Das könnte Ihnen auch gefallen
- T ESPE 019557 Proyecto MultiDokument191 SeitenT ESPE 019557 Proyecto MultisellavielNoch keine Bewertungen
- Aplicación de Fotogrametría Área en Levantamientos Topográficos Mediante El Uso de Vehiculos Aereos No Tripulados, Cantón La ManáDokument8 SeitenAplicación de Fotogrametría Área en Levantamientos Topográficos Mediante El Uso de Vehiculos Aereos No Tripulados, Cantón La ManáAlex IntriagoNoch keine Bewertungen
- PlanDokument42 SeitenPlanJessica RossNoch keine Bewertungen
- Generación de MDEs.Dokument8 SeitenGeneración de MDEs.Laury OchoaNoch keine Bewertungen
- Uso de Drones en Mineria SubterraneaDokument4 SeitenUso de Drones en Mineria SubterraneaYesz ImlNoch keine Bewertungen
- P1 - Laboratorio 3 - OJEDA - PILCODokument4 SeitenP1 - Laboratorio 3 - OJEDA - PILCOmatiasNoch keine Bewertungen
- Universidad San Francisco de Quito: Cesar Augusto Diaz CelisDokument140 SeitenUniversidad San Francisco de Quito: Cesar Augusto Diaz CelisJonathan CastroNoch keine Bewertungen
- Sistema SASIDDokument14 SeitenSistema SASIDLisardo Antonio Lezama RiosNoch keine Bewertungen
- Proyecto Casco Inteligente y SeguroDokument8 SeitenProyecto Casco Inteligente y SeguroYeisson Fabian Rojas VegaNoch keine Bewertungen
- Cansat RoverDokument16 SeitenCansat RoverJOSECARLOS RAMIREZ BREÑANoch keine Bewertungen
- Desarrollo de Prototipo de Quadrotor ConDokument18 SeitenDesarrollo de Prototipo de Quadrotor ConFuerzas Especiales100% (1)
- Aplicaciones de Los Drones en Lineas FerroviariasDokument20 SeitenAplicaciones de Los Drones en Lineas FerroviariasJuan Carlos Manuel Moreno Miranda100% (1)
- Ficha Articulos Set 2021-Magaly Yañacc SedanoDokument6 SeitenFicha Articulos Set 2021-Magaly Yañacc SedanoraquelNoch keine Bewertungen
- Gac If001 Formato de Postulacion de Ponencia o Poster Congreso 1Dokument10 SeitenGac If001 Formato de Postulacion de Ponencia o Poster Congreso 1JONATHAN STEVEN VARGAS CAÑONNoch keine Bewertungen
- Resumen Estructuras - Final - EspDokument3 SeitenResumen Estructuras - Final - EspMario Alberto Mendoza BárcenasNoch keine Bewertungen
- Diplomado en Post-Proceso LidarDokument3 SeitenDiplomado en Post-Proceso LidarAlejandro Del CastilloNoch keine Bewertungen
- Sistemas Del NextGenDokument14 SeitenSistemas Del NextGenAaronJ2902100% (1)
- 2021-11 - 25información General Del DiplomadoDokument8 Seiten2021-11 - 25información General Del DiplomadoSilvana SalicaNoch keine Bewertungen
- Informe BIM 282 AgostoDokument3 SeitenInforme BIM 282 AgostoRombosDeBrasilNoch keine Bewertungen
- 83 PDFDokument10 Seiten83 PDFMeri SangoquizaNoch keine Bewertungen
- Estado de Arte Del Uso de Drones y Sensores RemotosDokument11 SeitenEstado de Arte Del Uso de Drones y Sensores RemotosDiego Fabian RodriguezNoch keine Bewertungen
- Banda TransportadoraDokument16 SeitenBanda TransportadoraEd Abraham ReeyessNoch keine Bewertungen
- T Espe 014376Dokument149 SeitenT Espe 014376Jos Luis Moterroso CornejoNoch keine Bewertungen
- Deteccion de SismosDokument50 SeitenDeteccion de SismosJunior Orosco CasasNoch keine Bewertungen
- Diseño de Un Sistema Integrado para El Control de Dispositivos de Instrumentación Industrial y NavalDokument37 SeitenDiseño de Un Sistema Integrado para El Control de Dispositivos de Instrumentación Industrial y NavalJairo UparellaNoch keine Bewertungen
- Programación de Un Registrador de Datos Sismicos LABVIEW TESISDokument99 SeitenProgramación de Un Registrador de Datos Sismicos LABVIEW TESIScarlos.otiniano9811Noch keine Bewertungen
- Uso de Nanotecnología en La Industria AeronáuticaDokument12 SeitenUso de Nanotecnología en La Industria AeronáuticaThiagoLanzaniNoch keine Bewertungen
- Controlador PidDokument26 SeitenControlador PidElmer SanchezNoch keine Bewertungen
- Diseño de Un Prototipo de Movilizacion de SalvamentoDokument1 SeiteDiseño de Un Prototipo de Movilizacion de SalvamentoLaura AguilarNoch keine Bewertungen
- Udla Ec Tirt 2016 44 PDFDokument216 SeitenUdla Ec Tirt 2016 44 PDFPaola AndreaNoch keine Bewertungen
- Drones y El SPOTDokument18 SeitenDrones y El SPOTRosana Angelica Avalos ArguelloNoch keine Bewertungen
- PIA SISELA Caja NegraDokument4 SeitenPIA SISELA Caja NegraArmando MaldonadoNoch keine Bewertungen
- Trabajo de Investigacion FinalDokument23 SeitenTrabajo de Investigacion FinalElmer SanchezNoch keine Bewertungen
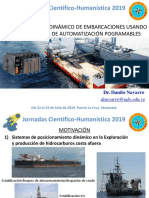
- Danilo Navarro - Sistemas de Posicionamiento Dinamico Usando PACDokument21 SeitenDanilo Navarro - Sistemas de Posicionamiento Dinamico Usando PACdanilonavNoch keine Bewertungen
- Resumen Garra 3 DedosDokument5 SeitenResumen Garra 3 DedosCristhian BuitragoNoch keine Bewertungen
- Formato Articulo Extenso - TanqueDeGuerraDokument2 SeitenFormato Articulo Extenso - TanqueDeGuerraUlises Román MurilloNoch keine Bewertungen
- Aplicaciones de La FotogrametríaDokument4 SeitenAplicaciones de La Fotogrametríakary.1494Noch keine Bewertungen
- Curso ArcSWAT 2021Dokument9 SeitenCurso ArcSWAT 2021Emiliano CondeNoch keine Bewertungen
- 93 708 1 PBDokument8 Seiten93 708 1 PBJuan MenesesNoch keine Bewertungen
- Diseño y Construcción de Un Cuadricoptero A Control RemotoDokument20 SeitenDiseño y Construcción de Un Cuadricoptero A Control RemotoGus Leyva0% (1)
- Obregon RMDokument100 SeitenObregon RMEstefany Picoy MiramiraNoch keine Bewertungen
- Drones Y Seguridad Nacional: Un Estudio MultidimensionalDokument474 SeitenDrones Y Seguridad Nacional: Un Estudio MultidimensionalLuis MejiaNoch keine Bewertungen
- Modulo de Instrumentación Virtual para Torres de Perforación PetroleraDokument25 SeitenModulo de Instrumentación Virtual para Torres de Perforación Petrolerajuan carlos vargas calderonNoch keine Bewertungen
- Presentación AutoridadDokument21 SeitenPresentación AutoridadLuis Felipe UribeNoch keine Bewertungen
- Drones MatiasDokument18 SeitenDrones Matiaspascal vallejosNoch keine Bewertungen
- Curso Sig Arcgis 10.3 MayoDokument11 SeitenCurso Sig Arcgis 10.3 MayoBravo Morales FrankNoch keine Bewertungen
- RADI 15 Desarrollo de Celdas Solares Basadas en Semiconductores CORREGIDODokument7 SeitenRADI 15 Desarrollo de Celdas Solares Basadas en Semiconductores CORREGIDOJose Luis LunaNoch keine Bewertungen
- Grupal Dron RTKDokument13 SeitenGrupal Dron RTKJaime Paguay SerpaNoch keine Bewertungen
- Documento Sin TítuloDokument9 SeitenDocumento Sin TítuloMARIA LUZ ARAUJO MALDONADONoch keine Bewertungen
- LM-PI-USVT-003-17-Desempeño y Durabilidad de La Demarcación Vial Horizontal en Costa RicaDokument117 SeitenLM-PI-USVT-003-17-Desempeño y Durabilidad de La Demarcación Vial Horizontal en Costa RicaEvert RiveraNoch keine Bewertungen
- Reingeniería y Acabados Del Vehículo Táctico Militar Scorpion 3Dokument25 SeitenReingeniería y Acabados Del Vehículo Táctico Militar Scorpion 3Diana ElizabethNoch keine Bewertungen
- DSM Actividad 2Dokument9 SeitenDSM Actividad 2deya6277Noch keine Bewertungen
- Drones Revolucionan Ejercicio Profesional Del Ingeniero TopógrafoDokument5 SeitenDrones Revolucionan Ejercicio Profesional Del Ingeniero TopógrafocanitoxxNoch keine Bewertungen
- Tesis 2Dokument27 SeitenTesis 2guidoNoch keine Bewertungen
- Perfil SegundosDokument11 SeitenPerfil SegundosemmoralesquinchiguangoNoch keine Bewertungen
- Proyecto Integrador ESPE 2018Dokument27 SeitenProyecto Integrador ESPE 2018Alejandro ReyesNoch keine Bewertungen
- Aplicación de La Ingenieria Topografica y Geodesica en La Instalacion de Plataformas Marinas 2014Dokument13 SeitenAplicación de La Ingenieria Topografica y Geodesica en La Instalacion de Plataformas Marinas 2014paulsurveyNoch keine Bewertungen
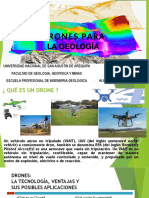
- Drones en La FotogeologiaDokument76 SeitenDrones en La FotogeologiaRIKI Q.T.Noch keine Bewertungen
- Sergio Damián Ríos Rabadán, José Alberto Ramírez AguilarDokument10 SeitenSergio Damián Ríos Rabadán, José Alberto Ramírez AguilarEmily Alejandra Ramírez RodríguezNoch keine Bewertungen
- Activación de un Laboratorio de Telecomunicaciones: Telecomunicaciones y Electrónica, #1Von EverandActivación de un Laboratorio de Telecomunicaciones: Telecomunicaciones y Electrónica, #1Noch keine Bewertungen
- Win AidDokument69 SeitenWin AidyvanNoch keine Bewertungen
- Digital 22881 PDFDokument106 SeitenDigital 22881 PDFyvanNoch keine Bewertungen
- Silabo Del CursoDokument8 SeitenSilabo Del CursoyvanNoch keine Bewertungen
- La Gran Hambruna Irlandesa de 1845Dokument15 SeitenLa Gran Hambruna Irlandesa de 1845yvanNoch keine Bewertungen
- Resumen de FundicionDokument12 SeitenResumen de Fundicionyvan100% (1)
- Nano CatalizadoresDokument6 SeitenNano CatalizadoresMiguel Llorente RamirezNoch keine Bewertungen
- Calcular El Promedio de Un Grupo de NúmerosDokument6 SeitenCalcular El Promedio de Un Grupo de NúmerosAnonymous qAOwt7dNoch keine Bewertungen
- TP N 3 - Higiene Industrial - Serrano Garcia Victor Hugo - Año 2022 - Profesor Victor Hugo AlfieriDokument22 SeitenTP N 3 - Higiene Industrial - Serrano Garcia Victor Hugo - Año 2022 - Profesor Victor Hugo AlfieriVictor SerranoNoch keine Bewertungen
- Tarea 4 MercantilDokument32 SeitenTarea 4 MercantilKevin CantillanoNoch keine Bewertungen
- Guia 16 Ingresos y GastosDokument11 SeitenGuia 16 Ingresos y GastosJennyfer BernalNoch keine Bewertungen
- Grados de LibertadDokument4 SeitenGrados de LibertadRuloeNoch keine Bewertungen
- Actividad Lluvia de IdeasDokument5 SeitenActividad Lluvia de IdeasJeimisitha GuthierrezNoch keine Bewertungen
- Actividad 2 Gestión EstratégicaDokument13 SeitenActividad 2 Gestión EstratégicaFrancisco NavarroNoch keine Bewertungen
- 07-Montaje Encendido ElectronicoDokument12 Seiten07-Montaje Encendido ElectronicoAbraham LbNoch keine Bewertungen
- Cimentaciones Superficiales: Criterios de Diseño CimentacionesDokument21 SeitenCimentaciones Superficiales: Criterios de Diseño CimentacionesJoseNoch keine Bewertungen
- Z RJ Yn WYe EiiaafyDokument53 SeitenZ RJ Yn WYe Eiiaafyal echalarNoch keine Bewertungen
- Ficha AmbientalDokument10 SeitenFicha AmbientalGunterRolandoNoch keine Bewertungen
- Cuadro Comparativo de Tipos de ContratoDokument7 SeitenCuadro Comparativo de Tipos de ContratoDaniela Lara DominguezNoch keine Bewertungen
- Tesis Grupo I (Administracion) - Fomentar El Uso de Epp Del Personal Obrero en La Sección Taller Que Permitan La Prevención de Accidentes en La Empresa Comol S.A.C.Dokument86 SeitenTesis Grupo I (Administracion) - Fomentar El Uso de Epp Del Personal Obrero en La Sección Taller Que Permitan La Prevención de Accidentes en La Empresa Comol S.A.C.SUSAN ESTEFANY BARRA CALLOAPAZANoch keine Bewertungen
- Ejercicio 3 y 4 WordDokument4 SeitenEjercicio 3 y 4 WordJorge Daniel AC100% (1)
- SelpeDokument6 SeitenSelpejuliancitomarNoch keine Bewertungen
- Habes CurpusDokument4 SeitenHabes CurpusMiguel Arana DiazNoch keine Bewertungen
- Final Comportamiento Del ConsumidorDokument3 SeitenFinal Comportamiento Del ConsumidorMartin YanchucNoch keine Bewertungen
- Programación EstructuradaDokument3 SeitenProgramación EstructuradaASISTENTE CONTABLENoch keine Bewertungen
- Tabla de Precios Referenciales - Región Del Bio Bio 2022 Con Zonificación.Dokument13 SeitenTabla de Precios Referenciales - Región Del Bio Bio 2022 Con Zonificación.EMPRESA CONSTRUCTORA R&JNoch keine Bewertungen
- BITACORA Del 12 Al 16 de Abril 2021Dokument2 SeitenBITACORA Del 12 Al 16 de Abril 2021Yasmin CardenasNoch keine Bewertungen
- Panel de Sectorización Ach: 80 MM de Espesor Con Núcleo de Lana de Roca de Alta Densidad (Tipo M)Dokument1 SeitePanel de Sectorización Ach: 80 MM de Espesor Con Núcleo de Lana de Roca de Alta Densidad (Tipo M)Adrian MuroNoch keine Bewertungen
- U1d1 - Preguntas de ControlDokument2 SeitenU1d1 - Preguntas de ControlXavier PitaNoch keine Bewertungen
- CONVERTIDOR DE PAR y SUSPENCION HIDRONEUMATICADokument4 SeitenCONVERTIDOR DE PAR y SUSPENCION HIDRONEUMATICAMiguel Angel Pino TiconaNoch keine Bewertungen
- Plan de Trabajo (2019-2024 - Bethania) - ContigoBethaniaDokument8 SeitenPlan de Trabajo (2019-2024 - Bethania) - ContigoBethaniaJCANoch keine Bewertungen
- Deber de Costos, Ejercicio 1Dokument185 SeitenDeber de Costos, Ejercicio 1TanyaRomeroNoch keine Bewertungen
- Investigación de La Metodología DMAICDokument5 SeitenInvestigación de La Metodología DMAICBrayan FigueroaNoch keine Bewertungen
- AMSA - Capacitacion Gestion de Inventarios v.1Dokument4 SeitenAMSA - Capacitacion Gestion de Inventarios v.1Luis Omar Shermann CuetoNoch keine Bewertungen
- Examen - Evaluacion FinalDokument10 SeitenExamen - Evaluacion FinalmilenaNoch keine Bewertungen
- Fallas de Recubrimientos - Octubre 2015Dokument235 SeitenFallas de Recubrimientos - Octubre 2015eduardo100% (4)