNoch keine Bewertungen
- Advent Wreath Lesson PlanDokument2 SeitenAdvent Wreath Lesson Planapi-359764398100% (1)
- Formal Letter LPDokument2 SeitenFormal Letter LPLow Eng Han100% (1)
- ISO - 21.060.10 - Bolts, Screws, Studs (List of Codes)Dokument9 SeitenISO - 21.060.10 - Bolts, Screws, Studs (List of Codes)duraisingh.me6602Noch keine Bewertungen
- Participate in Safe Food Handling Practices SITXFSA002 - PowerpointDokument71 SeitenParticipate in Safe Food Handling Practices SITXFSA002 - PowerpointJuan Diego Pulgarín Henao100% (2)
- Practical Cs Xii Mysql 2022-23 FinalDokument9 SeitenPractical Cs Xii Mysql 2022-23 FinalHimanshu GuptaNoch keine Bewertungen
- Financial Accounting 1: Chapter 5 Cash and Short Term InvestmentDokument31 SeitenFinancial Accounting 1: Chapter 5 Cash and Short Term InvestmentCabdiraxmaan GeeldoonNoch keine Bewertungen
- AcousticsDokument122 SeitenAcousticsEclipse YuNoch keine Bewertungen
- Fire Technical Examples DIFT No 30Dokument27 SeitenFire Technical Examples DIFT No 30Daniela HanekováNoch keine Bewertungen
- QuinnmcfeetersresumeDokument1 SeiteQuinnmcfeetersresumeapi-510833585Noch keine Bewertungen
- AstmDokument5 SeitenAstmyanurarzaqaNoch keine Bewertungen
- Laboratorio 1Dokument6 SeitenLaboratorio 1Marlon DiazNoch keine Bewertungen
- Toi Su20 Sat Epep ProposalDokument7 SeitenToi Su20 Sat Epep ProposalTalha SiddiquiNoch keine Bewertungen
- Final Prmy Gr4 Math Ph1 HWSHDokument55 SeitenFinal Prmy Gr4 Math Ph1 HWSHKarthik KumarNoch keine Bewertungen
- Aquaculture - Set BDokument13 SeitenAquaculture - Set BJenny VillamorNoch keine Bewertungen
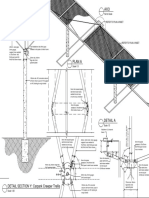
- TrellisDokument1 SeiteTrellisCayenne LightenNoch keine Bewertungen
- Functions: Var S AddDokument13 SeitenFunctions: Var S AddRevati MenghaniNoch keine Bewertungen
- CoSiO2 For Fischer-Tropsch Synthesis Comparison...Dokument5 SeitenCoSiO2 For Fischer-Tropsch Synthesis Comparison...Genesis CalderónNoch keine Bewertungen