Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Cabinet clears 'AGNIPATH' recruitment scheme for Indian youth to serve short term in Armed ForcesDokument4 SeitenCabinet clears 'AGNIPATH' recruitment scheme for Indian youth to serve short term in Armed ForcesmanojNoch keine Bewertungen
- Exp1 PDFDokument13 SeitenExp1 PDFmanojNoch keine Bewertungen
- Sai Abhipsa Gochhayat: Understanding of Right To Abortion Under Indian ConstitutionDokument10 SeitenSai Abhipsa Gochhayat: Understanding of Right To Abortion Under Indian ConstitutionMalaisamy ANoch keine Bewertungen
- Li-Fi Seminar Project ReportDokument15 SeitenLi-Fi Seminar Project ReportSaurav Rai100% (7)
- Li-Fi Seminar Project ReportDokument15 SeitenLi-Fi Seminar Project ReportSaurav Rai100% (7)
- Student contact details spreadsheetDokument1 SeiteStudent contact details spreadsheetmanojNoch keine Bewertungen
- 2017 2018 Roving Calender Updated 19 1 2018Dokument10 Seiten2017 2018 Roving Calender Updated 19 1 2018manojNoch keine Bewertungen
- 1512 CircularDokument1 Seite1512 CircularmanojNoch keine Bewertungen
- B.Tech. Scheme Electrical2009-10 PDFDokument7 SeitenB.Tech. Scheme Electrical2009-10 PDFmanojNoch keine Bewertungen
- Aeromodelling Basics Dynamics PDFDokument20 SeitenAeromodelling Basics Dynamics PDFmanoj100% (1)
- Irjet V5i11127 PDFDokument3 SeitenIrjet V5i11127 PDFmanojNoch keine Bewertungen
- Sopaan Notices5Dokument4 SeitenSopaan Notices5manojNoch keine Bewertungen
- Maruti Interview Schedule by Stream & DateDokument2 SeitenMaruti Interview Schedule by Stream & DatemanojNoch keine Bewertungen
- Company Application FormDokument4 SeitenCompany Application FormmanojNoch keine Bewertungen
- Infosys Drive (RE) (Responses)Dokument4 SeitenInfosys Drive (RE) (Responses)manojNoch keine Bewertungen
- B.Tech 8th Sem May June 2015 ET 416 Data Communication NetworksDokument2 SeitenB.Tech 8th Sem May June 2015 ET 416 Data Communication NetworksmanojNoch keine Bewertungen
- Maruti Interview Schedule by Stream & DateDokument2 SeitenMaruti Interview Schedule by Stream & DatemanojNoch keine Bewertungen
- B.Tech. Scheme Electrical2009-10 PDFDokument7 SeitenB.Tech. Scheme Electrical2009-10 PDFmanojNoch keine Bewertungen
- PDFDokument1 SeitePDFmanojNoch keine Bewertungen
- Infosys Recruitment Drive (Responses)Dokument2 SeitenInfosys Recruitment Drive (Responses)manojNoch keine Bewertungen
- Academic Calendar EVEN SEMESTER 2019-20Dokument1 SeiteAcademic Calendar EVEN SEMESTER 2019-20manojNoch keine Bewertungen
- JD - Product Associate NIT KKRDokument2 SeitenJD - Product Associate NIT KKRmanojNoch keine Bewertungen
- Maruti ProfileDokument27 SeitenMaruti ProfilesunnyNoch keine Bewertungen
- Sai Abhipsa Gochhayat: Understanding of Right To Abortion Under Indian ConstitutionDokument10 SeitenSai Abhipsa Gochhayat: Understanding of Right To Abortion Under Indian ConstitutionMalaisamy ANoch keine Bewertungen
- Academic Calendar ODD SEMESTER 2019-20Dokument1 SeiteAcademic Calendar ODD SEMESTER 2019-20manojNoch keine Bewertungen
- ELECTRICAL Engineering Interview Questions With AnswersDokument16 SeitenELECTRICAL Engineering Interview Questions With AnswersAnonymous YuZX1Ot3Noch keine Bewertungen
- 07861124Dokument6 Seiten07861124manojNoch keine Bewertungen
- CmpsDokument12 SeitenCmpsmanojNoch keine Bewertungen
- Delhi MetroDokument8 SeitenDelhi MetroPriyanka Sharma100% (1)
- MAS-1 Charging, Starting and Ignition Systems PDFDokument25 SeitenMAS-1 Charging, Starting and Ignition Systems PDFmanojNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Catalogo Numatics 554SA400K046T30Dokument25 SeitenCatalogo Numatics 554SA400K046T30Jair Mata Cuenca100% (1)
- L Series - Operating Manual.0.8Dokument55 SeitenL Series - Operating Manual.0.8PaMe LiTaNoch keine Bewertungen
- 4.catalogue Mog-Cat-13-ExDokument11 Seiten4.catalogue Mog-Cat-13-ExNicolas GallegosNoch keine Bewertungen
- Jevi - Junction Boxes For Immersion Heaters - Technical Data SheetDokument2 SeitenJevi - Junction Boxes For Immersion Heaters - Technical Data SheetHasibKaabiNoch keine Bewertungen
- Jpole 2 MDokument7 SeitenJpole 2 MHusein ZolotićNoch keine Bewertungen
- Sanyo PLC Xe20Dokument2 SeitenSanyo PLC Xe20f41z786Noch keine Bewertungen
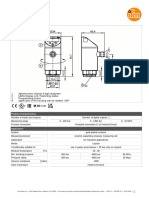
- PN7092 Pressure Sensor DisplayDokument5 SeitenPN7092 Pressure Sensor DisplayEslam YehiaNoch keine Bewertungen
- Lecture5 Chapter2 - Positive and Negative LogicDokument11 SeitenLecture5 Chapter2 - Positive and Negative LogicAyesha HussainNoch keine Bewertungen
- 300Mhz To 450Mhz Low-Power, Crystal-Based +10Dbm Ask/Fsk TransmitterDokument11 Seiten300Mhz To 450Mhz Low-Power, Crystal-Based +10Dbm Ask/Fsk TransmitterBlagoja GjakovskiNoch keine Bewertungen
- Att.1 QT1-L-G-020-05-00003, KKS Numbering SystemDokument85 SeitenAtt.1 QT1-L-G-020-05-00003, KKS Numbering SystemDoan Ngoc DucNoch keine Bewertungen
- Instructions For Continued Airworthiness Maintenance Manual Supplement Concorde Valve Regulated Lead-Acid Main BatteryDokument11 SeitenInstructions For Continued Airworthiness Maintenance Manual Supplement Concorde Valve Regulated Lead-Acid Main BatteryESAVENoch keine Bewertungen
- En User Guide Dell P2417HDokument13 SeitenEn User Guide Dell P2417Hsupriyo110Noch keine Bewertungen
- LA210P Pro Loudspeaker CE-LVD Test ReportDokument73 SeitenLA210P Pro Loudspeaker CE-LVD Test ReportJL EN CONCIERTONoch keine Bewertungen
- List of Parts RequiredDokument3 SeitenList of Parts RequiredRoberto PasicNoch keine Bewertungen
- Resetting To The Delivery State: SIMATIC S7-300 CPU 31xC and CPU 31x: InstallationDokument2 SeitenResetting To The Delivery State: SIMATIC S7-300 CPU 31xC and CPU 31x: InstallationHerry SusiloNoch keine Bewertungen
- Double-impeller electric pumps technical data sheetDokument9 SeitenDouble-impeller electric pumps technical data sheetNahuel AlthausNoch keine Bewertungen
- iGX440U: Werkstatt-Handbuch Manual de Taller Shop Manual Manuel D' AtelierDokument10 SeiteniGX440U: Werkstatt-Handbuch Manual de Taller Shop Manual Manuel D' AtelierAlbertoNoch keine Bewertungen
- 800xa Outline - IO Systems - S800 IODokument20 Seiten800xa Outline - IO Systems - S800 IOKourosh52Noch keine Bewertungen
- Schematic Circuits: Section C - ElectricsDokument1 SeiteSchematic Circuits: Section C - ElectricsIonut GrozaNoch keine Bewertungen
- Total StationDokument2 SeitenTotal StationrahoznawrozNoch keine Bewertungen
- CN391 - Single ESSP Interface Between Smart Payout and Hopper AssemblyDokument1 SeiteCN391 - Single ESSP Interface Between Smart Payout and Hopper AssemblyAymen CheffiNoch keine Bewertungen
- Battery DesulfatorsDokument4 SeitenBattery DesulfatorsAlex MaianoNoch keine Bewertungen
- Module 6 - Current Divider RuleDokument10 SeitenModule 6 - Current Divider RuleNoel Jr. CornelioNoch keine Bewertungen
- PMIC System HW-Validation EngineerDokument3 SeitenPMIC System HW-Validation EngineerSai KrishnaNoch keine Bewertungen
- Op-Amp Cookbook - Part 4: Electronic Rectifier CircuitsDokument18 SeitenOp-Amp Cookbook - Part 4: Electronic Rectifier Circuitsamit281276Noch keine Bewertungen
- PLL 2164Dokument24 SeitenPLL 2164Benjamín Varela UmbralNoch keine Bewertungen
- Electrical Resistance: Edexcel Igcse / Certificate in Physics 2-4Dokument21 SeitenElectrical Resistance: Edexcel Igcse / Certificate in Physics 2-4Sam JordanNoch keine Bewertungen
- ELX 121 - Digital Television MultiplexingDokument22 SeitenELX 121 - Digital Television MultiplexingClark Linogao FelisildaNoch keine Bewertungen
- Cat Digital Voltage Regulator Manual: Read/DownloadDokument2 SeitenCat Digital Voltage Regulator Manual: Read/DownloadBrian Jr Ruiz Alegre0% (1)