Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Sicam TM Io Module EngDokument139 SeitenSicam TM Io Module EngGokhan MertNoch keine Bewertungen
- DPI 530 User ManualDokument45 SeitenDPI 530 User ManualtrpsivaNoch keine Bewertungen
- CM2283 MCT EnvAcelDokument4 SeitenCM2283 MCT EnvAcelAdrián MolineroNoch keine Bewertungen
- Apgenco Assistant Engineer (Electrical) Exam Syllabus: 1. Electrical Circuits and NetworksDokument1 SeiteApgenco Assistant Engineer (Electrical) Exam Syllabus: 1. Electrical Circuits and NetworksCh RajaNoch keine Bewertungen
- Solutions 6Dokument4 SeitenSolutions 6Mi HoangNoch keine Bewertungen
- Ds 1ln6 Uu U Utp Cat6 4p0.565 PVC CMDokument1 SeiteDs 1ln6 Uu U Utp Cat6 4p0.565 PVC CMFelisha FebryNoch keine Bewertungen
- VFD Panel-20.01Dokument8 SeitenVFD Panel-20.01yadveshNoch keine Bewertungen
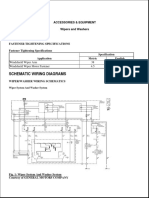
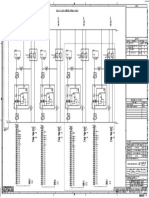
- 149 - Wipers and WashersDokument84 Seiten149 - Wipers and WashersGedas GvildysNoch keine Bewertungen
- Auto Gate System: General DescriptionDokument11 SeitenAuto Gate System: General DescriptionmalbstNoch keine Bewertungen
- Service Manual: History Information For The Following ManualDokument34 SeitenService Manual: History Information For The Following ManualHamza AbbasiNoch keine Bewertungen
- Socomec AtysDokument2 SeitenSocomec AtysmehdivinciNoch keine Bewertungen
- ModulesDokument52 SeitenModulesJimmyRoseNoch keine Bewertungen
- AC Servo Motor & Driver: MINAS E-SeriesDokument11 SeitenAC Servo Motor & Driver: MINAS E-SeriesDnieto UniformesNoch keine Bewertungen
- Ac Motor: Motor System Level DiagramDokument3 SeitenAc Motor: Motor System Level DiagramDan ZkyNoch keine Bewertungen
- Electric Circuit Note Chapter 2 PDFDokument37 SeitenElectric Circuit Note Chapter 2 PDFnurul najihah100% (2)
- Akhwat Yar MirzaDokument1 SeiteAkhwat Yar MirzaAnonymous BZQOJwWIh6Noch keine Bewertungen
- The Calculation of The Temperature Rise and Load Capability of Cable SystemsDokument13 SeitenThe Calculation of The Temperature Rise and Load Capability of Cable SystemsRogelio Revetti100% (1)
- Ece 4990 SyllabusDokument2 SeitenEce 4990 Syllabusmgi580Noch keine Bewertungen
- Strong Cast: Test Full AmplifiersDokument8 SeitenStrong Cast: Test Full AmplifiersyanmaesNoch keine Bewertungen
- Service Manual: NSX-T99 NSX-T99EDokument21 SeitenService Manual: NSX-T99 NSX-T99EGlaucia MachadoNoch keine Bewertungen
- DMA Actuator Drives For - Motorised Butterfly Valve DMK - Motorised Throttle DMLDokument8 SeitenDMA Actuator Drives For - Motorised Butterfly Valve DMK - Motorised Throttle DMLemil_88Noch keine Bewertungen
- Hcf4017 Data SheetDokument11 SeitenHcf4017 Data SheetFilipe CoimbraNoch keine Bewertungen
- Data Sheet ZenerDokument2 SeitenData Sheet ZenerMeitaNoch keine Bewertungen
- Flood Light: Technical SpecificationsDokument1 SeiteFlood Light: Technical SpecificationsVikaas JainNoch keine Bewertungen
- Opto Triac RapidosDokument6 SeitenOpto Triac RapidosAnonymous oEoCVNhu7HNoch keine Bewertungen
- ARC-23304 Warrior Product DataDokument4 SeitenARC-23304 Warrior Product DataAmando FuentesNoch keine Bewertungen
- Maximum Reliability and Minimal Maintenance: Pantograph Disconnectors Upto 550kV - GW54Dokument2 SeitenMaximum Reliability and Minimal Maintenance: Pantograph Disconnectors Upto 550kV - GW54Han Huang100% (1)
- PMMCDokument66 SeitenPMMCEvoque YTNoch keine Bewertungen
- TCD 094 DS4Dokument1 SeiteTCD 094 DS4Ace Noah SomintacNoch keine Bewertungen