Das könnte Ihnen auch gefallen
- Differential Transformation Method for Mechanical Engineering ProblemsVon EverandDifferential Transformation Method for Mechanical Engineering ProblemsNoch keine Bewertungen
- Experiment - 05: FIG1: 2 Prismatic Joint Manipulator FIG 2: 2 Prismatic Joint ManipulatorDokument8 SeitenExperiment - 05: FIG1: 2 Prismatic Joint Manipulator FIG 2: 2 Prismatic Joint ManipulatorManthan SinghNoch keine Bewertungen
- Experiment - 5: AIM-To Study Forward KinematicsDokument7 SeitenExperiment - 5: AIM-To Study Forward Kinematicsvarunmonga90Noch keine Bewertungen
- Static and Dynamic Characteristics of Measurement SystemDokument8 SeitenStatic and Dynamic Characteristics of Measurement Systemc5404Noch keine Bewertungen
- Cad Cam Automation Pune University Question PapersDokument8 SeitenCad Cam Automation Pune University Question PapersMajieed SkNoch keine Bewertungen
- Nov Dec 2018 Som Question Paper SPPUDokument6 SeitenNov Dec 2018 Som Question Paper SPPUaniket wadheNoch keine Bewertungen
- RaptorDokument27 SeitenRaptorJayachandra JcNoch keine Bewertungen
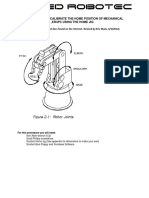
- Robotic ManualDokument47 SeitenRobotic ManualChhailender Singh BansalNoch keine Bewertungen
- Field RoboticsDokument70 SeitenField RoboticsSkanda SwaroopNoch keine Bewertungen
- Scorbot ER-III Arm Calibration & Testing (EDM)Dokument15 SeitenScorbot ER-III Arm Calibration & Testing (EDM)pauloNoch keine Bewertungen
- Experiment No 04 Ladder Diagram Development For Different Types of Logic GatesDokument7 SeitenExperiment No 04 Ladder Diagram Development For Different Types of Logic GatesRavindraNoch keine Bewertungen
- ScaraDokument7 SeitenScaraAnand Kumar MishraNoch keine Bewertungen
- Self Balancing Robot Using PidDokument21 SeitenSelf Balancing Robot Using Pidline follower robotNoch keine Bewertungen
- Design and Development of Robotic Arm For Cutting TreeDokument10 SeitenDesign and Development of Robotic Arm For Cutting TreeMarko IvanovicNoch keine Bewertungen
- Project 1 - Robotic ArmDokument19 SeitenProject 1 - Robotic ArmAizzat ZackNoch keine Bewertungen
- Oie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamceDokument48 SeitenOie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamcemaniNoch keine Bewertungen
- Assignment 2Dokument5 SeitenAssignment 2aiao90Noch keine Bewertungen
- PCB Drilling MachineDokument15 SeitenPCB Drilling MachinelalitlakshyNoch keine Bewertungen
- Mechanics of Machines Dr. Mohammad Kilani: Class 2 Fundamental ConceptsDokument64 SeitenMechanics of Machines Dr. Mohammad Kilani: Class 2 Fundamental ConceptsRavi TarunNoch keine Bewertungen
- Kinematic Matlab HelpDokument201 SeitenKinematic Matlab Helpkush_mech9657Noch keine Bewertungen
- Monitoring and Control of Solar Power System Using Reliance SCADADokument4 SeitenMonitoring and Control of Solar Power System Using Reliance SCADAEditor IJTSRDNoch keine Bewertungen
- JacobianDokument3 SeitenJacobianAtse Dida Eyes0% (1)
- Cu Spray Robot LastDokument42 SeitenCu Spray Robot LastRakibul HassanNoch keine Bewertungen
- Robot MechanismsDokument17 SeitenRobot MechanismssnoozermanNoch keine Bewertungen
- Evolution of Electrical EngineeringDokument32 SeitenEvolution of Electrical EngineeringMarvin GagarinNoch keine Bewertungen
- 139 Notes s16Dokument66 Seiten139 Notes s16Carl Patrick Erni RagasNoch keine Bewertungen
- M.SC Applied Electronics - Linear ICs and Its Applications - Course Syllabus & Material - All Units (Bharathiar University)Dokument96 SeitenM.SC Applied Electronics - Linear ICs and Its Applications - Course Syllabus & Material - All Units (Bharathiar University)KUMARNoch keine Bewertungen
- Nao Presentation - Robotics Lab, KCTDokument16 SeitenNao Presentation - Robotics Lab, KCTRamkumar ANoch keine Bewertungen
- EncoderDokument44 SeitenEncoderdaiduongxanh14113Noch keine Bewertungen
- Bionics / Bio RoboticsDokument15 SeitenBionics / Bio RoboticsAngelyne PotencianoNoch keine Bewertungen
- UPSC-IES Weightage For Topics in Civil, Mechanical, Electrical and Electronics - India Vidya PDFDokument4 SeitenUPSC-IES Weightage For Topics in Civil, Mechanical, Electrical and Electronics - India Vidya PDFprachimahajan0183% (6)
- Modelling and Control of A QuadrocopterDokument10 SeitenModelling and Control of A QuadrocopterAdi Mulyadi100% (1)
- IAT0922 Industrial Robotics Chapter2 Rev4Dokument79 SeitenIAT0922 Industrial Robotics Chapter2 Rev4visionNoch keine Bewertungen
- Final Year Project Report Robotic ArmDokument11 SeitenFinal Year Project Report Robotic ArmAmr ElsakkaNoch keine Bewertungen
- DESIGN OF MACHINERY - Problem 4-18gDokument2 SeitenDESIGN OF MACHINERY - Problem 4-18gGiordano VieiraNoch keine Bewertungen
- Design and Fabrication of Stair Climbing Hand Cart: Government Engineering CollegeDokument28 SeitenDesign and Fabrication of Stair Climbing Hand Cart: Government Engineering CollegeFayyaz NadeemNoch keine Bewertungen
- Intro2robotics PPT SMRDokument48 SeitenIntro2robotics PPT SMRapi-115728880Noch keine Bewertungen
- Mechanics and Control in RoboticsDokument570 SeitenMechanics and Control in RoboticsMohammad SafaeipourNoch keine Bewertungen
- Scilab ProgramsDokument47 SeitenScilab ProgramsNatraj Anita Prabhurao HulsureNoch keine Bewertungen
- Robotic SensorsDokument43 SeitenRobotic SensorsArivukkarasan RajaNoch keine Bewertungen
- RobotDokument5 SeitenRobotSonal Mehir RamjununNoch keine Bewertungen
- Techno-Environmental Feature-Based Sun Tracking Model Fabrication & Optimal Analyses by Precise Position AlgorithmDokument9 SeitenTechno-Environmental Feature-Based Sun Tracking Model Fabrication & Optimal Analyses by Precise Position AlgorithmInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Key Words - Arduino UNO, Motor Shield L293d, Ultrasonic Sensor HC-SR04, DCDokument17 SeitenKey Words - Arduino UNO, Motor Shield L293d, Ultrasonic Sensor HC-SR04, DCBîswãjït NãyàkNoch keine Bewertungen
- Robotic Platform For Monitoring Underground Cable SystemsDokument5 SeitenRobotic Platform For Monitoring Underground Cable SystemsAcap klNoch keine Bewertungen
- Sri Venkateswara College of Engineering Course Delivery Plan - Theory Page 1 of 6Dokument6 SeitenSri Venkateswara College of Engineering Course Delivery Plan - Theory Page 1 of 6Ravinder Reddy SimalaNoch keine Bewertungen
- Seminar ReportDokument24 SeitenSeminar ReportAnup BorseNoch keine Bewertungen
- GATE 2021 Brochure V1 PDFDokument165 SeitenGATE 2021 Brochure V1 PDFANADI GAUTAMNoch keine Bewertungen
- Dee3071 Electronic Computer Aided Design (Ecad) - SDokument6 SeitenDee3071 Electronic Computer Aided Design (Ecad) - Skshika meganathanNoch keine Bewertungen
- Great Yuva Cutting and WeldingDokument20 SeitenGreat Yuva Cutting and WeldingCOSMO WELDNoch keine Bewertungen
- Principles of Motion Howie Choset, Kevin M. Lynch, Seth HutchinsonDokument616 SeitenPrinciples of Motion Howie Choset, Kevin M. Lynch, Seth Hutchinsonszxd100% (3)
- 13.2 Line IntegralsDokument17 Seiten13.2 Line Integrals21142467Noch keine Bewertungen
- Introduction To Robotics (CS223A) Homework #3 (Winter 2007/2008)Dokument2 SeitenIntroduction To Robotics (CS223A) Homework #3 (Winter 2007/2008)Shukrullo NazirjonovNoch keine Bewertungen
- 05-02-22 JR - Iit Star Co-Sc (Model-A) Jee Adv 2017 (P-I) Wat-38 Key & SolDokument10 Seiten05-02-22 JR - Iit Star Co-Sc (Model-A) Jee Adv 2017 (P-I) Wat-38 Key & SolChembzzz ytNoch keine Bewertungen
- 05-09-21 JR - Iit Star Co-Sc (Model-B) Jee Adv 2018 (P-I) Wat-18 Key & SolDokument8 Seiten05-09-21 JR - Iit Star Co-Sc (Model-B) Jee Adv 2018 (P-I) Wat-18 Key & SolIshita ReddyNoch keine Bewertungen
- Math CompreA (OAC)Dokument8 SeitenMath CompreA (OAC)SHUSWABHIT SHADANGINoch keine Bewertungen
- Mws Gen Pde TXT ParabolicDokument27 SeitenMws Gen Pde TXT ParabolicJoan MaryNoch keine Bewertungen
- Lab Sheet Trif SuspensionDokument4 SeitenLab Sheet Trif SuspensionHUMAID SIDDIQUINoch keine Bewertungen
- The Newmark Method: T T U T U T TDokument6 SeitenThe Newmark Method: T T U T U T TanirbanNoch keine Bewertungen
- Solution Exercise (Line Integrals)Dokument12 SeitenSolution Exercise (Line Integrals)iffatul mahyaNoch keine Bewertungen
- ME - 2017 Set I Key Solution11Dokument25 SeitenME - 2017 Set I Key Solution11UTKARSH SHARMANoch keine Bewertungen
- Result AnalysisDokument1 SeiteResult AnalysisFinto RaphelNoch keine Bewertungen
- Stepper MotorDokument16 SeitenStepper MotoranaNoch keine Bewertungen
- General Presentation LV and ServomotorsDokument22 SeitenGeneral Presentation LV and ServomotorsFinto RaphelNoch keine Bewertungen
- Rank Iist Homoeo Medical Interview:: Dpmsu Rank No. Name CandidateDokument4 SeitenRank Iist Homoeo Medical Interview:: Dpmsu Rank No. Name CandidateFinto RaphelNoch keine Bewertungen
- A Non-Invasive Method For Measuring Blood Flow Rate in SuperficiaDokument81 SeitenA Non-Invasive Method For Measuring Blood Flow Rate in SuperficiaFinto RaphelNoch keine Bewertungen
- Transportation ProblemsDokument64 SeitenTransportation ProblemsDaniel NimabwayaNoch keine Bewertungen
- Third Edition: Kermit Sigmon Department of Mathematics University of FloridaDokument39 SeitenThird Edition: Kermit Sigmon Department of Mathematics University of FloridaWilliam ChunNoch keine Bewertungen
- LOGARITHMSDokument10 SeitenLOGARITHMSpiyushNoch keine Bewertungen
- Mws Che Ode TXT Runge4th ExamplesDokument6 SeitenMws Che Ode TXT Runge4th ExamplesDheiver SantosNoch keine Bewertungen
- Notes On Minimum Cost Network Flow ModelsDokument8 SeitenNotes On Minimum Cost Network Flow Modelssusheelshastry542Noch keine Bewertungen
- Chapter 1 - Vector AnalysisDokument54 SeitenChapter 1 - Vector AnalysisandersonNoch keine Bewertungen
- Determinants MCQSDokument5 SeitenDeterminants MCQSNoo EntryNoch keine Bewertungen
- Cuerpo RigidoDokument37 SeitenCuerpo RigidoByron AyalaNoch keine Bewertungen
- Quiz+1+ +2+solnDokument2 SeitenQuiz+1+ +2+solnAbdul Hannan SohailNoch keine Bewertungen
- Annexure-74. (B.sc. (Hons) Maths (REVISED)Dokument86 SeitenAnnexure-74. (B.sc. (Hons) Maths (REVISED)hmingthansangiNoch keine Bewertungen
- Signals and Systems (Practice Questions - Z-Transform) PDFDokument28 SeitenSignals and Systems (Practice Questions - Z-Transform) PDFmadivala nagarajaNoch keine Bewertungen
- Examples in C++Dokument39 SeitenExamples in C++ZhvannNoch keine Bewertungen
- Mechanical Engineering: Syllabus For OlympiadDokument3 SeitenMechanical Engineering: Syllabus For OlympiadRishit ShahNoch keine Bewertungen
- IITH Data StructuresDokument2 SeitenIITH Data StructuresPriyesh PandeyNoch keine Bewertungen
- Pre CalculusDokument42 SeitenPre CalculusKevin Booker0% (1)
- Fundamentals of Mathematical StatisticsDokument23 SeitenFundamentals of Mathematical StatisticsSudeep MazumdarNoch keine Bewertungen
- Matrices Worksheet 1Dokument4 SeitenMatrices Worksheet 1siany adeNoch keine Bewertungen
- Analysis of Stersses General State of Stress at A Point:: X XX XDokument8 SeitenAnalysis of Stersses General State of Stress at A Point:: X XX XMuhammed SulfeekNoch keine Bewertungen
- Bicubic Interpolation: Xiao ShuDokument44 SeitenBicubic Interpolation: Xiao Shu12bossNoch keine Bewertungen
- Adc 1 PDFDokument2 SeitenAdc 1 PDFSalmanNoch keine Bewertungen
- On The Compression of A CylinderDokument67 SeitenOn The Compression of A CylinderfrankNoch keine Bewertungen
- Exercise - 6 PDFDokument6 SeitenExercise - 6 PDFKritiNoch keine Bewertungen
- Transform Analysis of LTI SystemsDokument62 SeitenTransform Analysis of LTI Systemshakkem bNoch keine Bewertungen
- Robotics LabDokument10 SeitenRobotics LabAbdul Moiz QarniNoch keine Bewertungen
- 9.3 Representing Relations: 1 2 M 1 2 N R IjDokument6 Seiten9.3 Representing Relations: 1 2 M 1 2 N R IjK. VIJAY KUMARNoch keine Bewertungen
- Calculus 1 - Limits - Worksheet 10 - The Squeezing TheoremDokument23 SeitenCalculus 1 - Limits - Worksheet 10 - The Squeezing TheoremUtsab DasNoch keine Bewertungen
- CalcAnswersCh7 Nswers To Exercises For Chapter 7 Logarithmic and Exponential Functions PDFDokument7 SeitenCalcAnswersCh7 Nswers To Exercises For Chapter 7 Logarithmic and Exponential Functions PDFMd Ibrahim MollaNoch keine Bewertungen
- MCQ Cse PutDokument8 SeitenMCQ Cse PutAnurag ChauhanNoch keine Bewertungen
- 2 - Mass Probability Function of A Discrete Random VariableDokument24 Seiten2 - Mass Probability Function of A Discrete Random VariableNathaliaEicellRoseBuenoNoch keine Bewertungen