Das könnte Ihnen auch gefallen
- Pateldkp 1Dokument248 SeitenPateldkp 1FerNoch keine Bewertungen
- Bayesian Networks: A Practical Guide to ApplicationsVon EverandBayesian Networks: A Practical Guide to ApplicationsOlivier PourretBewertung: 2.5 von 5 Sternen2.5/5 (2)
- VCEH B Tech Project ReportDokument66 SeitenVCEH B Tech Project Reportmr copy xeroxNoch keine Bewertungen
- University of Calgary: New Measurement-While-Drilling Surveying Technique Utilizing Sets of Fiber Optic Rotation SensorsDokument289 SeitenUniversity of Calgary: New Measurement-While-Drilling Surveying Technique Utilizing Sets of Fiber Optic Rotation SensorsJames ConnerNoch keine Bewertungen
- Akon Thesis PDFDokument116 SeitenAkon Thesis PDFKant SantosNoch keine Bewertungen
- Precision Passive Alignment of WafersDokument102 SeitenPrecision Passive Alignment of WafersIvan AvramovNoch keine Bewertungen
- G8 Report MajorDokument64 SeitenG8 Report Majormr copy xeroxNoch keine Bewertungen
- Development of 3D Printed Spectroscopy InstrumentationDokument80 SeitenDevelopment of 3D Printed Spectroscopy InstrumentationGerman GodinezNoch keine Bewertungen
- Final Defense Report-4Dokument29 SeitenFinal Defense Report-4Angel DahalNoch keine Bewertungen
- Tesi Riccardo LastricoDokument123 SeitenTesi Riccardo LastricoomarNoch keine Bewertungen
- Surface Mining Machines Problems of Maintenance and ModernizationDokument179 SeitenSurface Mining Machines Problems of Maintenance and Modernizationnurkovic_ele100% (1)
- Vishnu Aishwaryan Subra Mani Final Draft ThesisDokument100 SeitenVishnu Aishwaryan Subra Mani Final Draft ThesisScaricatore92Noch keine Bewertungen
- Automatic Detection and Staging of Diabetic Retinopathy Using Deep Learning TechniquesDokument40 SeitenAutomatic Detection and Staging of Diabetic Retinopathy Using Deep Learning Techniquesakshatguptaec20.rvitmNoch keine Bewertungen
- EdinGolubovic 411755Dokument101 SeitenEdinGolubovic 411755Chandan KumarNoch keine Bewertungen
- RoboticsDokument96 SeitenRoboticsmsmajediNoch keine Bewertungen
- Face Recognition System With Face DetectionDokument62 SeitenFace Recognition System With Face Detection20at1a3145Noch keine Bewertungen
- ANN ThesisDokument163 SeitenANN ThesisSonal PanwarNoch keine Bewertungen
- Seminar Report Gokul Sunu M-1Dokument38 SeitenSeminar Report Gokul Sunu M-1dinganshashiNoch keine Bewertungen
- Model-Based Design For Visual Localization Via Stereoscopic Video ProcessingDokument41 SeitenModel-Based Design For Visual Localization Via Stereoscopic Video ProcessingDan KaputaNoch keine Bewertungen
- Sree Vidyanikethan Engineering College: CertificateDokument8 SeitenSree Vidyanikethan Engineering College: CertificateSubbu SuniNoch keine Bewertungen
- Thse Genetic Algo IntrressanteDokument75 SeitenThse Genetic Algo Intrressanteriad bouaitaNoch keine Bewertungen
- 19mic0054 VL2022230502792 Pe004Dokument50 Seiten19mic0054 VL2022230502792 Pe004Prashanth BalajiNoch keine Bewertungen
- Parkinson'S Brain Disease Prediction Using Descriptive AnalysisDokument8 SeitenParkinson'S Brain Disease Prediction Using Descriptive AnalysisThyagàrajênNoch keine Bewertungen
- Report On Brain Tumor - Docx1Dokument35 SeitenReport On Brain Tumor - Docx1Monika DebnathNoch keine Bewertungen
- Design and Analysis of An Oscillating Mechanism For Applications in A Bone SawDokument126 SeitenDesign and Analysis of An Oscillating Mechanism For Applications in A Bone SawRockerss RockerssNoch keine Bewertungen
- Asarudheen Final ThesisDokument62 SeitenAsarudheen Final ThesisMohamed Asarudheen sNoch keine Bewertungen
- Thesis - Modelling of Spur Gear Meshing Characteristics Under Various Crack SizeDokument54 SeitenThesis - Modelling of Spur Gear Meshing Characteristics Under Various Crack SizeKevin NguyenNoch keine Bewertungen
- NR 43308Dokument188 SeitenNR 43308Venkat Kiran SribhashyamNoch keine Bewertungen
- Strength and Vibration Analysis of Anti Friction Bearing DefectsDokument126 SeitenStrength and Vibration Analysis of Anti Friction Bearing DefectsJaaiBadgujarNoch keine Bewertungen
- Group 7 Project Report 1st IterationDokument49 SeitenGroup 7 Project Report 1st IterationReviewer MapsNoch keine Bewertungen
- Optical MouseDokument104 SeitenOptical Mousejuan gutierresNoch keine Bewertungen
- New Jersey Institute of Technology Reserves The Right To Distribute This Thesis or DissertationDokument60 SeitenNew Jersey Institute of Technology Reserves The Right To Distribute This Thesis or DissertationSRI KRISHNA RNoch keine Bewertungen
- Road Asset Management: Evolution and TechniquesDokument40 SeitenRoad Asset Management: Evolution and TechniquesAnonymous iMq2HDvVqNoch keine Bewertungen
- Maninder Singh 801761010 FinalDokument64 SeitenManinder Singh 801761010 FinalNilam ThakkarNoch keine Bewertungen
- MS - Thesis JOURNAL BEARINGDokument112 SeitenMS - Thesis JOURNAL BEARINGZahir KhiraNoch keine Bewertungen
- Defects Inspection Process of Flat Panel Display Fabrication Through Neural NetworksDokument134 SeitenDefects Inspection Process of Flat Panel Display Fabrication Through Neural NetworksAnonymous 1kEh0GvTgiNoch keine Bewertungen
- Eth 5479 02Dokument191 SeitenEth 5479 02zikamnerNoch keine Bewertungen
- Signal Processing of FMCW Synthetic Aperture Radar DataDokument133 SeitenSignal Processing of FMCW Synthetic Aperture Radar DataHưng Nguyễn ĐìnhNoch keine Bewertungen
- Project ReportDokument49 SeitenProject Reportmanisha arsuleNoch keine Bewertungen
- FULLTEXT02Dokument101 SeitenFULLTEXT02Babuli KumarNoch keine Bewertungen
- Internship Report 6th Sem BE/B.TECH at NitkDokument69 SeitenInternship Report 6th Sem BE/B.TECH at Nitkbinay kumar singhNoch keine Bewertungen
- Ms Thesis Swapneel Final PDFDokument104 SeitenMs Thesis Swapneel Final PDFnagabhairu anushaNoch keine Bewertungen
- IndexDokument123 SeitenIndexricardoNoch keine Bewertungen
- Flight Control and Hardware Design of Multi-Rotor SystemsDokument24 SeitenFlight Control and Hardware Design of Multi-Rotor Systems029Muhammad Robith Fikris SholihNoch keine Bewertungen
- Dyuthi T0710Dokument174 SeitenDyuthi T0710Isolated RahulNoch keine Bewertungen
- Mit PDFDokument45 SeitenMit PDFDaniloImbachiNoch keine Bewertungen
- Thesis MelsonDokument160 SeitenThesis MelsonVincent CucumazzøNoch keine Bewertungen
- Major Project ReportDokument46 SeitenMajor Project ReportJayaN TNoch keine Bewertungen
- Mousa ThesisDokument131 SeitenMousa ThesisJoanna GhaddarNoch keine Bewertungen
- Benstock D 2016 PHD ThesisDokument181 SeitenBenstock D 2016 PHD ThesisVitor Soares AntunesNoch keine Bewertungen
- Sinemn ProDokument54 SeitenSinemn ProSwathi RaniNoch keine Bewertungen
- Selection of Optimum Parameters For EcmDokument63 SeitenSelection of Optimum Parameters For Ecmramkumar121Noch keine Bewertungen
- Attitude Estimation With IMUs usingMachineLearningDokument72 SeitenAttitude Estimation With IMUs usingMachineLearningzaidNoch keine Bewertungen
- Sudipan Saha Mtech Ultrasound CADDokument62 SeitenSudipan Saha Mtech Ultrasound CADArga HantaraNoch keine Bewertungen
- Report Finalev7Dokument65 SeitenReport Finalev7Hitesh N PNoch keine Bewertungen
- Ku Dissertation 2019Dokument154 SeitenKu Dissertation 2019catgadhaNoch keine Bewertungen
- Srujana DocumenatationDokument69 SeitenSrujana DocumenatationCharitha IddumNoch keine Bewertungen
- Paper On Waler BeamDokument0 SeitenPaper On Waler Beamharicv019Noch keine Bewertungen
- Muhammad Akif Naeem Open Ended Lab Signals and SystemDokument20 SeitenMuhammad Akif Naeem Open Ended Lab Signals and SystemMuhammad Akif NaeemNoch keine Bewertungen
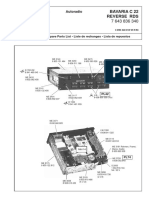
- Bavaria Reverse RdsDokument15 SeitenBavaria Reverse RdsDušan JovanovićNoch keine Bewertungen
- Soccer Field Lighting DesignDokument22 SeitenSoccer Field Lighting DesigndevakaNoch keine Bewertungen
- SavcaEugeniu (CV) byDokument4 SeitenSavcaEugeniu (CV) bySavcaNoch keine Bewertungen
- Infopack 2016 enDokument44 SeitenInfopack 2016 enAlbertoNoch keine Bewertungen
- Batteries and Primitive Survival Ebook 2008+ PDFDokument333 SeitenBatteries and Primitive Survival Ebook 2008+ PDFOceanNoch keine Bewertungen
- Croatia: Approved Port Facilities in CroatiaDokument1 SeiteCroatia: Approved Port Facilities in CroatiaАлександрNoch keine Bewertungen
- 2032-10 - E Gazette SLDokument3 Seiten2032-10 - E Gazette SLhimaliNoch keine Bewertungen
- Gestrast 6Dokument3 SeitenGestrast 6iran1362Noch keine Bewertungen
- Annex12 Technical Cards For Accessible ConstructionDokument44 SeitenAnnex12 Technical Cards For Accessible Constructionarchitectfemil6663Noch keine Bewertungen
- ViO80 1A PDFDokument2 SeitenViO80 1A PDFTomislav1998Noch keine Bewertungen
- M2.2.9 Critical Review and Selection of NDT MethodsDokument13 SeitenM2.2.9 Critical Review and Selection of NDT MethodsAldy Bagus PratamaNoch keine Bewertungen
- Eee25 2018syllabusDokument4 SeitenEee25 2018syllabusEmman Joshua BustoNoch keine Bewertungen
- CFPA E Guideline No 19 2009 EVACUATION FROM BUILDINGS PDFDokument99 SeitenCFPA E Guideline No 19 2009 EVACUATION FROM BUILDINGS PDFodemircioglu2Noch keine Bewertungen
- Pedestrian Design Guidelines PDFDokument50 SeitenPedestrian Design Guidelines PDFIvan AndradeNoch keine Bewertungen
- California Bearing Ratio, Evaluation and Estimation: A Study On ComparisonsDokument4 SeitenCalifornia Bearing Ratio, Evaluation and Estimation: A Study On ComparisonsAmyra MiaNoch keine Bewertungen
- Apollo Experience Report Electronic Systems Test Program Accomplishments and ResultsDokument70 SeitenApollo Experience Report Electronic Systems Test Program Accomplishments and ResultsBob AndrepontNoch keine Bewertungen
- Catalogo EpirocDokument7 SeitenCatalogo EpirocAngel García0% (1)
- BS en 50483 6 2009Dokument27 SeitenBS en 50483 6 2009Shara LogisticNoch keine Bewertungen
- Led Linear Emergency 2021Dokument4 SeitenLed Linear Emergency 2021Sugumaran LakshmananNoch keine Bewertungen
- Data SheetDokument5 SeitenData Sheetsongtu2552Noch keine Bewertungen
- Nust Entrance TestDokument16 SeitenNust Entrance TestShawn Parker80% (30)
- Dynamic Arrays With The Arraylist Class Chapter Xii TopicsDokument38 SeitenDynamic Arrays With The Arraylist Class Chapter Xii TopicsRocket FireNoch keine Bewertungen
- NEOCLASSICAL CITY PlanningDokument10 SeitenNEOCLASSICAL CITY PlanningAfrahNoch keine Bewertungen
- Odi2-065r16m18s02-Q DS 0-0-0Dokument3 SeitenOdi2-065r16m18s02-Q DS 0-0-0leolima trustitNoch keine Bewertungen
- Centrifugal PumpDokument56 SeitenCentrifugal Pumpchandraa2208Noch keine Bewertungen
- Vector VII 104-561kVA User Manual 6.6.1Dokument165 SeitenVector VII 104-561kVA User Manual 6.6.1juliocanel2009100% (3)
- Astm D3212.380331 1Dokument3 SeitenAstm D3212.380331 1anish_am2005Noch keine Bewertungen
- SG-05 Safety Guideline For Illumination at WorkplaceDokument5 SeitenSG-05 Safety Guideline For Illumination at WorkplacebsrchandruNoch keine Bewertungen
- CH 19Dokument147 SeitenCH 19Kathy YellaNoch keine Bewertungen
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityVon EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityBewertung: 5 von 5 Sternen5/5 (1)
- Generative AI: The Insights You Need from Harvard Business ReviewVon EverandGenerative AI: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Algorithms to Live By: The Computer Science of Human DecisionsVon EverandAlgorithms to Live By: The Computer Science of Human DecisionsBewertung: 4.5 von 5 Sternen4.5/5 (722)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyVon EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyBewertung: 3.5 von 5 Sternen3.5/5 (111)
- Cyber War: The Next Threat to National Security and What to Do About ItVon EverandCyber War: The Next Threat to National Security and What to Do About ItBewertung: 3.5 von 5 Sternen3.5/5 (66)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveVon EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNoch keine Bewertungen
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldVon EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (55)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessVon EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNoch keine Bewertungen
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideVon EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideBewertung: 5 von 5 Sternen5/5 (2)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceVon EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNoch keine Bewertungen
- Solutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesVon EverandSolutions Architect's Handbook: Kick-start your career as a solutions architect by learning architecture design principles and strategiesNoch keine Bewertungen
- Chip War: The Quest to Dominate the World's Most Critical TechnologyVon EverandChip War: The Quest to Dominate the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (227)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldVon EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (107)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziVon Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNoch keine Bewertungen
- Dark Data: Why What You Don’t Know MattersVon EverandDark Data: Why What You Don’t Know MattersBewertung: 4.5 von 5 Sternen4.5/5 (3)
- How to Do Nothing: Resisting the Attention EconomyVon EverandHow to Do Nothing: Resisting the Attention EconomyBewertung: 4 von 5 Sternen4/5 (421)
- The Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectVon EverandThe Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectBewertung: 4.5 von 5 Sternen4.5/5 (20)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewVon EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (104)
- AI Prompting Mastery: Strategies and Techniques for Effective PromptingVon EverandAI Prompting Mastery: Strategies and Techniques for Effective PromptingNoch keine Bewertungen
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Von EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Bewertung: 4 von 5 Sternen4/5 (1)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Von EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Bewertung: 5 von 5 Sternen5/5 (34)