Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Kober MACH 2011Dokument34 SeitenKober MACH 2011Jose Lorenzo TrujilloNoch keine Bewertungen
- Multilayer Neuro Pid Controller Based On Back Propagation AlgorithmDokument8 SeitenMultilayer Neuro Pid Controller Based On Back Propagation AlgorithmJose Lorenzo TrujilloNoch keine Bewertungen
- Ex 6Dokument16 SeitenEx 6BirendraKiskuNoch keine Bewertungen
- Pole-Balancing With Different Evolved Neurocontrollers: August 2000Dokument8 SeitenPole-Balancing With Different Evolved Neurocontrollers: August 2000Jose Lorenzo TrujilloNoch keine Bewertungen
- Sky3ds User Guide en 2.02Dokument20 SeitenSky3ds User Guide en 2.02hadiNoch keine Bewertungen
- 236 1374 1 PBDokument10 Seiten236 1374 1 PBsubshadNoch keine Bewertungen
- Kober MACH 2011Dokument34 SeitenKober MACH 2011Jose Lorenzo TrujilloNoch keine Bewertungen
- PID Controller Design For Second Order Nonlinear Uncertain SystemsDokument13 SeitenPID Controller Design For Second Order Nonlinear Uncertain SystemsJose Lorenzo TrujilloNoch keine Bewertungen
- Comparison Between Multilayer Feedforward Neural Networks and A Radial Basis Function Network To Detect and Locate Leaks in Pipelines Transporting GasDokument6 SeitenComparison Between Multilayer Feedforward Neural Networks and A Radial Basis Function Network To Detect and Locate Leaks in Pipelines Transporting GasJose Lorenzo TrujilloNoch keine Bewertungen
- Midterm A1: Section 4Dokument3 SeitenMidterm A1: Section 4Jose Lorenzo TrujilloNoch keine Bewertungen
- Lab Notes: CE 33500, Computational Methods in Civil EngineeringDokument10 SeitenLab Notes: CE 33500, Computational Methods in Civil EngineeringJose Lorenzo TrujilloNoch keine Bewertungen
- State Space Repesentation TutorialDokument5 SeitenState Space Repesentation TutorialRajini MakamNoch keine Bewertungen
- Varghese 2017 IOP Conf. Ser. Mater. Sci. Eng. 263 052007Dokument16 SeitenVarghese 2017 IOP Conf. Ser. Mater. Sci. Eng. 263 052007Jose Lorenzo TrujilloNoch keine Bewertungen
- Evolution of Controllers From A High-LevDokument10 SeitenEvolution of Controllers From A High-LevJose Lorenzo TrujilloNoch keine Bewertungen
- Ijarece Vol 4 Issue 3 687 691Dokument6 SeitenIjarece Vol 4 Issue 3 687 691Jose Lorenzo TrujilloNoch keine Bewertungen
- An Optimal PID Control Algorithm For Training Feedforward Neural NetworksDokument11 SeitenAn Optimal PID Control Algorithm For Training Feedforward Neural NetworksJose Lorenzo TrujilloNoch keine Bewertungen
- Dyn ProgDokument48 SeitenDyn ProgJose Lorenzo TrujilloNoch keine Bewertungen
- Lec4 Gradient Method ReviseDokument33 SeitenLec4 Gradient Method ReviseJose Lorenzo TrujilloNoch keine Bewertungen
- Lec4 Gradient Method Revise LayersDokument67 SeitenLec4 Gradient Method Revise LayersJose Lorenzo TrujilloNoch keine Bewertungen
- Lec1 Math Pre ReviseDokument24 SeitenLec1 Math Pre ReviseJose Lorenzo TrujilloNoch keine Bewertungen
- 001 - Irjet-V4i10105 PDFDokument7 Seiten001 - Irjet-V4i10105 PDFJose Lorenzo TrujilloNoch keine Bewertungen
- Introduction To Matlab: Variable NamesDokument6 SeitenIntroduction To Matlab: Variable NamesJose Lorenzo TrujilloNoch keine Bewertungen
- Canonical FormsDokument31 SeitenCanonical FormsBrahadeesh Perinkolam MuraliNoch keine Bewertungen
- Comparison Between Multilayer Feedforward Neural Networks and A Radial Basis Function Network To Detect and Locate Leaks in Pipelines Transporting GasDokument6 SeitenComparison Between Multilayer Feedforward Neural Networks and A Radial Basis Function Network To Detect and Locate Leaks in Pipelines Transporting GasJose Lorenzo TrujilloNoch keine Bewertungen
- 1 s2.0 S1877705812046267 Main PDFDokument7 Seiten1 s2.0 S1877705812046267 Main PDFJose Lorenzo TrujilloNoch keine Bewertungen
- MIT6 241JS11 Cap07 PDFDokument14 SeitenMIT6 241JS11 Cap07 PDFJose Lorenzo TrujilloNoch keine Bewertungen
- cd2635 PDFDokument26 Seitencd2635 PDFkevin_leigh_1Noch keine Bewertungen
- Mex DLLDokument5 SeitenMex DLLJose Lorenzo TrujilloNoch keine Bewertungen
- Design of An Automatic Brake Control System Using ArtificialDokument7 SeitenDesign of An Automatic Brake Control System Using ArtificialJose Lorenzo TrujilloNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Stripper Bolt, Coil Spring, Dowel PinDokument3 SeitenStripper Bolt, Coil Spring, Dowel Pinmuhamad laaliNoch keine Bewertungen
- Individual Workweek Accomplishment ReportDokument16 SeitenIndividual Workweek Accomplishment ReportRenalyn Zamora Andadi JimenezNoch keine Bewertungen
- JKSSB Panchayat Secretary Adfar NabiDokument3 SeitenJKSSB Panchayat Secretary Adfar NabiSHEIKHXUNINoch keine Bewertungen
- World War I Almanac Almanacs of American WarsDokument561 SeitenWorld War I Almanac Almanacs of American WarsMatheus Benedito100% (1)
- Decretals Gregory IXDokument572 SeitenDecretals Gregory IXDesideriusBT100% (4)
- Chapter 6 - Scheduling AlgorithmDokument42 SeitenChapter 6 - Scheduling AlgorithmBinyam KebedeNoch keine Bewertungen
- Overpressure Prediction From PS Seismic DataDokument10 SeitenOverpressure Prediction From PS Seismic DataSevinj HumbatovaNoch keine Bewertungen
- Upload Emp Photo ConfigDokument14 SeitenUpload Emp Photo Configpaulantony143Noch keine Bewertungen
- 5568 AssignmentDokument12 Seiten5568 AssignmentAtif AliNoch keine Bewertungen
- Brent Berlin-Covert Categories and Folk TaxonomyDokument10 SeitenBrent Berlin-Covert Categories and Folk TaxonomyKawita ChuachengNoch keine Bewertungen
- Kuo SzuYu 2014 PHD ThesisDokument261 SeitenKuo SzuYu 2014 PHD ThesiskatandeNoch keine Bewertungen
- Marriage and Divorce Conflicts in The International PerspectiveDokument33 SeitenMarriage and Divorce Conflicts in The International PerspectiveAnjani kumarNoch keine Bewertungen
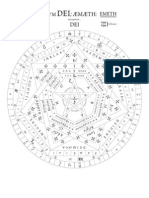
- John Dee - Sigillum Dei Aemeth or Seal of The Truth of God EnglishDokument2 SeitenJohn Dee - Sigillum Dei Aemeth or Seal of The Truth of God Englishsatyr70286% (7)
- An Aging Game Simulation Activity For Al PDFDokument13 SeitenAn Aging Game Simulation Activity For Al PDFramzan aliNoch keine Bewertungen
- Final DemoDokument14 SeitenFinal DemoangieNoch keine Bewertungen
- Abcs Booklet Kidney-Stones PDFDokument20 SeitenAbcs Booklet Kidney-Stones PDFDendhy Dwi Handana SagitaNoch keine Bewertungen
- IC HDL Lab ManualDokument82 SeitenIC HDL Lab ManualRakshitha AngelNoch keine Bewertungen
- Impulsive Buying PDFDokument146 SeitenImpulsive Buying PDFrukwavuNoch keine Bewertungen
- TSH TestDokument5 SeitenTSH TestdenalynNoch keine Bewertungen
- Creating The HardboiledDokument20 SeitenCreating The HardboiledBen NallNoch keine Bewertungen
- Second Unit Test 2022: Radha Madhav Public School BareillyDokument4 SeitenSecond Unit Test 2022: Radha Madhav Public School BareillyRaghav AgarwalNoch keine Bewertungen
- PHNCDokument6 SeitenPHNCAmit MangaonkarNoch keine Bewertungen
- Castigliano's 2nd TheoremDokument29 SeitenCastigliano's 2nd TheoremMiddle East100% (4)
- Mindfulness: Presented by Joshua Green, M.S. Doctoral Intern at Umaine Counseling CenterDokument12 SeitenMindfulness: Presented by Joshua Green, M.S. Doctoral Intern at Umaine Counseling CenterLawrence MbahNoch keine Bewertungen
- MRA Project Milestone 2Dokument20 SeitenMRA Project Milestone 2Sandya Vb69% (16)
- The 5 Basic Sentence PatternsDokument6 SeitenThe 5 Basic Sentence PatternsShuoNoch keine Bewertungen
- Working With Regular Expressions: Prof. Mary Grace G. VenturaDokument26 SeitenWorking With Regular Expressions: Prof. Mary Grace G. VenturaAngela BeatriceNoch keine Bewertungen
- DB2 UsefullcommandDokument8 SeitenDB2 Usefullcommandganeshreddy_dspxNoch keine Bewertungen
- Advisory Board ResearchDokument6 SeitenAdvisory Board Researcheaw12Noch keine Bewertungen
- Investment Opportunities: Equity MarketsDokument38 SeitenInvestment Opportunities: Equity MarketsRanjeet SinghNoch keine Bewertungen