Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Solution Manual For Discrete Mathematics 7th Edition by JohnsonbaughDokument14 SeitenSolution Manual For Discrete Mathematics 7th Edition by Johnsonbaugha19397263967% (3)
- PVR Model - Data FileDokument17 SeitenPVR Model - Data FileashviniNoch keine Bewertungen
- Valuation ProblemsDokument2 SeitenValuation ProblemsashviniNoch keine Bewertungen
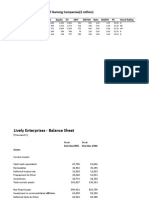
- Lively EnterprisesDokument5 SeitenLively EnterprisesashviniNoch keine Bewertungen
- PVR Model - Data FileDokument17 SeitenPVR Model - Data FileashviniNoch keine Bewertungen
- BHARTIARTL BObachuDokument4 SeitenBHARTIARTL BObachuashviniNoch keine Bewertungen
- Fixed IncomeDokument2 SeitenFixed IncomeashviniNoch keine Bewertungen
- Adv Pack Historical DataDokument8 SeitenAdv Pack Historical DataAnisha MathurNoch keine Bewertungen
- Installed capacity cash flow analysisDokument20 SeitenInstalled capacity cash flow analysisashviniNoch keine Bewertungen
- Roles Functions Of: & SebiDokument61 SeitenRoles Functions Of: & SebiashviniNoch keine Bewertungen
- Indian Shadow Banking SystemDokument8 SeitenIndian Shadow Banking SystemashviniNoch keine Bewertungen
- Random Variables PDFDokument23 SeitenRandom Variables PDFashviniNoch keine Bewertungen
- Installed capacity cash flow analysisDokument20 SeitenInstalled capacity cash flow analysisashviniNoch keine Bewertungen
- Random VariablesDokument23 SeitenRandom VariablesashviniNoch keine Bewertungen
- Quarterly Report Airtel Africa Q4 FY19Dokument55 SeitenQuarterly Report Airtel Africa Q4 FY19ashviniNoch keine Bewertungen
- Separation of Ownership and ManagementDokument2 SeitenSeparation of Ownership and ManagementashviniNoch keine Bewertungen
- IB - Kenya Final PDFDokument14 SeitenIB - Kenya Final PDFashviniNoch keine Bewertungen
- IB - Kenya FinalDokument14 SeitenIB - Kenya FinalashviniNoch keine Bewertungen
- 5 4Dokument107 Seiten5 4ksr131Noch keine Bewertungen
- CBSE Class 12 Mathematics Matrices and Determinants Worksheet Set JDokument3 SeitenCBSE Class 12 Mathematics Matrices and Determinants Worksheet Set JChaitanya Sethi XI-BNoch keine Bewertungen
- Z TransformDokument37 SeitenZ Transformعلي كامل الاسديNoch keine Bewertungen
- LET Review 2014 September Drills PowerpointDokument83 SeitenLET Review 2014 September Drills PowerpointAubreyVelascoBongolanNoch keine Bewertungen
- Peano AxiomsDokument31 SeitenPeano AxiomsMilos TomicNoch keine Bewertungen
- 期末考解答與評分標準Dokument11 Seiten期末考解答與評分標準黃元湛Noch keine Bewertungen
- Integration-Solved Ex. & All Exercise Module-5Dokument10 SeitenIntegration-Solved Ex. & All Exercise Module-5Raju SinghNoch keine Bewertungen
- Inter Level - (Xi & Xii STD) Ramanujan Contest-2022Dokument4 SeitenInter Level - (Xi & Xii STD) Ramanujan Contest-2022Anju GuptaNoch keine Bewertungen
- Lecture Notes On Differentiation MATH161 PDFDokument12 SeitenLecture Notes On Differentiation MATH161 PDFalchemistNoch keine Bewertungen
- Nonlinear Regression MATLAB PDFDokument1 SeiteNonlinear Regression MATLAB PDFAndika Bayu AjiNoch keine Bewertungen
- Application of DerivativesDokument30 SeitenApplication of DerivativesDipankar KumarNoch keine Bewertungen
- Audio Processing in Matlab PDFDokument5 SeitenAudio Processing in Matlab PDFAditish Dede EtnizNoch keine Bewertungen
- CASIO ClasspadDokument22 SeitenCASIO ClasspadTara IzadiNoch keine Bewertungen
- A A - LVARO GONZA - LEZ Georg Cantor and Set TheoryDokument7 SeitenA A - LVARO GONZA - LEZ Georg Cantor and Set TheoryEl MolinicoNoch keine Bewertungen
- Final Exam 2021Dokument2 SeitenFinal Exam 2021Trần Toàn ThịnhNoch keine Bewertungen
- (Lecture Notes) Jyrki Lahtonen - Convolutional Codes (With Exercises in Finnish) (2013) PDFDokument76 Seiten(Lecture Notes) Jyrki Lahtonen - Convolutional Codes (With Exercises in Finnish) (2013) PDFAhsan JameelNoch keine Bewertungen
- Graph Theory - Solutions To Problem Set 3Dokument3 SeitenGraph Theory - Solutions To Problem Set 3Ángel GualeNoch keine Bewertungen
- Model Paper P1S1 MATHSDokument6 SeitenModel Paper P1S1 MATHSJanapareddy JanapareddyNoch keine Bewertungen
- Math Poem IVDokument3 SeitenMath Poem IVchemnikoNoch keine Bewertungen
- Edge-Weighted Graph AlgorithmsDokument12 SeitenEdge-Weighted Graph AlgorithmsSachinNoch keine Bewertungen
- Cme100 Matlab WorkbookDokument31 SeitenCme100 Matlab WorkbookdeabtegoddNoch keine Bewertungen
- mth108 MCQ For Practice PDFDokument2 Seitenmth108 MCQ For Practice PDFGowtham Chandrasekar100% (1)
- Module 3 - GENMATH 11Dokument14 SeitenModule 3 - GENMATH 11Agustin L. IdausosNoch keine Bewertungen
- 267947Dokument56 Seiten267947Víctor HugoNoch keine Bewertungen
- Matrices Worksheet 1Dokument4 SeitenMatrices Worksheet 1siany adeNoch keine Bewertungen
- Data Structure and Program Design Notes RtmnuDokument121 SeitenData Structure and Program Design Notes Rtmnuvishal mankar100% (1)
- Ncert Solutions Class 8 Math Chapter 2 Ex 2 4Dokument11 SeitenNcert Solutions Class 8 Math Chapter 2 Ex 2 4Vinayak MauryaNoch keine Bewertungen
- Add Maths Year 10Dokument17 SeitenAdd Maths Year 10Yenny TigaNoch keine Bewertungen
- A Second Course in Mathematics Concepts For PDFDokument468 SeitenA Second Course in Mathematics Concepts For PDFFrancisco JosivanNoch keine Bewertungen