Das könnte Ihnen auch gefallen
- T3.a SIMULACIÓN DE REACTORESDokument2 SeitenT3.a SIMULACIÓN DE REACTORESNicolHernandezNarvaezNoch keine Bewertungen
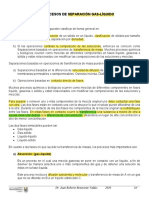
- Procesos de separación gas-líquidoDokument21 SeitenProcesos de separación gas-líquidoNicolHernandezNarvaezNoch keine Bewertungen
- TercerExamenParcial MasaI EneJun2022Dokument1 SeiteTercerExamenParcial MasaI EneJun2022NicolHernandezNarvaezNoch keine Bewertungen
- Difusión Molecular en SólidosDokument4 SeitenDifusión Molecular en SólidosNicolHernandezNarvaezNoch keine Bewertungen
- Coeficientes de Transferencia de Masa - LecturaDokument14 SeitenCoeficientes de Transferencia de Masa - LecturaNicolHernandezNarvaezNoch keine Bewertungen
- LAB 3. 2 Columnas de DestilaciónDokument30 SeitenLAB 3. 2 Columnas de DestilaciónNicolHernandezNarvaezNoch keine Bewertungen
- Formulario Difusión - 1erpDokument22 SeitenFormulario Difusión - 1erpNicolHernandezNarvaezNoch keine Bewertungen
- IntroducciónDokument8 SeitenIntroducciónNicolHernandezNarvaezNoch keine Bewertungen
- Tarea 1. Ecuación General Del Transporte MolecularDokument3 SeitenTarea 1. Ecuación General Del Transporte MolecularNicolHernandezNarvaezNoch keine Bewertungen
- Cuadro LatinoDokument1 SeiteCuadro LatinoNicolHernandezNarvaezNoch keine Bewertungen
- Cap 30 Higiene IndustrialDokument38 SeitenCap 30 Higiene IndustrialEdgar Andres Bautista SuarezNoch keine Bewertungen
- Examenes RecopilaciónDokument4 SeitenExamenes RecopilaciónNicolHernandezNarvaezNoch keine Bewertungen
- EQ1. Trat. AguaDokument41 SeitenEQ1. Trat. AguaNicolHernandezNarvaezNoch keine Bewertungen
- Apuntes Parcial 1Dokument3 SeitenApuntes Parcial 1NicolHernandezNarvaezNoch keine Bewertungen
- FQM Unidad 2Dokument72 SeitenFQM Unidad 2NicolHernandezNarvaezNoch keine Bewertungen
- Tarea 2 - Problema 3Dokument1 SeiteTarea 2 - Problema 3NicolHernandezNarvaezNoch keine Bewertungen
- Tensión Resumen2Dokument2 SeitenTensión Resumen2NicolHernandezNarvaezNoch keine Bewertungen
- Las 5 Fuerzas de PorterDokument59 SeitenLas 5 Fuerzas de PorterNicolHernandezNarvaezNoch keine Bewertungen
- Catalizadores Que Se EmpleanDokument5 SeitenCatalizadores Que Se EmpleanNicolHernandezNarvaezNoch keine Bewertungen
- Fisicoquímica de MaterialesDokument102 SeitenFisicoquímica de MaterialesNicolHernandezNarvaezNoch keine Bewertungen
- FQM Unidad 2Dokument72 SeitenFQM Unidad 2NicolHernandezNarvaezNoch keine Bewertungen
- Evaluación de proyectos de inversión: Análisis de mercadoDokument50 SeitenEvaluación de proyectos de inversión: Análisis de mercadoNicolHernandezNarvaezNoch keine Bewertungen
- AA. Diagrama de Ruta CríticaDokument1 SeiteAA. Diagrama de Ruta CríticaNicolHernandezNarvaezNoch keine Bewertungen
- Ejercicios Valor Del Dinero en El TiempoDokument1 SeiteEjercicios Valor Del Dinero en El TiempoNicolHernandezNarvaezNoch keine Bewertungen
- AA Secuenciación de TrabajosDokument1 SeiteAA Secuenciación de TrabajosNicolHernandezNarvaezNoch keine Bewertungen
- Diagramas de FasesDokument4 SeitenDiagramas de FasesNicolHernandezNarvaezNoch keine Bewertungen
- AA Diagrama GanttDokument1 SeiteAA Diagrama GanttNicolHernandezNarvaezNoch keine Bewertungen
- Aplicaciones Del Cobalto (Demanda)Dokument52 SeitenAplicaciones Del Cobalto (Demanda)NicolHernandezNarvaezNoch keine Bewertungen
- 03cap1 PDFDokument20 Seiten03cap1 PDFSammy PinedaNoch keine Bewertungen
- TFG Enrique Herraiz Lalana Titanio y AleacionesDokument88 SeitenTFG Enrique Herraiz Lalana Titanio y AleacionesRoberto De La OlivaNoch keine Bewertungen
- Diferencias Entre La Frecuencia de 50 y 60 HertzDokument2 SeitenDiferencias Entre La Frecuencia de 50 y 60 HertzJorge Ramirez Velasquez100% (1)
- Motores Eléctricos ResueltoDokument3 SeitenMotores Eléctricos Resueltogustavo orue0% (1)
- 530.maquinas Electricas IIDokument8 Seiten530.maquinas Electricas IIJoel AlejandroNoch keine Bewertungen
- Variador de VelocidadDokument26 SeitenVariador de VelocidadXfrali Medina GuevaraNoch keine Bewertungen
- Unidad IV - ING ELECTRICA - LEONEL MORANDokument9 SeitenUnidad IV - ING ELECTRICA - LEONEL MORANJosmaryNoch keine Bewertungen
- Laboratorio Electrotecnia U AtlánticoDokument15 SeitenLaboratorio Electrotecnia U AtlánticoGeorge Jimenez GuerreroNoch keine Bewertungen
- Trabajo de RecuperaciónDokument34 SeitenTrabajo de RecuperaciónRicardo ZambranoNoch keine Bewertungen
- AT7 Series Instrument User Manual Ver 1.0 20190620.en - EsDokument68 SeitenAT7 Series Instrument User Manual Ver 1.0 20190620.en - Esjose olveraNoch keine Bewertungen
- Solucion Examen Final de MaquinasDokument9 SeitenSolucion Examen Final de MaquinasEdwin CabreraNoch keine Bewertungen
- 1 Calculo de Bobinados Trifásicos Regulares Rev05 PDFDokument193 Seiten1 Calculo de Bobinados Trifásicos Regulares Rev05 PDFFERNÁNDEZ GÓMEZ GIANPIERRE CÉSARNoch keine Bewertungen
- Arranque de MotoresDokument46 SeitenArranque de MotoresPamela Sánchez RamosNoch keine Bewertungen
- Simulación de control escalar y vectorial FOC en máquina asíncronaDokument5 SeitenSimulación de control escalar y vectorial FOC en máquina asíncronaAlex UribeNoch keine Bewertungen
- Selección de Motores Asíncronos TrifásicosDokument64 SeitenSelección de Motores Asíncronos TrifásicosCésar MaravíNoch keine Bewertungen
- Manual de Entrenamiento Compressed 1Dokument126 SeitenManual de Entrenamiento Compressed 1Danny Isaías Vera Guerrero100% (1)
- Silabus ML202 2016Dokument2 SeitenSilabus ML202 2016Alex QuispeNoch keine Bewertungen
- Calculo de Corrientes de CortocircuitoDokument28 SeitenCalculo de Corrientes de CortocircuitoHeiner Farid Castillo AvellaNoch keine Bewertungen
- Avance de Arranque de MotoresDokument2 SeitenAvance de Arranque de MotoresDavid Omar Mateo LopezNoch keine Bewertungen
- Instalacion y Mantenimiento de Motores Electricos Trifasicos Modulo 10Dokument277 SeitenInstalacion y Mantenimiento de Motores Electricos Trifasicos Modulo 10jheffred1893% (58)
- PROYECTO Pasantias UwuDokument13 SeitenPROYECTO Pasantias UwuJose A. Valdivia SilvaNoch keine Bewertungen
- 3.D Micro, Mini y Grandes Centrales Hidro en Bolivia BMADokument27 Seiten3.D Micro, Mini y Grandes Centrales Hidro en Bolivia BMAFernando CespedesNoch keine Bewertungen
- Luis Castilla - Trabajo de Suficiencia Profesional - Titulo Profesional - 2019Dokument65 SeitenLuis Castilla - Trabajo de Suficiencia Profesional - Titulo Profesional - 2019leifrank bustamanteNoch keine Bewertungen
- Arranque de MotocompresoresDokument14 SeitenArranque de MotocompresoresCesar OrozcoNoch keine Bewertungen
- Banco Motor Y802Dokument35 SeitenBanco Motor Y802Juan MercadoNoch keine Bewertungen
- Martínez Pérez Pineda - ENSAYOS DE MÁQUINAS ELÉCTRICASDokument14 SeitenMartínez Pérez Pineda - ENSAYOS DE MÁQUINAS ELÉCTRICASruben osorioNoch keine Bewertungen
- Proyecto Calculo de Sist D BombeoDokument42 SeitenProyecto Calculo de Sist D BombeoMarco Antonio RMNoch keine Bewertungen
- Motores EspecialesDokument44 SeitenMotores EspecialesEnmanuel Concepcion RamirezNoch keine Bewertungen
- Automatización de Cuartos Fríos para AhorroDokument241 SeitenAutomatización de Cuartos Fríos para Ahorromiltonselva50% (2)
- Análisis provisión eléctrica sistema industrial molino El CholoDokument23 SeitenAnálisis provisión eléctrica sistema industrial molino El CholoAlejandro VenturoNoch keine Bewertungen
- Control de Maquinas Electricas I Notas PDokument146 SeitenControl de Maquinas Electricas I Notas PNelson GilNoch keine Bewertungen
- Motores de Corriente AlternaDokument7 SeitenMotores de Corriente AlternaPablo Andrés SanchezNoch keine Bewertungen