Das könnte Ihnen auch gefallen
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Von EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Noch keine Bewertungen
- Equivalent Force Systems: This Module Aims That The Students Will Be Able ToDokument11 SeitenEquivalent Force Systems: This Module Aims That The Students Will Be Able ToMONIQUE UNICO100% (1)
- Assignment 1Dokument5 SeitenAssignment 1candychongNoch keine Bewertungen
- Newton's Law of CoolingDokument2 SeitenNewton's Law of CoolingChristian Elim SoliganNoch keine Bewertungen
- Mechanics Formula SheetDokument2 SeitenMechanics Formula SheetDax1647100% (2)
- Physics 1Dokument71 SeitenPhysics 1Dexie Jay Aljas100% (1)
- MODULE TITLE: Exact Differential Equations Learning ObjectivesDokument5 SeitenMODULE TITLE: Exact Differential Equations Learning ObjectiveskjNoch keine Bewertungen
- 4 Second Order Linear ODEs 1Dokument64 Seiten4 Second Order Linear ODEs 1Lanz CaballaNoch keine Bewertungen
- DynamicsDokument15 SeitenDynamicstomtom9649100% (4)
- Product Rule:: Uv Udv VduDokument35 SeitenProduct Rule:: Uv Udv Vduمحمد شهريل محمد نورNoch keine Bewertungen
- Exercise 2.5 - BerongoyDokument2 SeitenExercise 2.5 - Berongoydominic compio100% (2)
- CN Chap10 - Moments of InertiaDokument25 SeitenCN Chap10 - Moments of Inertiaengineer_atulNoch keine Bewertungen
- Integration by Substitution: SolutionDokument3 SeitenIntegration by Substitution: SolutionVape DrugNoch keine Bewertungen
- Chapter 103 Even and Odd Functions and Half-Range Fourier SeriesDokument12 SeitenChapter 103 Even and Odd Functions and Half-Range Fourier SeriesBaibhav MohantyNoch keine Bewertungen
- Problems Differential EquationsDokument121 SeitenProblems Differential EquationsRazes50% (4)
- Physic Calculation SheetDokument2 SeitenPhysic Calculation Sheetsharon100% (2)
- Proof of Properties of Gradient, Divergence and CurlDokument4 SeitenProof of Properties of Gradient, Divergence and Curlfelix Kathae0% (1)
- Powers and Roots of Complex Numbers - DeMoivre's TheoremDokument6 SeitenPowers and Roots of Complex Numbers - DeMoivre's Theoremxhaikh21Noch keine Bewertungen
- Mof-Chapter-2 - 20 PDFDokument45 SeitenMof-Chapter-2 - 20 PDFMOHAMMED NOUMAN A Dept of Civil EngineeringNoch keine Bewertungen
- Equation SheetDokument2 SeitenEquation Sheettw2121100% (1)
- Dynamics Formula Sheet For ClassesDokument3 SeitenDynamics Formula Sheet For Classesxzhutchx60% (5)
- Chapter 5 - Equilibrium of Rigid Bodies: ObjectivesDokument9 SeitenChapter 5 - Equilibrium of Rigid Bodies: ObjectivesRhey LuceroNoch keine Bewertungen
- D.E 4th EditionDokument30 SeitenD.E 4th EditionJohn Vince Recla0% (1)
- Chapter 3 Work and Energy MethodDokument23 SeitenChapter 3 Work and Energy Methoddudescape100% (1)
- Untitled PDFDokument87 SeitenUntitled PDFasadNoch keine Bewertungen
- L5 Discussion - Non-Exact Differential Equations PDFDokument5 SeitenL5 Discussion - Non-Exact Differential Equations PDFCarlo EdolmoNoch keine Bewertungen
- Inverce Laplace Transform ExamplesDokument9 SeitenInverce Laplace Transform ExamplesBaran DemirNoch keine Bewertungen
- Exercise 5 Non - Exact EquationsDokument1 SeiteExercise 5 Non - Exact EquationsAnaFarisDanialNoch keine Bewertungen
- 15.1 Separable EquationsDokument3 Seiten15.1 Separable EquationsHin Wa LeungNoch keine Bewertungen
- Friction Practice Problems SolutionsDokument3 SeitenFriction Practice Problems SolutionsJendae100% (1)
- 5.1 Feltap Processes of Ideal GasDokument99 Seiten5.1 Feltap Processes of Ideal GaskangkongNoch keine Bewertungen
- Math 6 Differential Equations Engr. Dave PojadasDokument83 SeitenMath 6 Differential Equations Engr. Dave PojadasCuca Lordwin Y SobiorNoch keine Bewertungen
- 15 - Practice Exercise 2.1 - AnswerDokument2 Seiten15 - Practice Exercise 2.1 - AnswerCARL WENDELL BAYOCOTNoch keine Bewertungen
- Integration TechniqueDokument125 SeitenIntegration TechniqueShafi NibrajNoch keine Bewertungen
- Kinetics of Rigid BodyDokument32 SeitenKinetics of Rigid BodyAdrian AbdillaNoch keine Bewertungen
- Principles of StaticsDokument7 SeitenPrinciples of StaticsJommarVocalTagalogNoch keine Bewertungen
- Hooke's Law Lab ReportDokument5 SeitenHooke's Law Lab ReportÖzgür Sarımaden100% (1)
- Ch1 - Laplace Transform L.T. - 26 Pgs PDFDokument26 SeitenCh1 - Laplace Transform L.T. - 26 Pgs PDFMohamad Duhoki100% (1)
- Unit IIDokument50 SeitenUnit IIapi-352822682100% (1)
- Chap 13 SolutionDokument42 SeitenChap 13 SolutionEdem Koffi Missihoun100% (3)
- Integral Calculus Finals ReviewerDokument12 SeitenIntegral Calculus Finals ReviewerIchiroue Whan GNoch keine Bewertungen
- Differential Equation - Examples of Exact EquationsDokument4 SeitenDifferential Equation - Examples of Exact EquationsAimi Najwa Zailan100% (1)
- 6 - Linear Differential Equations of Order N PDFDokument19 Seiten6 - Linear Differential Equations of Order N PDFRuel Japhet BitoyNoch keine Bewertungen
- Practice SolutionsDokument31 SeitenPractice SolutionsStevenNoch keine Bewertungen
- Simple Stresses From MathalinoDokument58 SeitenSimple Stresses From MathalinoGien Lim100% (5)
- Families of Curves: DiscussionDokument13 SeitenFamilies of Curves: DiscussionJohn Glenn Lausin MaticNoch keine Bewertungen
- Ideal Gas ProcessDokument1 SeiteIdeal Gas ProcessGood Game100% (1)
- Chapter VI - Force System in SpaceDokument11 SeitenChapter VI - Force System in SpaceJommarVocalTagalogNoch keine Bewertungen
- Laplace Transforms (Exercises)Dokument10 SeitenLaplace Transforms (Exercises)Karumon UtsumiNoch keine Bewertungen
- Applications of Ordinary Differential EquationsDokument13 SeitenApplications of Ordinary Differential EquationsMJ BeatzNoch keine Bewertungen
- A V P A V P: PressureDokument2 SeitenA V P A V P: PressurePearl Alexandra FabitoNoch keine Bewertungen
- Equations Reducible To Variables SeparableDokument4 SeitenEquations Reducible To Variables SeparablebenrasheedNoch keine Bewertungen
- Elements of Electromagnetics Third Edition E Book Chapter 02Dokument25 SeitenElements of Electromagnetics Third Edition E Book Chapter 02Yepuru ChaithanyaNoch keine Bewertungen
- Voltage Divider ExperimentDokument14 SeitenVoltage Divider ExperimentDave Vic Solis100% (2)
- Kirchoffs Law With Cramers RuleDokument14 SeitenKirchoffs Law With Cramers RuleRoy BernardNoch keine Bewertungen
- Newton's Law of CoolingDokument27 SeitenNewton's Law of CoolingFrances GalangNoch keine Bewertungen
- FrictionDokument15 SeitenFrictionMhai MabantaNoch keine Bewertungen
- Physics 1 Formula SheetDokument2 SeitenPhysics 1 Formula SheetMichaelNoch keine Bewertungen
- Fuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andDokument1 SeiteFuente: Malmivuo, Jaakko Plonsey, Robert Bioelectromagnetism, Principles and Applications of Bioelectric andJuan David CastañoNoch keine Bewertungen
- Physics 1301 Equation SheetDokument2 SeitenPhysics 1301 Equation Sheeth.krijestoracNoch keine Bewertungen
- Sla At&tDokument2 SeitenSla At&tCésar Lainez Lozada TorattoNoch keine Bewertungen
- 220245-MSBTE-22412-Java (Unit 1)Dokument40 Seiten220245-MSBTE-22412-Java (Unit 1)Nomaan ShaikhNoch keine Bewertungen
- Subject OrientationDokument15 SeitenSubject OrientationPearl OgayonNoch keine Bewertungen
- Fuzzy Gain Scheduled Pi Controller For ADokument5 SeitenFuzzy Gain Scheduled Pi Controller For AOumayNoch keine Bewertungen
- Data MiningDokument28 SeitenData MiningGURUPADA PATINoch keine Bewertungen
- Introduction CompilerDokument47 SeitenIntroduction CompilerHarshit SinghNoch keine Bewertungen
- Alfa Week 1Dokument13 SeitenAlfa Week 1Cikgu kannaNoch keine Bewertungen
- Niveshdaily: From Research DeskDokument53 SeitenNiveshdaily: From Research DeskADNoch keine Bewertungen
- 2Dokument8 Seiten2Eduardo Antonio Comaru Gouveia75% (4)
- Common Core Content and Training Objectives For Basic AIS Training - Phase 2 - SpecialistDokument82 SeitenCommon Core Content and Training Objectives For Basic AIS Training - Phase 2 - SpecialistjlferreiraNoch keine Bewertungen
- Application of The Strain Energy To Estimate The Rock Load in Non-Squeezing Ground ConditionDokument17 SeitenApplication of The Strain Energy To Estimate The Rock Load in Non-Squeezing Ground ConditionAmit Kumar GautamNoch keine Bewertungen
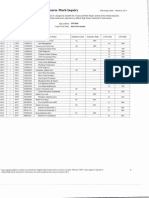
- W.C. Hicks Appliances: Client Name SKU Item Name Delivery Price Total DueDokument2 SeitenW.C. Hicks Appliances: Client Name SKU Item Name Delivery Price Total DueParth PatelNoch keine Bewertungen
- Reference Paper Literature ReviewDokument5 SeitenReference Paper Literature ReviewAani RashNoch keine Bewertungen
- Safety Bulletin 09 - Emergency Escape Breathing Device - Product RecallDokument2 SeitenSafety Bulletin 09 - Emergency Escape Breathing Device - Product RecallMuhammadNoch keine Bewertungen
- Virtual WorkDokument12 SeitenVirtual Workdkgupta28Noch keine Bewertungen
- The Turning Circle of VehiclesDokument2 SeitenThe Turning Circle of Vehiclesanon_170098985Noch keine Bewertungen
- 11.3.1 Some Special CasesDokument10 Seiten11.3.1 Some Special CasesSiddharth KishanNoch keine Bewertungen
- The Linguistic Colonialism of EnglishDokument4 SeitenThe Linguistic Colonialism of EnglishAdriana MirandaNoch keine Bewertungen
- Img 20150510 0001Dokument2 SeitenImg 20150510 0001api-284663984Noch keine Bewertungen
- AISOY1 KiK User ManualDokument28 SeitenAISOY1 KiK User ManualLums TalyerNoch keine Bewertungen
- MFE Module 1 .Dokument15 SeitenMFE Module 1 .Adarsh KNoch keine Bewertungen
- BBL PR Centralizer Rig Crew Handout (R1.1 2-20-19)Dokument2 SeitenBBL PR Centralizer Rig Crew Handout (R1.1 2-20-19)NinaNoch keine Bewertungen
- Wealth and Poverty in The Book of Proverbs PDFDokument133 SeitenWealth and Poverty in The Book of Proverbs PDFMaahes Cultural Library100% (1)
- Coaxial Cable Attenuation ChartDokument6 SeitenCoaxial Cable Attenuation ChartNam PhamNoch keine Bewertungen
- The New Order of BarbariansDokument39 SeitenThe New Order of Barbariansbadguy100% (1)
- Lesson 1 3 Transes in Reading in Philippine HistoryDokument17 SeitenLesson 1 3 Transes in Reading in Philippine HistoryNAPHTALI WILLIAMS GONoch keine Bewertungen
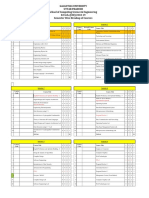
- Galgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesDokument2 SeitenGalgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesRohit Singh BhatiNoch keine Bewertungen
- Hanwha Q Cells Data Sheet Qpeak L-g4.2 360-370 2017-10 Rev02 NaDokument2 SeitenHanwha Q Cells Data Sheet Qpeak L-g4.2 360-370 2017-10 Rev02 NazulfikarNoch keine Bewertungen
- Biotech NewsDokument116 SeitenBiotech NewsRahul KapoorNoch keine Bewertungen
- Grade 3 - Unit 1 Increase and Decrease PatternDokument7 SeitenGrade 3 - Unit 1 Increase and Decrease PatternKyo ToeyNoch keine Bewertungen