Das könnte Ihnen auch gefallen
- ALTERA - In-System Programmability GuidelinesDokument18 SeitenALTERA - In-System Programmability GuidelinesRobert GuzmanNoch keine Bewertungen
- Protective Relays & SCADA Systems - SiemensDokument6 SeitenProtective Relays & SCADA Systems - SiemensGeorge CisnerosNoch keine Bewertungen
- Application of PLC For Elevator Control System: Saurabh Sharma T.Y.Ladakhi A.P.Tiwary Dr. B.B.Pradhan R.PhiponDokument4 SeitenApplication of PLC For Elevator Control System: Saurabh Sharma T.Y.Ladakhi A.P.Tiwary Dr. B.B.Pradhan R.PhiponMohammed SelmanNoch keine Bewertungen
- F0314802 Tapcon enDokument12 SeitenF0314802 Tapcon enroom liveNoch keine Bewertungen
- Tapcon F0314800 enDokument12 SeitenTapcon F0314800 enDeepak JosephNoch keine Bewertungen
- Bu34p02a00 71eDokument36 SeitenBu34p02a00 71e1meander23Noch keine Bewertungen
- General Specifications: ASTMAC Overview and Base Types NT105xJ, NT110xJ, NT120xJ, NT130xJ, and NT182AJ GS 34P02A03-01EDokument9 SeitenGeneral Specifications: ASTMAC Overview and Base Types NT105xJ, NT110xJ, NT120xJ, NT130xJ, and NT182AJ GS 34P02A03-01EHolicsNoch keine Bewertungen
- GE Industrial SystemsDokument20 SeitenGE Industrial Systemsfishzee100% (2)
- 1MRK511361-BEN A en Product Guide Bay Control REC670 2.1Dokument113 Seiten1MRK511361-BEN A en Product Guide Bay Control REC670 2.1Constantin PopescuNoch keine Bewertungen
- Haryana Vidyut Prasaran Nigam LTD.: Technical SpecificationDokument39 SeitenHaryana Vidyut Prasaran Nigam LTD.: Technical SpecificationLalitha BhavaniNoch keine Bewertungen
- Smart Factory FlyerDokument20 SeitenSmart Factory FlyerMario OliveraNoch keine Bewertungen
- 1MRK511404-BEN A en Product Guide Bay Control REC670 Version 2.2Dokument138 Seiten1MRK511404-BEN A en Product Guide Bay Control REC670 Version 2.2Quang NguyenNoch keine Bewertungen
- Utility SCADA and Load Shedding Power Distribution System for NewmontDokument12 SeitenUtility SCADA and Load Shedding Power Distribution System for NewmontAlpha AgustinusNoch keine Bewertungen
- Automation System & Ac KioskDokument34 SeitenAutomation System & Ac Kiosksadfs232Noch keine Bewertungen
- 0305 0310 PDFDokument6 Seiten0305 0310 PDFFahim AkterNoch keine Bewertungen
- ABB E180 CatDokument24 SeitenABB E180 CatPALANI MNoch keine Bewertungen
- Speedtronic™ Mark Vi TMR: GE Industrial SystemsDokument19 SeitenSpeedtronic™ Mark Vi TMR: GE Industrial Systemsnboulegroune100% (1)
- MX Component Ver.4 - Programming Manual SH (NA) - 081085-G (04.15)Dokument586 SeitenMX Component Ver.4 - Programming Manual SH (NA) - 081085-G (04.15)ngoxuannghiaNoch keine Bewertungen
- Sicam Pas - 6Md90: Answers For EnergyDokument16 SeitenSicam Pas - 6Md90: Answers For EnergyEfrain OyarceNoch keine Bewertungen
- COMAP-IL-NT-Operator_guideDokument18 SeitenCOMAP-IL-NT-Operator_guideLuis LaproNoch keine Bewertungen
- Automation of Bottle Filling System in Industries Using PLC and ScadaDokument5 SeitenAutomation of Bottle Filling System in Industries Using PLC and ScadaVishwa DissanayakeNoch keine Bewertungen
- Fina SynopsisDokument10 SeitenFina SynopsisrinkkkuuNoch keine Bewertungen
- An 095Dokument11 SeitenAn 095tazzo2Noch keine Bewertungen
- IGW-VM Brochure 2022Dokument4 SeitenIGW-VM Brochure 2022Lâm Trần HữuNoch keine Bewertungen
- Case Study Autoclave AutomationDokument8 SeitenCase Study Autoclave AutomationÖZER YILDIRIMNoch keine Bewertungen
- Secure PLC Coding: Track Operating ModesDokument44 SeitenSecure PLC Coding: Track Operating ModesMigue FriasNoch keine Bewertungen
- Flexible and Powerful Delta AS Series PLC Controller for Automation EquipmentDokument44 SeitenFlexible and Powerful Delta AS Series PLC Controller for Automation EquipmentGabriel CantoNoch keine Bewertungen
- Ethernet Manual: How To Set Up An Ethernet NetworkDokument18 SeitenEthernet Manual: How To Set Up An Ethernet NetworkJayamuruganNoch keine Bewertungen
- 1MRK511404-BEN B en Product Guide Bay Control REC670 Version 2.2 PDFDokument143 Seiten1MRK511404-BEN B en Product Guide Bay Control REC670 Version 2.2 PDFJavier CuzcoNoch keine Bewertungen
- Temperature Sensor Interfacing With Embedded PLCDokument5 SeitenTemperature Sensor Interfacing With Embedded PLCInternational Journal of Application or Innovation in Engineering & ManagementNoch keine Bewertungen
- Knowledge Base Profinet Driver Vim2 v100Dokument21 SeitenKnowledge Base Profinet Driver Vim2 v100Robby NoviantoNoch keine Bewertungen
- S210e PDFDokument8 SeitenS210e PDFOlid Antonio Castillo PalmerosNoch keine Bewertungen
- DEH Control System TrainDokument14 SeitenDEH Control System Trainkarthick.gNoch keine Bewertungen
- PWM-Inverter Drive Control Operating With A Standard Personal ComputerDokument6 SeitenPWM-Inverter Drive Control Operating With A Standard Personal Computeralpha1ahNoch keine Bewertungen
- 3 CopalpDokument4 Seiten3 Copalpvgq47eplkyy8Noch keine Bewertungen
- Allen Bradley MCC ArchitectureDokument2 SeitenAllen Bradley MCC Architecturewvwinters100% (2)
- (PGA Substation Solution) FY45IPTT01 ADokument6 Seiten(PGA Substation Solution) FY45IPTT01 ANader DoolabiNoch keine Bewertungen
- Vanguard Product BrochureDokument6 SeitenVanguard Product BrochurescribdkhatnNoch keine Bewertungen
- RXT1200 e Manual D07-00-087P RevA00Dokument67 SeitenRXT1200 e Manual D07-00-087P RevA00roswind77Noch keine Bewertungen
- CX-Compolet With SYSMAC Gateway RuntimeDokument44 SeitenCX-Compolet With SYSMAC Gateway Runtimechew yee hengNoch keine Bewertungen
- Automation SystemDokument76 SeitenAutomation Systemsathya100% (2)
- SIMATIC NET Commissioning PC Stations - ManualDokument221 SeitenSIMATIC NET Commissioning PC Stations - ManualSam eagle goodNoch keine Bewertungen
- SAS Specification For KPCLDokument34 SeitenSAS Specification For KPCLMeghavahinaNoch keine Bewertungen
- Automation of Conveyor Using PLC PDFDokument4 SeitenAutomation of Conveyor Using PLC PDFchinnavenkateswarluNoch keine Bewertungen
- Logic Master 9070Dokument665 SeitenLogic Master 9070Silvia Del RioNoch keine Bewertungen
- DSA0034493Dokument4 SeitenDSA0034493chengchung liNoch keine Bewertungen
- 1MRK500016-BEN en PYRAMID Substation AutomationDokument16 Seiten1MRK500016-BEN en PYRAMID Substation Automationleonardo_melo_costaNoch keine Bewertungen
- Study of Micro C Os IIDokument4 SeitenStudy of Micro C Os IInilarabiNoch keine Bewertungen
- CENTUM VP System IntroductionDokument8 SeitenCENTUM VP System IntroductionKevin NgoNoch keine Bewertungen
- Dynalite Engineers SpecificationDokument19 SeitenDynalite Engineers SpecificationNATHANNoch keine Bewertungen
- Red 670Dokument137 SeitenRed 670firoj malikNoch keine Bewertungen
- Siprotec 6md85 ProfileDokument2 SeitenSiprotec 6md85 ProfileRajesh SawaleNoch keine Bewertungen
- SPPA-T1000 System OverviewDokument14 SeitenSPPA-T1000 System OverviewNAYEEMNoch keine Bewertungen
- Teleperm XP y Teleperm XS - ComunicaciónDokument12 SeitenTeleperm XP y Teleperm XS - Comunicaciónkerusacba_2011Noch keine Bewertungen
- Speedtronic™ Mark V: GE Industrial SystemsDokument14 SeitenSpeedtronic™ Mark V: GE Industrial SystemsJulio De la RosaNoch keine Bewertungen
- Woodward 03433 Flex500 Digital ControlDokument6 SeitenWoodward 03433 Flex500 Digital ControlabelsgNoch keine Bewertungen
- The Clever Easy Family Control, Visualization and NetworkingDokument32 SeitenThe Clever Easy Family Control, Visualization and NetworkingclaudioNoch keine Bewertungen
- Sicam PASDokument16 SeitenSicam PASRami El Naqa100% (1)
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusVon EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNoch keine Bewertungen
- TSHK0025Dokument1 SeiteTSHK0025Duy KhaNoch keine Bewertungen
- TSHK0351EDokument1 SeiteTSHK0351EThong ChanNoch keine Bewertungen
- Vehicle Speed Sensor Starter RelayDokument1 SeiteVehicle Speed Sensor Starter RelayThong ChanNoch keine Bewertungen
- Tsjj0175e PDFDokument1 SeiteTsjj0175e PDFThong ChanNoch keine Bewertungen
- Tshk0015e PDFDokument1 SeiteTshk0015e PDFThong ChanNoch keine Bewertungen
- Tsuz0002e PDFDokument1 SeiteTsuz0002e PDFThong ChanNoch keine Bewertungen
- Tswg0082e PDFDokument1 SeiteTswg0082e PDFThong ChanNoch keine Bewertungen
- TSJJ0172EDokument1 SeiteTSJJ0172EThong ChanNoch keine Bewertungen
- Optimizing engine performanceDokument1 SeiteOptimizing engine performanceThong ChanNoch keine Bewertungen
- TSUZ0002EDokument1 SeiteTSUZ0002EThong ChanNoch keine Bewertungen
- TSWG0082EDokument1 SeiteTSWG0082EThong ChanNoch keine Bewertungen
- TSUZ0083Dokument1 SeiteTSUZ0083Duy KhaNoch keine Bewertungen
- Key engine control components and sensorsDokument1 SeiteKey engine control components and sensorsThong ChanNoch keine Bewertungen
- TSUZ0006EDokument1 SeiteTSUZ0006EThong ChanNoch keine Bewertungen
- TSUZ0004EDokument1 SeiteTSUZ0004EThong ChanNoch keine Bewertungen
- Engine control module (ECM) wiring diagramDokument1 SeiteEngine control module (ECM) wiring diagramThong ChanNoch keine Bewertungen
- TSWG0035EDokument1 SeiteTSWG0035EDuy KhaNoch keine Bewertungen
- TSJJ0172EDokument1 SeiteTSJJ0172EThong ChanNoch keine Bewertungen
- Tsjj0181e PDFDokument1 SeiteTsjj0181e PDFThong ChanNoch keine Bewertungen
- TSHK0025Dokument1 SeiteTSHK0025Duy KhaNoch keine Bewertungen
- TSJJ0173EDokument1 SeiteTSJJ0173EThong ChanNoch keine Bewertungen
- Tsjj0179e PDFDokument1 SeiteTsjj0179e PDFThong ChanNoch keine Bewertungen
- TSJJ0174EDokument1 SeiteTSJJ0174EThong ChanNoch keine Bewertungen
- A A ON OFF Start ON OFF: Key SwitchDokument1 SeiteA A ON OFF Start ON OFF: Key SwitchThong ChanNoch keine Bewertungen
- TSJJ0173EDokument1 SeiteTSJJ0173EThong ChanNoch keine Bewertungen
- TSJJ0170EDokument1 SeiteTSJJ0170EThong ChanNoch keine Bewertungen
- Tsjj0175e PDFDokument1 SeiteTsjj0175e PDFThong ChanNoch keine Bewertungen
- Tsjj0169e PDFDokument1 SeiteTsjj0169e PDFThong ChanNoch keine Bewertungen
- Engine system component identificationDokument1 SeiteEngine system component identificationThong ChanNoch keine Bewertungen
- Engine system component diagramDokument1 SeiteEngine system component diagramThong ChanNoch keine Bewertungen
- Loading The Search BoxDokument24 SeitenLoading The Search Boxbhalaji1991Noch keine Bewertungen
- Pic Lab Ii Manual PDFDokument7 SeitenPic Lab Ii Manual PDFthanhvietnguyen100% (1)
- Automatic Water Pump Control Using 8051 MicrocontrollerDokument15 SeitenAutomatic Water Pump Control Using 8051 MicrocontrollersravaniNoch keine Bewertungen
- PD78 Series Microcontroller EEPROM Programmer User's Guide: Engineering Technical LaboratoryDokument14 SeitenPD78 Series Microcontroller EEPROM Programmer User's Guide: Engineering Technical LaboratoryUbaldo BritoNoch keine Bewertungen
- AT89S52Dokument3 SeitenAT89S52Gopi NadhNoch keine Bewertungen
- PIC24FJXXXGA0XX Flash Programming SpecificationDokument52 SeitenPIC24FJXXXGA0XX Flash Programming SpecificationSouhaila El MahjoubNoch keine Bewertungen
- CS3691 Embedded and Iot Lab ManualDokument128 SeitenCS3691 Embedded and Iot Lab Manualbalabasker33% (3)
- PLT 1001Dokument8 SeitenPLT 1001Vinayak SureshNoch keine Bewertungen
- Atmel Avr in System Programming - Plus - PROGRAMMERDokument9 SeitenAtmel Avr in System Programming - Plus - PROGRAMMERalphexxxNoch keine Bewertungen
- Catalogue of ProductsDokument49 SeitenCatalogue of ProductsKuldeep SinghNoch keine Bewertungen
- An Elnec en Isp Seep SpiDokument11 SeitenAn Elnec en Isp Seep SpiOsvaltronicoNoch keine Bewertungen
- PIC MicrocontrollerDokument21 SeitenPIC Microcontrollerdoddo16100% (2)
- TDA2002 10wDokument21 SeitenTDA2002 10wAlexandre S. CorrêaNoch keine Bewertungen
- REVELPROG-IS ManualDokument48 SeitenREVELPROG-IS ManualJuan Carlos De Leon CoradoNoch keine Bewertungen
- Microchip - In-Circuit Serial Programming GuideDokument264 SeitenMicrochip - In-Circuit Serial Programming GuideRichard Kammers100% (1)
- tl866 - Device - Support IcDokument12 Seitentl866 - Device - Support IcheokbwNoch keine Bewertungen
- Digispark Rev.3 ATTiny85 - ENDokument21 SeitenDigispark Rev.3 ATTiny85 - ENgamesreplysNoch keine Bewertungen
- Data SheetDokument6 SeitenData Sheetrujula shindeNoch keine Bewertungen
- Introduction To MicrocontrollerDokument27 SeitenIntroduction To Microcontrollerpcalver2000100% (1)
- PIC16F627Dokument6 SeitenPIC16F627kelyNoch keine Bewertungen
- Spi Kontrol VolumeeeeDokument4 SeitenSpi Kontrol VolumeeeeFaul HaqieNoch keine Bewertungen
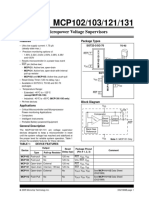
- Microchip MCP102T 315E - LB DatasheetDokument28 SeitenMicrochip MCP102T 315E - LB DatasheetSebastian ChaileNoch keine Bewertungen
- 016 GSM Based Digital Notice BoardDokument65 Seiten016 GSM Based Digital Notice BoardSuvarna LangadeNoch keine Bewertungen
- JDM ExtremeDokument4 SeitenJDM Extremegenio@3161Noch keine Bewertungen
- AT89C5131 USB BootloaderDokument33 SeitenAT89C5131 USB Bootloadercarlos augusto do carmo braiaNoch keine Bewertungen
- aPLUS AIVR MCU Voice OTP Family Features and SpecsDokument10 SeitenaPLUS AIVR MCU Voice OTP Family Features and SpecsMike ThomsonNoch keine Bewertungen
- Network Control Unit BoardDokument34 SeitenNetwork Control Unit BoardVineet Jain VaktawatNoch keine Bewertungen
- CasestudyDokument23 SeitenCasestudykrishchitraveniNoch keine Bewertungen
- Agrobot Automatically Irrigates FieldsDokument21 SeitenAgrobot Automatically Irrigates Fieldsharsh_1234Noch keine Bewertungen
- Understanding ICSP for PIC MicrocontrollersDokument9 SeitenUnderstanding ICSP for PIC MicrocontrollersKhubaib Ahmed100% (1)