Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Design & Simulation SoftwaresDokument46 SeitenDesign & Simulation SoftwaresqamarVEX100% (3)
- Gamak MotorDokument34 SeitenGamak MotorCengiz Sezer100% (1)
- Immigrant Italian Stone CarversDokument56 SeitenImmigrant Italian Stone Carversglis7100% (2)
- Tuberculosis PowerpointDokument69 SeitenTuberculosis PowerpointCeline Villo100% (1)
- The FOA Reference For Fiber Optics - Fiber Optic TestingDokument19 SeitenThe FOA Reference For Fiber Optics - Fiber Optic TestingvsalaiselvamNoch keine Bewertungen
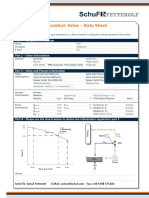
- Hydrodynamic Calculation Butterfly Valve (Double Disc)Dokument31 SeitenHydrodynamic Calculation Butterfly Valve (Double Disc)met-calcNoch keine Bewertungen
- NCP Orif Right Femur Post OpDokument2 SeitenNCP Orif Right Femur Post OpCen Janber CabrillosNoch keine Bewertungen
- Malvinas Gas Plant Operator Training: Paragon Engineering Services, Inc. Houston, TexasDokument71 SeitenMalvinas Gas Plant Operator Training: Paragon Engineering Services, Inc. Houston, TexasMary Cruz Meza CahuanaNoch keine Bewertungen
- United States Patent (19) 11 Patent Number: 6,058,893: Pate (45) Date of Patent: May 9, 2000Dokument8 SeitenUnited States Patent (19) 11 Patent Number: 6,058,893: Pate (45) Date of Patent: May 9, 2000qamarVEXNoch keine Bewertungen
- Automatic Recirculation Valve Inquiry FormDokument1 SeiteAutomatic Recirculation Valve Inquiry FormqamarVEXNoch keine Bewertungen
- United States Patent (10) Patent No.: Us 7.621,237 B2: Krowech Et Al. (45) Date of Patent: Nov. 24, 2009Dokument7 SeitenUnited States Patent (10) Patent No.: Us 7.621,237 B2: Krowech Et Al. (45) Date of Patent: Nov. 24, 2009qamarVEXNoch keine Bewertungen
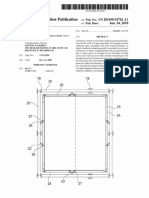
- Patent Application Publication (10) Pub. No.: US 2010/0154726A1Dokument12 SeitenPatent Application Publication (10) Pub. No.: US 2010/0154726A1qamarVEXNoch keine Bewertungen
- ARV Valve Broschuere V07 JT 13-04-2016.inddDokument1 SeiteARV Valve Broschuere V07 JT 13-04-2016.inddqamarVEXNoch keine Bewertungen
- Data SheetDokument4 SeitenData SheetqamarVEXNoch keine Bewertungen
- Gas Bill WorkingDokument2 SeitenGas Bill WorkingqamarVEXNoch keine Bewertungen
- Safety Climate in Scientific Laboratories in Engineering Universities of PakistanDokument2 SeitenSafety Climate in Scientific Laboratories in Engineering Universities of PakistanqamarVEXNoch keine Bewertungen
- BoilerDokument14 SeitenBoilerqamarVEXNoch keine Bewertungen
- Dynamic Behavior of Second Order Systems: Department of Chemical Engineering, U.E.T. Lahore PakistanDokument51 SeitenDynamic Behavior of Second Order Systems: Department of Chemical Engineering, U.E.T. Lahore PakistanqamarVEXNoch keine Bewertungen
- Lec#02 PDC - Design Aspects of A Process Control SystemDokument19 SeitenLec#02 PDC - Design Aspects of A Process Control SystemqamarVEXNoch keine Bewertungen
- Lec#03,04 PDC - Dynamic Behavior of First Order SystemsDokument24 SeitenLec#03,04 PDC - Dynamic Behavior of First Order SystemsqamarVEXNoch keine Bewertungen
- MTH100Dokument3 SeitenMTH100Syed Abdul Mussaver ShahNoch keine Bewertungen
- HCPL 316J 000eDokument34 SeitenHCPL 316J 000eElyes MbarekNoch keine Bewertungen
- Highway-And-Railroad-Engineering SummaryDokument15 SeitenHighway-And-Railroad-Engineering SummaryRodin James GabrilloNoch keine Bewertungen
- Scott 2001Dokument20 SeitenScott 2001Mariana CatiniNoch keine Bewertungen
- Schneider Pressure Switch XMLDokument2 SeitenSchneider Pressure Switch XMLhaoNoch keine Bewertungen
- Prestige Institute of Management & Research: Guided By:-Submitted By: - Prof. Arpit Loya Sumeet RattanDokument21 SeitenPrestige Institute of Management & Research: Guided By:-Submitted By: - Prof. Arpit Loya Sumeet RattanSumeet700005Noch keine Bewertungen
- Digging Deeper: Can Hot Air Provide Sustainable Source of Electricity?Dokument2 SeitenDigging Deeper: Can Hot Air Provide Sustainable Source of Electricity?Рустам ХаджаевNoch keine Bewertungen
- Anxiety Disorders - Causes, Types, Symptoms, & TreatmentsDokument5 SeitenAnxiety Disorders - Causes, Types, Symptoms, & Treatmentsrehaan662Noch keine Bewertungen
- DudjDokument4 SeitenDudjsyaiful rinantoNoch keine Bewertungen
- Middle Range Theory Ellen D. Schulzt: Modeling and Role Modeling Katharine Kolcaba: Comfort TheoryDokument22 SeitenMiddle Range Theory Ellen D. Schulzt: Modeling and Role Modeling Katharine Kolcaba: Comfort TheoryMerlinNoch keine Bewertungen
- The Indian Mining Sector: Effects On The Environment & FDI InflowsDokument10 SeitenThe Indian Mining Sector: Effects On The Environment & FDI InflowsMehul MandanakaNoch keine Bewertungen
- Nissan Copper LTDDokument11 SeitenNissan Copper LTDankit_shahNoch keine Bewertungen
- Biomedical Engineering Handbook Revised 5 2015Dokument37 SeitenBiomedical Engineering Handbook Revised 5 2015Teja GuttiNoch keine Bewertungen
- Assignment 2 Mat435Dokument2 SeitenAssignment 2 Mat435Arsene LupinNoch keine Bewertungen
- SP Essay 1Dokument14 SeitenSP Essay 1api-511870420Noch keine Bewertungen
- 4 Force & ExtensionDokument13 Seiten4 Force & ExtensionSelwah Hj AkipNoch keine Bewertungen
- Board Replacement CasesDokument41 SeitenBoard Replacement CasesNadeeshNoch keine Bewertungen
- AssessmentDokument3 SeitenAssessmentpalflaxNoch keine Bewertungen
- Lesson Plan in Science 9: I. ObjectivesDokument8 SeitenLesson Plan in Science 9: I. ObjectivesmarichuNoch keine Bewertungen
- IV. Network Modeling, Simple SystemDokument16 SeitenIV. Network Modeling, Simple SystemJaya BayuNoch keine Bewertungen
- Plastics and Polymer EngineeringDokument4 SeitenPlastics and Polymer Engineeringsuranjana26Noch keine Bewertungen
- Bible World History Timeline - 4004-3004BCDokument1 SeiteBible World History Timeline - 4004-3004BCSagitonette DadapNoch keine Bewertungen
- Astm C892 - 00Dokument5 SeitenAstm C892 - 00reneeNoch keine Bewertungen