Das könnte Ihnen auch gefallen
- Princípios de Funcionamento de GeradoresDokument13 SeitenPrincípios de Funcionamento de GeradoresArcenio Artur MunguambeNoch keine Bewertungen
- Implementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoVon EverandImplementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoNoch keine Bewertungen
- Acionamento elétrico MIT chave compensadoraDokument9 SeitenAcionamento elétrico MIT chave compensadoraMarco Aurélio França100% (1)
- Projetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte ViVon EverandProjetos Em Clp Ladder Baseado Na Placa Arduino Uno Parte ViNoch keine Bewertungen
- Ficha 4 - EXERCICIOS SOBRE ERROS NA MEDIÇÃODokument2 SeitenFicha 4 - EXERCICIOS SOBRE ERROS NA MEDIÇÃORodrigues Antonio Nabo100% (1)
- 5-Controle-I-Modelagem Matemática de Sistemas Elétricos e Mecânicos PDFDokument36 Seiten5-Controle-I-Modelagem Matemática de Sistemas Elétricos e Mecânicos PDFLucas NunesNoch keine Bewertungen
- Aplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoVon EverandAplicando Iot Para Medir Célula De Carga Com Esp8266 (nodemcu) Programado Em ArduinoNoch keine Bewertungen
- Partida direta motor elétricoDokument2 SeitenPartida direta motor elétricoJosé Ronaldo Tavares SantosNoch keine Bewertungen
- Esquema de Força e Comando Chave Compensadora Com ReversãoDokument18 SeitenEsquema de Força e Comando Chave Compensadora Com ReversãomateusheNoch keine Bewertungen
- Fluxo de potência: Teoria e implementação de códigos computacionaisVon EverandFluxo de potência: Teoria e implementação de códigos computacionaisNoch keine Bewertungen
- Operação de cicloconversores e controle de tensão de saídaDokument7 SeitenOperação de cicloconversores e controle de tensão de saídaDaniel OliboniNoch keine Bewertungen
- Sistema Trifasico EquilibradoDokument20 SeitenSistema Trifasico EquilibradomewiceNoch keine Bewertungen
- Esquema de Controle Fonte Tl494Dokument8 SeitenEsquema de Controle Fonte Tl494Charlene GomesNoch keine Bewertungen
- Campo GiranteDokument9 SeitenCampo GiranteLuciano FranklinNoch keine Bewertungen
- ConversãoDokument43 SeitenConversãoRamon ResendeNoch keine Bewertungen
- RealimentaçãoDokument22 SeitenRealimentaçãorfsoc100% (2)
- Lógica Sequencial - CIs Contadores e ExercíciosDokument93 SeitenLógica Sequencial - CIs Contadores e ExercíciosLuiz Paulo OliveiraNoch keine Bewertungen
- Máquinas Elétricas - Capítulo 2Dokument46 SeitenMáquinas Elétricas - Capítulo 2Eletnews100% (2)
- Apontamentos-Maquinas SíncronasDokument14 SeitenApontamentos-Maquinas SíncronasGïldö Aügüstö PächyNoch keine Bewertungen
- Lista 2 SEP 1Dokument3 SeitenLista 2 SEP 1Leticia Ferreira0% (2)
- Contadores AssincronosDokument30 SeitenContadores AssincronosGabriel ConjoNoch keine Bewertungen
- Características Motor CC com CargaDokument13 SeitenCaracterísticas Motor CC com CargaEric do ValeNoch keine Bewertungen
- Atividade 4 - Acionamentos Elétricos - 51-2023Dokument5 SeitenAtividade 4 - Acionamentos Elétricos - 51-2023Cavalini Assessoria AcadêmicaNoch keine Bewertungen
- Relatório 5 - Amplificador Operacional SintonizadoDokument8 SeitenRelatório 5 - Amplificador Operacional SintonizadoAdriane França100% (1)
- Aula 1 - Partida Estrela-TriânguloDokument3 SeitenAula 1 - Partida Estrela-TriânguloLeandro Tomé MartinsNoch keine Bewertungen
- Laboratório 3 Transformador Monofásico. EnsaiosDokument17 SeitenLaboratório 3 Transformador Monofásico. EnsaiosgersonhzpNoch keine Bewertungen
- Motor UniversalDokument6 SeitenMotor UniversalEuclides ReisNoch keine Bewertungen
- Determinação da Polaridade de Transformadores Monofásicos Através do Método de Corrente AlternadaDokument13 SeitenDeterminação da Polaridade de Transformadores Monofásicos Através do Método de Corrente AlternadaCarloss PakinyNoch keine Bewertungen
- Relatório Motores MonofásicosDokument14 SeitenRelatório Motores MonofásicosVictor SaidNoch keine Bewertungen
- Aula 3bDokument41 SeitenAula 3bGustavo Prado100% (1)
- Principio de Funcionamento Das Maquinas Eletricas PDFDokument47 SeitenPrincipio de Funcionamento Das Maquinas Eletricas PDFRodrigo LuizettoNoch keine Bewertungen
- Conjunto para Estudo de Geração, Transmissão e Distribuição de Energia ElétricaDokument47 SeitenConjunto para Estudo de Geração, Transmissão e Distribuição de Energia ElétricaCaio de MoraesNoch keine Bewertungen
- Análise do funcionamento e propriedades de um amplificador diferencialDokument8 SeitenAnálise do funcionamento e propriedades de um amplificador diferencialMarco Vinicius Uchida MeloNoch keine Bewertungen
- Demanda provável e demanda da instalaçãoDokument8 SeitenDemanda provável e demanda da instalaçãoLucas José de SouzaNoch keine Bewertungen
- Impedâncias Gerador SincronoDokument3 SeitenImpedâncias Gerador SincronoAnibalVargasNoch keine Bewertungen
- 4 - Apostila de Maquinas EletricasDokument111 Seiten4 - Apostila de Maquinas EletricasJediel Vagne da SilvaNoch keine Bewertungen
- Transformadores - ExercíciosDokument16 SeitenTransformadores - ExercíciosMagno MonteiroNoch keine Bewertungen
- Medição de potência trifásica usando a conexão de AronDokument5 SeitenMedição de potência trifásica usando a conexão de AronTiago Vinhati PirolaNoch keine Bewertungen
- 01 - Maquinas Elétricas - Conceito PDFDokument100 Seiten01 - Maquinas Elétricas - Conceito PDFCelso Ciamponi100% (1)
- Transformadores de potência: exercícios sobre circuitos equivalentes e cálculo de grandezas elétricasDokument7 SeitenTransformadores de potência: exercícios sobre circuitos equivalentes e cálculo de grandezas elétricasesierra20Noch keine Bewertungen
- Exercícios CC Máquinas Corrente ContínuaDokument3 SeitenExercícios CC Máquinas Corrente ContínuaMarcos CiriloNoch keine Bewertungen
- Teoria de Controle I: Analogia de Sistemas Mecânicos e ElétricosDokument23 SeitenTeoria de Controle I: Analogia de Sistemas Mecânicos e ElétricosLucas NunesNoch keine Bewertungen
- Medidores elétricosDokument9 SeitenMedidores elétricosHelio Betim Dos SantosNoch keine Bewertungen
- Motores de Indução Trifásicos: Partida e Circuito EquivalenteDokument56 SeitenMotores de Indução Trifásicos: Partida e Circuito Equivalentedriano22100% (1)
- Máquinas de Indução: Construção, Conceitos e Escorregamento do RotorDokument30 SeitenMáquinas de Indução: Construção, Conceitos e Escorregamento do RotorWagner Menezes100% (1)
- Aplicação experimental do teorema da superposiçãoDokument15 SeitenAplicação experimental do teorema da superposiçãoEdio JuniorNoch keine Bewertungen
- Projeto de chaveta paralela para árvore de 49 mm de diâmetroDokument4 SeitenProjeto de chaveta paralela para árvore de 49 mm de diâmetroEder CoserNoch keine Bewertungen
- Relatório 3 - Amplificador Classe ABDokument25 SeitenRelatório 3 - Amplificador Classe ABJader Vinicius Nascimento0% (1)
- Métodos de Partida de Motores de Indução TrifásicosDokument5 SeitenMétodos de Partida de Motores de Indução TrifásicosFelipe KuchenbeckerNoch keine Bewertungen
- Lista 1 Exercícios de Medidas de ConfiabilidadeDokument1 SeiteLista 1 Exercícios de Medidas de ConfiabilidadeIsabelle Carrupt0% (1)
- Relatório 2 PARTIDA COMPENSADORAintrodução KleberDokument6 SeitenRelatório 2 PARTIDA COMPENSADORAintrodução KleberSaulo Câmara100% (2)
- Aula 01 - Introdução A Comandos ElétricosDokument39 SeitenAula 01 - Introdução A Comandos ElétricosPrisciane De Paula MouzinhoNoch keine Bewertungen
- Proteção de motores elétricos IFPE Campus PesqueiraDokument9 SeitenProteção de motores elétricos IFPE Campus PesqueiraWilliam TenórioNoch keine Bewertungen
- Aula 24nov - QuadripolosDokument39 SeitenAula 24nov - QuadripolosTiago LeiteNoch keine Bewertungen
- Apostila Automacao CLP LogoDokument132 SeitenApostila Automacao CLP LogoJosé Roberto StanganiniNoch keine Bewertungen
- Relatório Máquina CCDokument29 SeitenRelatório Máquina CCAdrian AlanNoch keine Bewertungen
- O Que É Qual A Função Do NúcleoDokument2 SeitenO Que É Qual A Função Do NúcleoMilton ManjateNoch keine Bewertungen
- UD44 - MANUTENÇÃOver2Dokument17 SeitenUD44 - MANUTENÇÃOver2Milton ManjateNoch keine Bewertungen
- Tabela ComparaçaoDokument2 SeitenTabela ComparaçaoMilton ManjateNoch keine Bewertungen
- RoamingDokument11 SeitenRoamingMilton ManjateNoch keine Bewertungen
- HidraulicaDokument15 SeitenHidraulicaMilton ManjateNoch keine Bewertungen
- RCM e AvariasDokument28 SeitenRCM e AvariasAnisio ManhiçaNoch keine Bewertungen
- Actividade Tipos de AvaliacaoDokument1 SeiteActividade Tipos de AvaliacaoMilton ManjateNoch keine Bewertungen
- Algorítmos de SequenciamentoDokument16 SeitenAlgorítmos de SequenciamentoMilton ManjateNoch keine Bewertungen
- Trabalho de EstatiscaDokument15 SeitenTrabalho de EstatiscaMilton ManjateNoch keine Bewertungen
- Modelos de ManutençãoDokument29 SeitenModelos de ManutençãoMilton ManjateNoch keine Bewertungen
- Manutenção AutónomaDokument32 SeitenManutenção AutónomaMilton ManjateNoch keine Bewertungen
- Trabalho 2 AcionamentoDokument9 SeitenTrabalho 2 AcionamentoMilton ManjateNoch keine Bewertungen
- RCM e AvariasDokument28 SeitenRCM e AvariasAnisio ManhiçaNoch keine Bewertungen
- Planos de ManutençãoDokument41 SeitenPlanos de ManutençãoMilton ManjateNoch keine Bewertungen
- ISDB - Evolução histórica da ManutençãoDokument33 SeitenISDB - Evolução histórica da ManutençãoMilton ManjateNoch keine Bewertungen
- UD44 - MANUTENÇÃOver2Dokument17 SeitenUD44 - MANUTENÇÃOver2Milton ManjateNoch keine Bewertungen
- Dimensionamento de dispositivos de acionamento de motor trifásicoDokument11 SeitenDimensionamento de dispositivos de acionamento de motor trifásicoMilton Manjate100% (1)
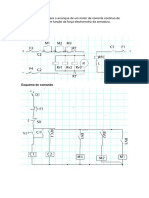
- Motor CC excitação compostaDokument12 SeitenMotor CC excitação compostaMilton ManjateNoch keine Bewertungen
- Acionamento e Controle de Motores CC de Excitação CompostaDokument40 SeitenAcionamento e Controle de Motores CC de Excitação CompostaMilton ManjateNoch keine Bewertungen
- Rectificadores SemicontroladosDokument17 SeitenRectificadores SemicontroladosMilton ManjateNoch keine Bewertungen
- Trabalho Grupo Op 7-1Dokument7 SeitenTrabalho Grupo Op 7-1Milton ManjateNoch keine Bewertungen
- Acionamento de Motores de Corrente Continua de Excitação CompostaDokument40 SeitenAcionamento de Motores de Corrente Continua de Excitação CompostaMilton ManjateNoch keine Bewertungen
- Conversores CC monofásicos e trifásicos semi-controladosDokument6 SeitenConversores CC monofásicos e trifásicos semi-controladosMilton ManjateNoch keine Bewertungen
- Dimensionamento de dispositivos de acionamento de motor trifásicoDokument11 SeitenDimensionamento de dispositivos de acionamento de motor trifásicoMilton Manjate100% (1)
- Análise de falhas em equipamentosDokument12 SeitenAnálise de falhas em equipamentosMilton ManjateNoch keine Bewertungen
- Motor Shunt AtualizadoDokument13 SeitenMotor Shunt AtualizadoMilton ManjateNoch keine Bewertungen
- Sistema Digitais Relatorio 2.0Dokument8 SeitenSistema Digitais Relatorio 2.0Milton ManjateNoch keine Bewertungen
- Instalações Elétricas Prediais: Simbologia de ProjetosDokument77 SeitenInstalações Elétricas Prediais: Simbologia de ProjetosNuno HenriquesNoch keine Bewertungen
- LampadasDokument6 SeitenLampadasMilton ManjateNoch keine Bewertungen
- Psicologia e ReligiãoDokument7 SeitenPsicologia e ReligiãoFranciscoWalissonNoch keine Bewertungen
- Lubrificação de Eixos LinearesDokument2 SeitenLubrificação de Eixos LinearesiapglNoch keine Bewertungen
- Ficha de Segurança Fordor 750 WGDokument9 SeitenFicha de Segurança Fordor 750 WGMarcelo TavaresNoch keine Bewertungen
- Neutralizadores de vibraçõesDokument45 SeitenNeutralizadores de vibraçõesBernardo GuimarãesNoch keine Bewertungen
- Características e aplicação das estacas FrankiDokument7 SeitenCaracterísticas e aplicação das estacas Frankivalerio francaNoch keine Bewertungen
- Bruno de Almeida Simoes - 230530 - 192925Dokument7 SeitenBruno de Almeida Simoes - 230530 - 192925Red SunNoch keine Bewertungen
- Agro Foester Produtos Agricolas e Veterinários LTDA - PGRDokument25 SeitenAgro Foester Produtos Agricolas e Veterinários LTDA - PGRAmarildo paixaoNoch keine Bewertungen
- Folha Dízima 8º AnoDokument1 SeiteFolha Dízima 8º AnoFrancisco UlissesNoch keine Bewertungen
- A Importância Dos Lubrificantes Automóveis - ROCHA PNEUS - 1621833714923Dokument5 SeitenA Importância Dos Lubrificantes Automóveis - ROCHA PNEUS - 1621833714923JULIONoch keine Bewertungen
- Estudo Dirigido (A1) - Saneamento. GABARITODokument2 SeitenEstudo Dirigido (A1) - Saneamento. GABARITOandersonNoch keine Bewertungen
- FP Ed 279 261123 Digital InterativaDokument36 SeitenFP Ed 279 261123 Digital InterativaFabio Fidelis BilcheNoch keine Bewertungen
- FundamentosDokument2 SeitenFundamentosCleo CoelhoNoch keine Bewertungen
- Exercícios Sobre Conversão de Medidas de Ângulos - Brasil EscolaDokument3 SeitenExercícios Sobre Conversão de Medidas de Ângulos - Brasil Escolanilton alves da silvaNoch keine Bewertungen
- Apostila de Geometria Analítica (Professor)Dokument27 SeitenApostila de Geometria Analítica (Professor)Leonardo Tizatto WeinfurterNoch keine Bewertungen
- Projeto Aprendendo A ConviverDokument3 SeitenProjeto Aprendendo A ConviverdirleneNoch keine Bewertungen
- Vagão Forrageiro ManualDokument82 SeitenVagão Forrageiro ManualTORNEARIA LIPPERTNoch keine Bewertungen
- Teoria Da Personalidade e Do ComportamentoDokument37 SeitenTeoria Da Personalidade e Do ComportamentoElisângela de AlbuquerqueNoch keine Bewertungen
- Motovibradores IndustriaisDokument45 SeitenMotovibradores IndustriaisalanfbventuraNoch keine Bewertungen
- Caderno 1 - Eear Brasil - MatematicaDokument62 SeitenCaderno 1 - Eear Brasil - MatematicaRicciardo SilvaNoch keine Bewertungen
- A visão extraordinária de levar o Homem à LuaDokument4 SeitenA visão extraordinária de levar o Homem à LuaAna MartinsNoch keine Bewertungen
- Ficha 4283Dokument2 SeitenFicha 4283JORCY DE CARVALHO ALVES - SDNoch keine Bewertungen
- Bomba centrífuga: cálculos de altura, vazão e potênciaDokument2 SeitenBomba centrífuga: cálculos de altura, vazão e potênciaCaio ValérioNoch keine Bewertungen
- Ficha Técnica Conservação e RestauraçãoDokument7 SeitenFicha Técnica Conservação e RestauraçãoLiz RamírezNoch keine Bewertungen
- O Menino Selvagem e o processo de socializaçãoDokument3 SeitenO Menino Selvagem e o processo de socializaçãoJose Pereira(12LHCSE)Noch keine Bewertungen
- 580M RetroescavadeiraDokument6 Seiten580M RetroescavadeiraJerônimo RafaelNoch keine Bewertungen
- As 10 Formações Mais Bem Sucedidas de Saint SeiyaDokument6 SeitenAs 10 Formações Mais Bem Sucedidas de Saint SeiyaTreinar CapacitarNoch keine Bewertungen
- ATIVIDADE PhET SOBRE ELETRODINÂMICA - 2Dokument6 SeitenATIVIDADE PhET SOBRE ELETRODINÂMICA - 2Roberto VítorNoch keine Bewertungen
- Reiri 1Dokument69 SeitenReiri 1Rainbow. .dashlokaaNoch keine Bewertungen
- Oferta de conselhos e reflexões sobre a vidaDokument12 SeitenOferta de conselhos e reflexões sobre a vidaFatima4BretzNoch keine Bewertungen
- Activia: pesquisa de consumidores e construção de marcaDokument13 SeitenActivia: pesquisa de consumidores e construção de marcaJean Felipe CostaNoch keine Bewertungen