Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Electrical DrivesDokument14 SeitenElectrical DrivesshivamNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- IES OBJ Electrical Engineering 1997 Paper IIDokument16 SeitenIES OBJ Electrical Engineering 1997 Paper IIkamesh419kotaNoch keine Bewertungen
- Automatic Transformer Distribution-2974 PDFDokument6 SeitenAutomatic Transformer Distribution-2974 PDFAnandNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
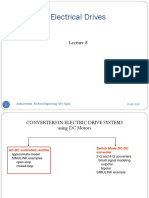
- Electrical Drives (DC Machine) : 16-09-2019 1 Anshul Awasthi, Electrical Engineering, UEC, UjjainDokument37 SeitenElectrical Drives (DC Machine) : 16-09-2019 1 Anshul Awasthi, Electrical Engineering, UEC, UjjainshivamNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Physics Project Session: 2022-23: "Electromagnetic Induction" "Electromagnetic Induction"Dokument14 SeitenPhysics Project Session: 2022-23: "Electromagnetic Induction" "Electromagnetic Induction"Sahil ChauhanNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Topic 5.3 - Electric CellsDokument29 SeitenTopic 5.3 - Electric CellsPaul AmezquitaNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Double Layer Peltier DeviceDokument2 SeitenDouble Layer Peltier DevicemunkarobertNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Physics ProjectDokument14 SeitenPhysics ProjectYuvan KumarNoch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- SyllabusDokument78 SeitenSyllabusRanjith PKNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Electricity Part 1 - 28Dokument84 SeitenElectricity Part 1 - 28nskprasad89Noch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- L14 - Electro-Magnetic InductionDokument12 SeitenL14 - Electro-Magnetic InductionAmartya MishraNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Physics XIIDokument168 SeitenPhysics XIIGaurav GuptaNoch keine Bewertungen
- Worksheet 6@HiLCoEDokument4 SeitenWorksheet 6@HiLCoEAbraham DamtewNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Ch7 Direct Current CircuitsDokument28 SeitenCh7 Direct Current Circuitsmehdii.heidary1366100% (2)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- PG Brochure 2014Dokument59 SeitenPG Brochure 2014ParinitaSahooNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Questions & Answers On Measurement of ResistanceDokument61 SeitenQuestions & Answers On Measurement of Resistancekibrom atsbha100% (3)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Calculus Based Physics 2 q1 Finals PDFDokument59 SeitenCalculus Based Physics 2 q1 Finals PDFNicoco LocoNoch keine Bewertungen
- Final Report - Electrochemistry Lab, JUDokument49 SeitenFinal Report - Electrochemistry Lab, JUChayon Mondal50% (2)
- Development of A Measuring Sensory System Based OnDokument10 SeitenDevelopment of A Measuring Sensory System Based OnNathanael Basana HisarNoch keine Bewertungen
- Potentiometric Titration of Cerium SolutionDokument4 SeitenPotentiometric Titration of Cerium SolutionValentin-AngeloUzunov100% (1)
- Questions and Answers EIMDokument7 SeitenQuestions and Answers EIMMark MarasiganNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
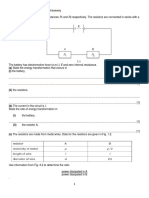
- Electricity A LevelDokument4 SeitenElectricity A LevelSajesh VallikkadanNoch keine Bewertungen
- Uce Physics Paper Two 3Dokument7 SeitenUce Physics Paper Two 3Okiror GeorgeNoch keine Bewertungen
- Circuit Elements: Unit 2Dokument3 SeitenCircuit Elements: Unit 2duy phanNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Physics Part-2 Complete Book Notes Theory PDFDokument72 SeitenPhysics Part-2 Complete Book Notes Theory PDFIzaz UmerkhelNoch keine Bewertungen
- THE Beginner'S Guide To Earthing: Brought To You byDokument23 SeitenTHE Beginner'S Guide To Earthing: Brought To You byPopescu AndreeaNoch keine Bewertungen
- Vacon NXP System Drive Hardware Manual DPD01365A UDokument72 SeitenVacon NXP System Drive Hardware Manual DPD01365A UTanuTiganu100% (3)
- 25 - Current, Resistance, and Electromotive Force - R K ParidaDokument11 Seiten25 - Current, Resistance, and Electromotive Force - R K ParidaMonicaNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Physics Investigatory Project: Pinaki Bandyopadhyay XII - C'Dokument20 SeitenPhysics Investigatory Project: Pinaki Bandyopadhyay XII - C'Vipin SinghaiNoch keine Bewertungen
- Magnetization Curve of DC Generator - Electrical4uDokument5 SeitenMagnetization Curve of DC Generator - Electrical4uM Kumar MarimuthuNoch keine Bewertungen
- 3 Point StarterDokument6 Seiten3 Point StartersuryavigneNoch keine Bewertungen
- AlternatorDokument27 SeitenAlternatorseikh_aiNoch keine Bewertungen
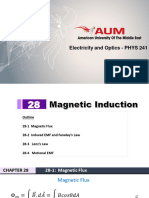
- Ch. 28 - Magnetic InductionDokument23 SeitenCh. 28 - Magnetic InductionShehab AshrafNoch keine Bewertungen
- Final Step-B BookletDokument72 SeitenFinal Step-B BookletHalfborn GundersonNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)