Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- On The Application of The Global Matched Filter toDOA Estimation With Uniform Circular ArraysDokument8 SeitenOn The Application of The Global Matched Filter toDOA Estimation With Uniform Circular ArraysMuhammad KhawarNoch keine Bewertungen
- An Efficient SDMA Scheme Applied in Hot Spots Using Uniform Circular ArrayDokument4 SeitenAn Efficient SDMA Scheme Applied in Hot Spots Using Uniform Circular ArrayMuhammad KhawarNoch keine Bewertungen
- Electronics Journal List (SCI) PDFDokument11 SeitenElectronics Journal List (SCI) PDFMuhammad KhawarNoch keine Bewertungen
- Wireless-Overview WCMC 2008Dokument24 SeitenWireless-Overview WCMC 2008Muhammad KhawarNoch keine Bewertungen
- 2018 Chinese Government Scholarship-Graduate Program at Lanzhou Jiaotong UniversityDokument10 Seiten2018 Chinese Government Scholarship-Graduate Program at Lanzhou Jiaotong UniversityMuhammad KhawarNoch keine Bewertungen
- Symptoms of Depression FINALDokument83 SeitenSymptoms of Depression FINALMuhammad KhawarNoch keine Bewertungen
- Covering Letter For Job ApplicationDokument2 SeitenCovering Letter For Job ApplicationMuhammad KhawarNoch keine Bewertungen
- Dubai Visit TipsDokument4 SeitenDubai Visit TipsMuhammad KhawarNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Moving Money Box: Pig (Assembly Instructions) : The Movements Work Better With Heavier CoinsDokument6 SeitenMoving Money Box: Pig (Assembly Instructions) : The Movements Work Better With Heavier CoinsjuanNoch keine Bewertungen
- Planet Earth: Its Propeties To Support LifeDokument27 SeitenPlanet Earth: Its Propeties To Support LifegillianeNoch keine Bewertungen
- HP Prodesk 400 G6 Microtower PC: Reliable and Ready Expansion For Your Growing BusinessDokument4 SeitenHP Prodesk 400 G6 Microtower PC: Reliable and Ready Expansion For Your Growing BusinessPằngPằngChiuChiuNoch keine Bewertungen
- JMO Solutions 2008Dokument4 SeitenJMO Solutions 2008ichkhuyNoch keine Bewertungen
- Shi Et Al-2019-Intensive Care MedicineDokument11 SeitenShi Et Al-2019-Intensive Care MedicineJavier BlancNoch keine Bewertungen
- Podar International School (Icse) Practice Sheet STD: IX Chapter 28: Distance FormulaDokument2 SeitenPodar International School (Icse) Practice Sheet STD: IX Chapter 28: Distance FormulaVanshika MehrotraNoch keine Bewertungen
- 0.6m (2ft) Low Profile Antennas Microwave Antenna SpecificationsDokument15 Seiten0.6m (2ft) Low Profile Antennas Microwave Antenna SpecificationsDarwin Lopez AcevedoNoch keine Bewertungen
- Versana Premier Transducer GuideDokument4 SeitenVersana Premier Transducer GuideDigo OtávioNoch keine Bewertungen
- Module 5: Safety and Health at Work: Participant's HandbookDokument24 SeitenModule 5: Safety and Health at Work: Participant's HandbookChristian Surio RamosNoch keine Bewertungen
- Industrial Training Report (Kapar Power Plant)Dokument40 SeitenIndustrial Training Report (Kapar Power Plant)Hakeemi Baseri100% (2)
- 300.91C - Fire Alarm System Pre-Test and Acceptance Test Checklist 3-27-14Dokument2 Seiten300.91C - Fire Alarm System Pre-Test and Acceptance Test Checklist 3-27-14mthuyaNoch keine Bewertungen
- Solid State Controller of Drives - ExperimentDokument37 SeitenSolid State Controller of Drives - ExperimentRakesh Singh LodhiNoch keine Bewertungen
- Caeneus and PoseidonDokument77 SeitenCaeneus and PoseidonSabrina CareyNoch keine Bewertungen
- Opti Turn Tu 2004 V ManualDokument80 SeitenOpti Turn Tu 2004 V ManualCharu NavneetNoch keine Bewertungen
- Research Papers On Climate Change Global WarmingDokument4 SeitenResearch Papers On Climate Change Global Warminggw1nm9nbNoch keine Bewertungen
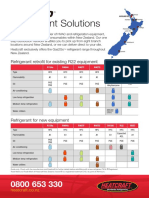
- Refrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentDokument2 SeitenRefrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentpriyoNoch keine Bewertungen
- Asme Code Qualification of Pipe Bends With Localized Wall Thinning PDFDokument8 SeitenAsme Code Qualification of Pipe Bends With Localized Wall Thinning PDFZhiqiang GuNoch keine Bewertungen
- P eDokument22 SeitenP eKiks AshNoch keine Bewertungen
- MS 005 For DUCT FABRICATION - INSULATION & INSTALLATION REV-1Dokument21 SeitenMS 005 For DUCT FABRICATION - INSULATION & INSTALLATION REV-1vusal huseynli100% (2)
- Dead Zone I Air AgeDokument7 SeitenDead Zone I Air AgeJaponec PicturesNoch keine Bewertungen
- Dumel James Melchor DuayDokument3 SeitenDumel James Melchor DuayBle DuayNoch keine Bewertungen
- Cot 3Dokument16 SeitenCot 3jaycel cynthiaNoch keine Bewertungen
- Rockwell Allen BradleyDokument73 SeitenRockwell Allen BradleymaygomezNoch keine Bewertungen
- User Instructions For WRC1021DDokument15 SeitenUser Instructions For WRC1021DjfcNoch keine Bewertungen
- MÁY 5 Service Manual Bellavista 1000 V16 08Dokument126 SeitenMÁY 5 Service Manual Bellavista 1000 V16 08Huế TrầnNoch keine Bewertungen
- Ashok Leyland Project ReportDokument40 SeitenAshok Leyland Project ReportGovind kumarNoch keine Bewertungen
- Rightship Ship Inspection Questionnaire RISQDokument177 SeitenRightship Ship Inspection Questionnaire RISQИгорь100% (3)
- BSO 04cDokument267 SeitenBSO 04cSamikshya BNoch keine Bewertungen
- Vanilla Farming: The Way Forward: July 2019Dokument6 SeitenVanilla Farming: The Way Forward: July 2019mituNoch keine Bewertungen
- Conversion Tables by Cafe Fernando Food BlogDokument5 SeitenConversion Tables by Cafe Fernando Food BlogElston FooNoch keine Bewertungen