Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- BS 7354Dokument63 SeitenBS 7354Abu Monsur Ali67% (3)
- Unit 1 Force Systems PDFDokument17 SeitenUnit 1 Force Systems PDFpeter vanderNoch keine Bewertungen
- E101 Lab Report Group 4Dokument8 SeitenE101 Lab Report Group 4Julia LovinoNoch keine Bewertungen
- Week 2 - Piping Friction Loss 1t 2022-2023Dokument113 SeitenWeek 2 - Piping Friction Loss 1t 2022-2023Mcoy DomingoNoch keine Bewertungen
- Flare Calc Sheet API RP 521Dokument9 SeitenFlare Calc Sheet API RP 521Clarence AG YueNoch keine Bewertungen
- Electric Motor TerminologyDokument26 SeitenElectric Motor TerminologyGeorge MarkasNoch keine Bewertungen
- QI 003 Dial GaugeDokument13 SeitenQI 003 Dial Gaugeipkm123Noch keine Bewertungen
- "View" "Slide Show.": Resources Chapter MenuDokument92 Seiten"View" "Slide Show.": Resources Chapter Menuelty TanNoch keine Bewertungen
- Chemistry The Molecular Science 5th Edition Moore Solutions Manual 1Dokument36 SeitenChemistry The Molecular Science 5th Edition Moore Solutions Manual 1josephandersonxqwbynfjzk100% (27)
- S5 16003PS0 NS0Dokument2 SeitenS5 16003PS0 NS0Antonio Solís MurilloNoch keine Bewertungen
- Performance Analysis of Multilevel Inverter Using Matlab/SimulinkDokument63 SeitenPerformance Analysis of Multilevel Inverter Using Matlab/Simulinkvinayak jith100% (1)
- Alokaya 1Dokument20 SeitenAlokaya 1joker boyNoch keine Bewertungen
- Assignment On 'Refrigeration Cycle'Dokument3 SeitenAssignment On 'Refrigeration Cycle'Anonymous GGtvR65MRNoch keine Bewertungen
- Energy Transfer in TurbomachinesDokument60 SeitenEnergy Transfer in TurbomachinesBasavaraja K M Kotyal83% (6)
- 2CDS211001R0324 sh201 c32Dokument4 Seiten2CDS211001R0324 sh201 c32Jean Luc FrancisNoch keine Bewertungen
- A Numerical Study of The Effects of Cell Formats On The Cycle Life of Lithium Ion BatteriesDokument10 SeitenA Numerical Study of The Effects of Cell Formats On The Cycle Life of Lithium Ion Batteriesleo934006Noch keine Bewertungen
- ABB-Motors and Generators TrainingDokument130 SeitenABB-Motors and Generators TrainingElafan100% (1)
- Math Seminar 2022Dokument9 SeitenMath Seminar 2022Joefoe JalandoniNoch keine Bewertungen
- 500L - MIXING TANK - N4-SMT-03 (MP1), N4-SMT-04 (MP2) - Ellipsoidal DishDokument8 Seiten500L - MIXING TANK - N4-SMT-03 (MP1), N4-SMT-04 (MP2) - Ellipsoidal Dishprakash KaleNoch keine Bewertungen
- Exercise 2Dokument7 SeitenExercise 2satrio weka0% (1)
- MATHS UNIT-2b - 15012019Dokument43 SeitenMATHS UNIT-2b - 15012019Susheel GuptaNoch keine Bewertungen
- Ground Fault Protection Expert Guide PDFDokument54 SeitenGround Fault Protection Expert Guide PDFClaudNoch keine Bewertungen
- Origin Have A Negative Y-Value, and Points Below A Positive Y-Value. We Have That, ForDokument4 SeitenOrigin Have A Negative Y-Value, and Points Below A Positive Y-Value. We Have That, ForVictor CoronelNoch keine Bewertungen
- Imaginary TimeDokument2 SeitenImaginary TimeSally MoremNoch keine Bewertungen
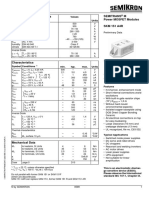
- Absolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RDokument5 SeitenAbsolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RChaovalit Jitsinthu100% (1)
- Inverting Power Supply Using A TPS54202 BuckDokument25 SeitenInverting Power Supply Using A TPS54202 Buckg4okkNoch keine Bewertungen
- Kicks and Gas MigrationDokument42 SeitenKicks and Gas MigrationJohnny Sanchez100% (1)
- FRICTIONDokument45 SeitenFRICTIONAllyn AntionNoch keine Bewertungen
- DC Motors: Ahmed M. T. Ibraheem AlnaibDokument18 SeitenDC Motors: Ahmed M. T. Ibraheem AlnaibsoraNoch keine Bewertungen
- MOSFET Selector Guide Definitions: Status DescriptionDokument84 SeitenMOSFET Selector Guide Definitions: Status DescriptionBanyugeaNoch keine Bewertungen