Das könnte Ihnen auch gefallen
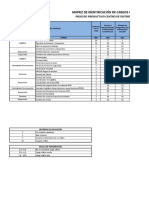
- Matriz de Identificación de Cargos CríticosDokument3 SeitenMatriz de Identificación de Cargos CríticosAlfonso Valdivia67% (3)
- IOS Y ANDROID (Caracteristicas, HistoriaDokument33 SeitenIOS Y ANDROID (Caracteristicas, HistoriaGustavo Lopez CNoch keine Bewertungen
- Guia Practica para Crear Planes de ContingenciaDokument80 SeitenGuia Practica para Crear Planes de ContingenciaLuis Fernando TiconaNoch keine Bewertungen
- Condiciones y Medio Ambiente de Trabajo (Cymat)Dokument46 SeitenCondiciones y Medio Ambiente de Trabajo (Cymat)Morla LucyNoch keine Bewertungen
- Trabajo Final Criminalistica Prof. Miguel Puello MaldonadoDokument25 SeitenTrabajo Final Criminalistica Prof. Miguel Puello MaldonadoErick PerezNoch keine Bewertungen
- Bullet Los 7 Principios de La CriminalisDokument4 SeitenBullet Los 7 Principios de La CriminalisPedro René Estrada EspinoNoch keine Bewertungen
- Tarea 5 de Gestion HumanaaaDokument5 SeitenTarea 5 de Gestion HumanaaaJahaira PortalatinNoch keine Bewertungen
- Ce #2Dokument7 SeitenCe #2Ramses TatisNoch keine Bewertungen
- Tarea Semana Viii de Practica Juridica IDokument17 SeitenTarea Semana Viii de Practica Juridica IDaniela Torres RamírezNoch keine Bewertungen
- Tarea Vi CriminalisticaDokument12 SeitenTarea Vi CriminalisticaBEATO MATIASNoch keine Bewertungen
- 5.-Valoración y Clasificación de Las HeridasDokument18 Seiten5.-Valoración y Clasificación de Las HeridasDaner Vera FuenzalidaNoch keine Bewertungen
- Tarea 2Dokument13 SeitenTarea 2Manuel MunozNoch keine Bewertungen
- Tarea V O VI, Derecho Comercial IIDokument7 SeitenTarea V O VI, Derecho Comercial IImercyNoch keine Bewertungen
- Sistema de Informaacion para Compras y AbastecimientosDokument61 SeitenSistema de Informaacion para Compras y AbastecimientosGerardo Esparza100% (1)
- Tarea IDokument7 SeitenTarea IyudelkaNoch keine Bewertungen
- Primer Informe TeleinformaticaDokument21 SeitenPrimer Informe TeleinformaticaRuddyCheroChiclayoNoch keine Bewertungen
- Informe de RequerimientosDokument9 SeitenInforme de Requerimientosidkc1986Noch keine Bewertungen
- Empresas de Base TecnologicaDokument29 SeitenEmpresas de Base TecnologicayymmyyNoch keine Bewertungen
- Trabajo Final de Procesal Penal 1Dokument7 SeitenTrabajo Final de Procesal Penal 1Cesarina GomezNoch keine Bewertungen
- Formulación y Desarrollo de Una Estrategia de Servicio Al ClienteDokument8 SeitenFormulación y Desarrollo de Una Estrategia de Servicio Al ClienteLorena CastiblancoNoch keine Bewertungen
- Tarea IV TecnologiaDokument4 SeitenTarea IV TecnologiaEduardo Gomez50% (2)
- Proyecto FinalDokument26 SeitenProyecto Finalhenry castilloNoch keine Bewertungen
- Tarea de PenalDokument7 SeitenTarea de PenalKatiuska MichellNoch keine Bewertungen
- Analisis CombinatorioDokument10 SeitenAnalisis CombinatorioAndy SolisNoch keine Bewertungen
- Tarea I Derecho Laboral II Mirian para Enviar UapaDokument5 SeitenTarea I Derecho Laboral II Mirian para Enviar UapaMirian GarciaNoch keine Bewertungen
- Tarea 3 Psicologia IndustrialDokument4 SeitenTarea 3 Psicologia IndustrialEsther Marzan MartinezNoch keine Bewertungen
- Planificación de Medios I 2015-2016 (StuDocu) PDFDokument27 SeitenPlanificación de Medios I 2015-2016 (StuDocu) PDFNereaNoch keine Bewertungen
- Mercadotecnia 2 Tarea 5Dokument6 SeitenMercadotecnia 2 Tarea 5Juan Francisco ChavezNoch keine Bewertungen
- DER-325 Penonología y Derecho Penitenciario PDFDokument14 SeitenDER-325 Penonología y Derecho Penitenciario PDFYericaNoch keine Bewertungen
- Proyecto Final de Teleinformatica - RedesDokument34 SeitenProyecto Final de Teleinformatica - RedesnnggNoch keine Bewertungen
- Trabajo PantaleonDokument14 SeitenTrabajo PantaleonYudith Farida Tavarez PeñaNoch keine Bewertungen
- Trabajo Final de Derecho Procesal Civil 3Dokument6 SeitenTrabajo Final de Derecho Procesal Civil 3Isaac Green HidalgoNoch keine Bewertungen
- Unidad III Comercio ElectronicoDokument6 SeitenUnidad III Comercio ElectronicoOttoniel J. RodriguezNoch keine Bewertungen
- Tarea 3, Electrónica Básica UapaDokument6 SeitenTarea 3, Electrónica Básica UapaLeandro Ubrí LorenzoNoch keine Bewertungen
- Tarea IV Etiqueta y ProtocoloDokument1 SeiteTarea IV Etiqueta y ProtocoloMilena Jose JimenezNoch keine Bewertungen
- Tarea 2 de Derecho Civil VI...Dokument7 SeitenTarea 2 de Derecho Civil VI...Ambar de LeonNoch keine Bewertungen
- Tarea 3 DER226Dokument10 SeitenTarea 3 DER226Yosi RamírezNoch keine Bewertungen
- Tarea 5 Procesal Penal 1 NaysyDokument4 SeitenTarea 5 Procesal Penal 1 Naysynaysy leoannyNoch keine Bewertungen
- Tarea VLLL MarketingDokument4 SeitenTarea VLLL MarketingAnddy Vasquez FabianNoch keine Bewertungen
- Tarea 10 Psicologia General IDokument6 SeitenTarea 10 Psicologia General Inatali azorNoch keine Bewertungen
- Tarea 2 Derecho Civil 6Dokument5 SeitenTarea 2 Derecho Civil 6Raini BeatoNoch keine Bewertungen
- Tarea 2 Derecho Civil VI 15-09-2018Dokument4 SeitenTarea 2 Derecho Civil VI 15-09-2018Brayan Nolasco VillaNoch keine Bewertungen
- Tarea de La UAPADokument10 SeitenTarea de La UAPACarlos CruzNoch keine Bewertungen
- Tarea 5, Legislacion Monetaria y FinancieraDokument10 SeitenTarea 5, Legislacion Monetaria y FinancieraJairo Aren100% (1)
- Tarea 1 de Practica Juridica III PDFDokument7 SeitenTarea 1 de Practica Juridica III PDFSarahNoch keine Bewertungen
- 4532-Texto Del Artículo-16573-1-10-20170124Dokument15 Seiten4532-Texto Del Artículo-16573-1-10-20170124Nilia RamirezNoch keine Bewertungen
- Tarea 4 SeminarioDokument14 SeitenTarea 4 Seminariolaura michelleNoch keine Bewertungen
- Recurso de ApelacionDokument2 SeitenRecurso de Apelacionflor gomezNoch keine Bewertungen
- Tarea 4Dokument6 SeitenTarea 4Erick Perez100% (2)
- TareaDokument4 SeitenTareayeudryNoch keine Bewertungen
- UNIVERSIDAD ABIERTA PARA ADULTOS Tarea 4Dokument10 SeitenUNIVERSIDAD ABIERTA PARA ADULTOS Tarea 4gerinaldavidalmendezNoch keine Bewertungen
- Trabajo Final DPC2Dokument10 SeitenTrabajo Final DPC2Ana CarolinaNoch keine Bewertungen
- Evaluación de La Calidad Del Software EducativoDokument4 SeitenEvaluación de La Calidad Del Software EducativolicetteNoch keine Bewertungen
- Emigrantes ConguateDokument125 SeitenEmigrantes ConguatesuperofidoNoch keine Bewertungen
- Espacio para Enviar Tarea No PIII 2018Dokument51 SeitenEspacio para Enviar Tarea No PIII 2018Maria RodriguezNoch keine Bewertungen
- Proceso Registro de SoftwareDokument2 SeitenProceso Registro de SoftwareÉver Regalado LúeNoch keine Bewertungen
- Tarea 2 de La Organización JudicialDokument7 SeitenTarea 2 de La Organización JudicialyuriNoch keine Bewertungen
- Tarea 1 DER 226Dokument14 SeitenTarea 1 DER 226Yosi RamírezNoch keine Bewertungen
- Tarea 4 Metodologia de La Investigacion LVDokument10 SeitenTarea 4 Metodologia de La Investigacion LVRaileny RodriguezNoch keine Bewertungen
- Tarea V de Legislacion Monetaria y FinancieraDokument8 SeitenTarea V de Legislacion Monetaria y FinancieraLuisana GutierrezNoch keine Bewertungen
- Lecturas Email MarketingDokument92 SeitenLecturas Email MarketingAmanda Cosme GonzalezNoch keine Bewertungen
- Tesis: Facultad de Ciencias E Ingeniería Escuela Profesional de Ingeniería Electrónica Con Mención en TelecomunicacionesDokument150 SeitenTesis: Facultad de Ciencias E Ingeniería Escuela Profesional de Ingeniería Electrónica Con Mención en Telecomunicacionesjhonatan huaman tineoNoch keine Bewertungen
- Tesis de Grado Previo A La Obtención Del Título deDokument465 SeitenTesis de Grado Previo A La Obtención Del Título deRolando VlNoch keine Bewertungen
- Evaluación de Sensores para Su Conexión A Tarjeta ArduinoDokument137 SeitenEvaluación de Sensores para Su Conexión A Tarjeta Arduinopaco1805Noch keine Bewertungen
- Perfil Red Neuronal v1.0Dokument29 SeitenPerfil Red Neuronal v1.0Carlos QuintoNoch keine Bewertungen
- Sistema de Freno HidráulicoDokument6 SeitenSistema de Freno Hidráulicomanzanedamiguel126Noch keine Bewertungen
- ERP (Enterprise Resource Planning) MRPDokument3 SeitenERP (Enterprise Resource Planning) MRPBrayan Vasquez PeredaNoch keine Bewertungen
- PK-Plus ManualDokument42 SeitenPK-Plus ManualpasckyNoch keine Bewertungen
- Piad-417 TrabajofinalDokument3 SeitenPiad-417 TrabajofinalCristian AmaroNoch keine Bewertungen
- Guia-Economía-11°-Julio RodriguezDokument8 SeitenGuia-Economía-11°-Julio Rodriguezfelipe100% (1)
- Sistema y Organizaciones Tp2Dokument17 SeitenSistema y Organizaciones Tp2Agustina SantillanNoch keine Bewertungen
- Ejercicios Propuestos Memorias Mapa Memorias PDFDokument2 SeitenEjercicios Propuestos Memorias Mapa Memorias PDFAntonio Andres Duffoo MarroquinNoch keine Bewertungen
- Diseño Curricular Regional PDFDokument492 SeitenDiseño Curricular Regional PDFLUIS EDWIN JIMÉNEZ MONTAÑEZNoch keine Bewertungen
- Programa Tentativo UICDokument1 SeitePrograma Tentativo UICCadena 3Noch keine Bewertungen
- Técnicas de Recolección de InformaciónDokument8 SeitenTécnicas de Recolección de InformaciónLiss RodNoch keine Bewertungen
- PolimorfismoDokument16 SeitenPolimorfismoJOSHUA ANDRE ISLAS GARCIANoch keine Bewertungen
- Base de Datos en AccessDokument12 SeitenBase de Datos en AccessFranklin MendezNoch keine Bewertungen
- Taller Respuestas A Preguntas Sobre Video La MetaDokument2 SeitenTaller Respuestas A Preguntas Sobre Video La MetaJuan David DiazgranadosNoch keine Bewertungen
- 04 4 TALLER Redes Comando PingDokument6 Seiten04 4 TALLER Redes Comando PingElissa Castellar MartinezNoch keine Bewertungen
- Esquema Del Proyecto de innovación-MDLL-2021Dokument8 SeitenEsquema Del Proyecto de innovación-MDLL-2021CHRISTIAN GARFIASNoch keine Bewertungen
- COMPROBANTESDokument30 SeitenCOMPROBANTESBarajas ChavezNoch keine Bewertungen
- VIP - Guía Completa Sobre Los Campus v3 SzmjzsDokument20 SeitenVIP - Guía Completa Sobre Los Campus v3 SzmjzsOliver SanchezNoch keine Bewertungen
- Gitlab CIDokument61 SeitenGitlab CIkrobertoNoch keine Bewertungen
- 1123593622-HYMER Caravans 2006 SpanischDokument52 Seiten1123593622-HYMER Caravans 2006 SpanischxpradoNoch keine Bewertungen
- Galvanic Body SpaDokument2 SeitenGalvanic Body SpaSusana MaquedaNoch keine Bewertungen
- Fundamentos de Programación Estructurada y Estructuras Cíclicas GA3Dokument6 SeitenFundamentos de Programación Estructurada y Estructuras Cíclicas GA3Yuderly Alvarez camposNoch keine Bewertungen
- Prospectiva EstratégicaDokument5 SeitenProspectiva EstratégicaDafne TorresNoch keine Bewertungen
- Catálogo Panamá Versión AzulDokument18 SeitenCatálogo Panamá Versión AzulAnonymous el3M20y13qNoch keine Bewertungen
- Puente Levadizo AutomatizadoDokument4 SeitenPuente Levadizo AutomatizadoJairo PascagazaNoch keine Bewertungen
- Motor de 200 HP 4 Polos Weg Frame 445TDokument5 SeitenMotor de 200 HP 4 Polos Weg Frame 445TMaximiliano QueralesNoch keine Bewertungen