Das könnte Ihnen auch gefallen
- Data Structure Question Paper With Answer PDFDokument6 SeitenData Structure Question Paper With Answer PDFMohammad Izhar Azad100% (4)
- CS8251 Programming in C-Question Bank With Answer KeysDokument40 SeitenCS8251 Programming in C-Question Bank With Answer KeysA Mary Aruldas80% (50)
- CP Viva Questions With AnswersDokument18 SeitenCP Viva Questions With AnswersPawanAgarwalNoch keine Bewertungen
- Coa Viva QuestionsDokument15 SeitenCoa Viva QuestionsSaif100% (1)
- Python Question Bank-BCCA SEM6Dokument7 SeitenPython Question Bank-BCCA SEM6Sara Rai50% (2)
- DS Important QuestionsDokument5 SeitenDS Important QuestionsBilal Shaikh100% (1)
- Explain Memory-Reference Instructions. Ans. Memory Reference InstructionsDokument23 SeitenExplain Memory-Reference Instructions. Ans. Memory Reference Instructionsshikha100% (1)
- CP Viva QuestionsDokument10 SeitenCP Viva Questionskvsrvzm0% (1)
- Viva Questions For Java LabDokument10 SeitenViva Questions For Java Labanshyaroy69% (16)
- R18 Os Lab Manual PDFDokument84 SeitenR18 Os Lab Manual PDFramya reddy71% (7)
- Viva Questions For Python LabDokument9 SeitenViva Questions For Python Labsweethaa harinishriNoch keine Bewertungen
- 300+ Top Web Technology Lab Viva Questions and Answers PDFDokument47 Seiten300+ Top Web Technology Lab Viva Questions and Answers PDFPANKAJ SAHONoch keine Bewertungen
- Data Structure Viva QuestionsDokument11 SeitenData Structure Viva QuestionsPREETAM SOW MONDAL67% (3)
- Important Questions in B.tech C - ProgramDokument9 SeitenImportant Questions in B.tech C - ProgramRangothri Sreenivasa Subramanyam75% (4)
- OOP Viva QuestionsDokument8 SeitenOOP Viva QuestionsRaza Khawar0% (1)
- Python Viva QuesionsDokument2 SeitenPython Viva QuesionsRaj Singh80% (5)
- C Viva QuestionsDokument9 SeitenC Viva QuestionsLakshmi Lakshminarayana100% (4)
- EC6301-OOPs and Data Structures-Anna University-Question PapersDokument10 SeitenEC6301-OOPs and Data Structures-Anna University-Question PapersbhuvangatesNoch keine Bewertungen
- C Sample Two Mark Question and Answer: 1) Who Invented C Language?Dokument13 SeitenC Sample Two Mark Question and Answer: 1) Who Invented C Language?rajapst90% (10)
- Data Structure Practical QuestionsDokument5 SeitenData Structure Practical QuestionsJayeeta nayak71% (7)
- DATABASE MANAGEMENT SYSTEMS Unit Wise Important Questions: PART - A (Short Answer Questions)Dokument7 SeitenDATABASE MANAGEMENT SYSTEMS Unit Wise Important Questions: PART - A (Short Answer Questions)Purushothama ReddyNoch keine Bewertungen
- Data Structures and Applications Questions From Old VTU Question PapersDokument4 SeitenData Structures and Applications Questions From Old VTU Question PapersAbubaker SiddiqueNoch keine Bewertungen
- Se Viva Practical Viva Questions For Software EngineeringDokument10 SeitenSe Viva Practical Viva Questions For Software EngineeringAbhijeet Malabade100% (2)
- DBMS Viva Questions MCA IdolDokument14 SeitenDBMS Viva Questions MCA IdolUnknown100% (9)
- OS Viva Expected QuestionsDokument7 SeitenOS Viva Expected Questionsaamer_shahbaazNoch keine Bewertungen
- Dbms Important QuestionsDokument15 SeitenDbms Important QuestionsSatish Kumar BhardwajNoch keine Bewertungen
- JAVA Important Questions (UNIT WISE)Dokument12 SeitenJAVA Important Questions (UNIT WISE)Subhash Chandra65% (17)
- OCS752 - 2 Mark Questions and AnswersDokument10 SeitenOCS752 - 2 Mark Questions and AnswersBALAKRISHNAN100% (7)
- CS6302 DBMS 2marksDokument33 SeitenCS6302 DBMS 2marksSathyamurthy Duraikkannu100% (2)
- Dbms Viva Voice Questions and AnswersDokument23 SeitenDbms Viva Voice Questions and Answersjyothibellaryv80% (5)
- DATA STRUCTURE Model Question PaperDokument5 SeitenDATA STRUCTURE Model Question Paperkokigokul80% (5)
- Unit 1 OoadDokument69 SeitenUnit 1 OoadSuraesh Krsihnaa50% (6)
- HTML Viva QuestionsDokument6 SeitenHTML Viva QuestionsSubha Sarah100% (2)
- Unit Wise Important QuestionsDokument11 SeitenUnit Wise Important Questionsvaishuramesh82% (11)
- C Viva QuestionsDokument4 SeitenC Viva QuestionsPREETAM SOW MONDAL100% (3)
- C and Data Structures Unit Wise Important QuestionsDokument15 SeitenC and Data Structures Unit Wise Important QuestionsToaster97100% (1)
- Data WareHouse Previous Year Question PaperDokument10 SeitenData WareHouse Previous Year Question PaperMadhusudan Das100% (1)
- Software Engineering 2 Mark Questions PDFDokument10 SeitenSoftware Engineering 2 Mark Questions PDFMunisekar67% (3)
- Data Structures Using Java - Lab ManualDokument48 SeitenData Structures Using Java - Lab Manualkishore kumar80% (5)
- C++ VIVA Question and Answers by Mcacareers - inDokument45 SeitenC++ VIVA Question and Answers by Mcacareers - inVishal Gupta100% (1)
- DBMS Lab Manual 2020 - 21 Student Copy UpdatedDokument59 SeitenDBMS Lab Manual 2020 - 21 Student Copy Updatedgautham100% (1)
- Dbms Important Questions For JNTU StudentsDokument3 SeitenDbms Important Questions For JNTU Studentssagar403050% (2)
- DBMS LESSON ALL Fill in The BlanksDokument1 SeiteDBMS LESSON ALL Fill in The BlanksANJAL Karki100% (1)
- Web Technology - Lecture Notes, Study Material and Important Questions, AnswersDokument5 SeitenWeb Technology - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVNoch keine Bewertungen
- Dsu MCQ PDFDokument16 SeitenDsu MCQ PDFChavhan SunilNoch keine Bewertungen
- CS8391-Data Structures-Anna University Question PapersDokument8 SeitenCS8391-Data Structures-Anna University Question Papersbhuvangates100% (2)
- PSPP-Unit-wise Important QuestionsDokument4 SeitenPSPP-Unit-wise Important Questionsjayanthikrishnan100% (3)
- MCQ C Language ChapterwiseDokument5 SeitenMCQ C Language Chapterwiseapi-267047853Noch keine Bewertungen
- CS8581 Networks Lab ManualDokument67 SeitenCS8581 Networks Lab ManualTamilvanan S100% (2)
- Ada Lab ManualDokument57 SeitenAda Lab ManualManohar NVNoch keine Bewertungen
- Ip Lab Viva QuestionsDokument6 SeitenIp Lab Viva Questionssivachandran235100% (1)
- DBMS - Transaction Management NotesDokument43 SeitenDBMS - Transaction Management NotesKomal Ramteke100% (1)
- DSD-Question BankDokument22 SeitenDSD-Question BankAngel LeoNoch keine Bewertungen
- Ec8393 - Fundamentals of Data Structures in C: Linear DatastructuresDokument11 SeitenEc8393 - Fundamentals of Data Structures in C: Linear DatastructuresRathiNoch keine Bewertungen
- Ec8393 QB 02 2 MarksDokument11 SeitenEc8393 QB 02 2 MarksBalaji GNNoch keine Bewertungen
- 191CSC303T - DS - Unit 1Dokument5 Seiten191CSC303T - DS - Unit 120-4082-Mohammad irfan SheikhNoch keine Bewertungen
- Bca C201 QB01Dokument21 SeitenBca C201 QB01Anjali PawarNoch keine Bewertungen
- 2MARKS (Data Structures Using Python)Dokument22 Seiten2MARKS (Data Structures Using Python)Lavanya JNoch keine Bewertungen
- Cs8391-Data StructureDokument21 SeitenCs8391-Data StructureAmudariaNoch keine Bewertungen
- Imp - Data-Structures QuestionsDokument16 SeitenImp - Data-Structures QuestionsBLACK xDEMONNoch keine Bewertungen
- Data Structures and ALGORITHMS Using Java: Course IntroductionDokument14 SeitenData Structures and ALGORITHMS Using Java: Course IntroductionLê Trần Đức ThịnhNoch keine Bewertungen
- Ds 5-StacksDokument26 SeitenDs 5-StacksayushiNoch keine Bewertungen
- Data Structure CourseDokument48 SeitenData Structure CourseSiena Duerme GutierrezNoch keine Bewertungen
- Homework 5: Ij Ij I IjDokument2 SeitenHomework 5: Ij Ij I IjMorley Calo Mahinay Jr.Noch keine Bewertungen
- ArrayList in JavaDokument3 SeitenArrayList in JavaMongieNoch keine Bewertungen
- Module 3 AE4 Linear Programming The Simplex MethodDokument73 SeitenModule 3 AE4 Linear Programming The Simplex MethodEleyna AlcatrazNoch keine Bewertungen
- Optimization Models HUSTDokument24 SeitenOptimization Models HUSTLan - GV trường TH Trác Văn Nguyễn Thị NgọcNoch keine Bewertungen
- Presentacion Capitulo 8 (Abstraciones de Datos)Dokument25 SeitenPresentacion Capitulo 8 (Abstraciones de Datos)chapuzas22Noch keine Bewertungen
- Lecture 8: Gradient Descent and Logistic RegressionDokument39 SeitenLecture 8: Gradient Descent and Logistic RegressionAshish JainNoch keine Bewertungen
- Bresenham Line Drawing Algorithm,: Course WebsiteDokument47 SeitenBresenham Line Drawing Algorithm,: Course Websitejontyrhodes1012237Noch keine Bewertungen
- D) All of The Above A) AVL TreeDokument26 SeitenD) All of The Above A) AVL TreeAbhi BNoch keine Bewertungen
- Dynamic Programming and Optimal Control: Programming Exercise Topic: Infinite Horizon ProblemsDokument5 SeitenDynamic Programming and Optimal Control: Programming Exercise Topic: Infinite Horizon ProblemsOzzy JonesNoch keine Bewertungen
- Computer Based Optimization Method MCA - 305Dokument3 SeitenComputer Based Optimization Method MCA - 305Mangesh Malvankar100% (1)
- Tutorial 2Dokument7 SeitenTutorial 2朱宸烨Noch keine Bewertungen
- Big L2E Algorithms (Last Two Edges) : CuberootDokument1 SeiteBig L2E Algorithms (Last Two Edges) : CuberootpranjalNoch keine Bewertungen
- CS 332: Algorithms: Introduction To HeapsortDokument35 SeitenCS 332: Algorithms: Introduction To HeapsortAnonymous niE5VQOHNoch keine Bewertungen
- Jacobi & Seidel MethodDokument4 SeitenJacobi & Seidel MethodRidwan AlfianNoch keine Bewertungen
- Fibonacci Search TechniqueDokument3 SeitenFibonacci Search TechniquelakshmirevelNoch keine Bewertungen
- Algorithms For Two-Dimensional Bin Packing and Assignment Problems - LodiDokument208 SeitenAlgorithms For Two-Dimensional Bin Packing and Assignment Problems - LoditrivilintarolasNoch keine Bewertungen
- Bubble Sort Cocktail Sort: A Group Project On Fundamentals of Computing 1Dokument13 SeitenBubble Sort Cocktail Sort: A Group Project On Fundamentals of Computing 1Mariebeth SenoNoch keine Bewertungen
- Hough Examples - AlgorithmDokument8 SeitenHough Examples - Algorithmashenafiay2015Noch keine Bewertungen
- Fast Fourier Transform (FFT)Dokument25 SeitenFast Fourier Transform (FFT)Jagdeep RahulNoch keine Bewertungen
- Data Structure Practice QuestionsDokument2 SeitenData Structure Practice QuestionsPapori BorgohainNoch keine Bewertungen
- Tugas Mater Chapter 6&10Dokument37 SeitenTugas Mater Chapter 6&10Inda AnnisaNoch keine Bewertungen
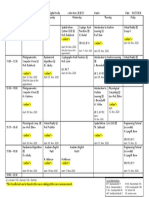
- WochenstundenplΣne CS4DM WS20-21 Stand 27Okt20Dokument1 SeiteWochenstundenplΣne CS4DM WS20-21 Stand 27Okt20Anas AsifNoch keine Bewertungen
- Linear Programming Simplex MethodDokument14 SeitenLinear Programming Simplex MethodElinie Chelsea PacanaNoch keine Bewertungen
- Gauss Elimination MethodDokument23 SeitenGauss Elimination MethodJoeren JarinNoch keine Bewertungen
- GraphsDokument1.805 SeitenGraphsDinesh Reddy KommeraNoch keine Bewertungen
- 1 To 10 DSA 22dce099Dokument59 Seiten1 To 10 DSA 22dce09922dce099Noch keine Bewertungen
- Scheduling 7 and SequencingDokument25 SeitenScheduling 7 and SequencingBharadhwaj BalasubramaniamNoch keine Bewertungen