Das könnte Ihnen auch gefallen
- Microcontroller Based System For Control and Monitoring: Preyas.T. Shah, Ashish.R.PatelDokument5 SeitenMicrocontroller Based System For Control and Monitoring: Preyas.T. Shah, Ashish.R.PatelerpublicationNoch keine Bewertungen
- 51 52 03 31Dokument24 Seiten51 52 03 31raul lopezNoch keine Bewertungen
- Toshiba Integrated Control SystemDokument2 SeitenToshiba Integrated Control SystemKrishna VenkataramanNoch keine Bewertungen
- PC Toolkit Library AC800MDokument8 SeitenPC Toolkit Library AC800MmiguelNoch keine Bewertungen
- HCS-Series Catalogo 202009110245551896Dokument14 SeitenHCS-Series Catalogo 202009110245551896Sancudo SancudonNoch keine Bewertungen
- Services & Well Drilling: Site GroupDokument10 SeitenServices & Well Drilling: Site Grouphussam aldragmaNoch keine Bewertungen
- Haiwell PLC CatalogueDokument53 SeitenHaiwell PLC CatalogueDAFD4432Noch keine Bewertungen
- DCS & Industrial Communication Protocals & ConfigurationDokument10 SeitenDCS & Industrial Communication Protocals & ConfigurationAnbuselvamNoch keine Bewertungen
- Training Content - CiaeDokument15 SeitenTraining Content - CiaeJebas ManovaNoch keine Bewertungen
- Research Inventy: International Journal of Engineering and ScienceDokument5 SeitenResearch Inventy: International Journal of Engineering and ScienceresearchinventyNoch keine Bewertungen
- Micro800 PLC SystemsDokument16 SeitenMicro800 PLC SystemsNicolás A. SelvaggioNoch keine Bewertungen
- Harsh AlDokument81 SeitenHarsh AlSmit VahalkarNoch keine Bewertungen
- Irjet V5i3295 PDFDokument3 SeitenIrjet V5i3295 PDFchaitanya sNoch keine Bewertungen
- 8 Ways To Use A Digital Module in A CompactRIO SystemDokument6 Seiten8 Ways To Use A Digital Module in A CompactRIO SystemmafmonteNoch keine Bewertungen
- Labview Fpga Implementation of A Pid Controller For D.C. Motor Speed ControlDokument6 SeitenLabview Fpga Implementation of A Pid Controller For D.C. Motor Speed ControlZaheer AbbasNoch keine Bewertungen
- Programmable Logic Control Trainer IT-1200SDokument34 SeitenProgrammable Logic Control Trainer IT-1200SImran ShaukatNoch keine Bewertungen
- E560 IEC61850 SubDokument42 SeitenE560 IEC61850 SubHubert Maraza JaliriNoch keine Bewertungen
- 1 Introduction To Real-Time ControlDokument8 Seiten1 Introduction To Real-Time ControlraghavNoch keine Bewertungen
- Hc900 ControllerDokument19 SeitenHc900 ControllercarlosoalvarezcNoch keine Bewertungen
- R. V. College of Engineering, Bangalore Department of Electrical and Electronics EngineeringDokument12 SeitenR. V. College of Engineering, Bangalore Department of Electrical and Electronics EngineeringbalajigururajNoch keine Bewertungen
- Emerson DCS PresentationDokument25 SeitenEmerson DCS Presentationruchikaporwal2018Noch keine Bewertungen
- Digital PID ControllersDokument21 SeitenDigital PID Controllerssopan saNoch keine Bewertungen
- M800 CCW PDFDokument21 SeitenM800 CCW PDFAlaa RamadanNoch keine Bewertungen
- Micro830® Programmable Logic Controller: Bulletin 2080 Product ProfileDokument2 SeitenMicro830® Programmable Logic Controller: Bulletin 2080 Product ProfilezacriasNoch keine Bewertungen
- Haiwell PLC: Products CatalogueDokument69 SeitenHaiwell PLC: Products CataloguecristianNoch keine Bewertungen
- Simulink Model Controllers Ee371 Control Systems Tech NoteDokument3 SeitenSimulink Model Controllers Ee371 Control Systems Tech NoteShaheer DurraniNoch keine Bewertungen
- TheoryDokument42 SeitenTheoryEr. Piush JindalNoch keine Bewertungen
- B&R HMI Design and ProgramDokument32 SeitenB&R HMI Design and ProgramsmdsahinNoch keine Bewertungen
- Training Viva PPT 4 YrDokument23 SeitenTraining Viva PPT 4 YrAkanksha PatelNoch keine Bewertungen
- Prolific Systems & Technologies Pvt. LTD.Dokument77 SeitenProlific Systems & Technologies Pvt. LTD.Mystic AamirNoch keine Bewertungen
- Haiwell PLC CatalogueDokument62 SeitenHaiwell PLC CatalogueChristiaNdrés CarvajalNoch keine Bewertungen
- HC900 DataDokument24 SeitenHC900 DatamoisesNoch keine Bewertungen
- Haiwell PLC CatalogueDokument62 SeitenHaiwell PLC CataloguemykillerdroneNoch keine Bewertungen
- Integrated Control System: Prepared By: Guided By: Rajyaguru Maulik M. D.M. Patel (General Manage, Inst)Dokument31 SeitenIntegrated Control System: Prepared By: Guided By: Rajyaguru Maulik M. D.M. Patel (General Manage, Inst)Sunil PillaiNoch keine Bewertungen
- Industrial AutomationDokument16 SeitenIndustrial Automationvivek6681Noch keine Bewertungen
- Haiwell PLC CatalogueDokument61 SeitenHaiwell PLC CatalogueEmmy-HaiwellNoch keine Bewertungen
- Pesc 2004 1355766Dokument6 SeitenPesc 2004 1355766Pasha ZubkovNoch keine Bewertungen
- Mark Vi术语表Dokument9 SeitenMark Vi术语表meirangongNoch keine Bewertungen
- Programming Manual OptimusDrivePLCDokument577 SeitenProgramming Manual OptimusDrivePLCОлег ЕфимовNoch keine Bewertungen
- Micronet Safety Module (MSM) : Product Change Notification 06948Dokument4 SeitenMicronet Safety Module (MSM) : Product Change Notification 06948Wallace FerreiraNoch keine Bewertungen
- CAN Lab Exercise: Controller Area NetworkDokument21 SeitenCAN Lab Exercise: Controller Area NetworkCotfas PetruNoch keine Bewertungen
- HDL Lab Manual: Anandanagar, Bangalore-24Dokument81 SeitenHDL Lab Manual: Anandanagar, Bangalore-24Abinet ArbaNoch keine Bewertungen
- The Implementation of A Programmable Logic Controller For The Automation of The Belt ConveyorDokument4 SeitenThe Implementation of A Programmable Logic Controller For The Automation of The Belt ConveyorDĕĕpáķ ŚĥáŕmáNoch keine Bewertungen
- Relion Brochure PDFDokument4 SeitenRelion Brochure PDFSusan WilliamNoch keine Bewertungen
- PLC para CalderasDokument26 SeitenPLC para CalderasAndrés CóndorNoch keine Bewertungen
- Programmable Logic ControllerDokument31 SeitenProgrammable Logic ControllerRaj RajNoch keine Bewertungen
- 02-Wireless Low Cost Power Monitoring and Management SystemDokument50 Seiten02-Wireless Low Cost Power Monitoring and Management SystemAvetri VigneshwaranNoch keine Bewertungen
- Protechtps: Product Change Notification 06947Dokument4 SeitenProtechtps: Product Change Notification 06947Amit ParmarNoch keine Bewertungen
- Control Sysytems by SuklaDokument51 SeitenControl Sysytems by Suklavinay kumar MNoch keine Bewertungen
- Programable Logic ControllerDokument48 SeitenProgramable Logic ControllerNikeshraut100% (1)
- PLC QuestionsDokument17 SeitenPLC QuestionsbahyNoch keine Bewertungen
- HIO TouchScreenDokument4 SeitenHIO TouchScreenMaitry ShahNoch keine Bewertungen
- Home Automation Using PLC and ScadaDokument28 SeitenHome Automation Using PLC and Scada544D GamingNoch keine Bewertungen
- 2080 br001 - en PDokument12 Seiten2080 br001 - en PkubikNoch keine Bewertungen
- Micronet Safety Module (MSM) : Product Change Notification 06948Dokument4 SeitenMicronet Safety Module (MSM) : Product Change Notification 06948Amit ParmarNoch keine Bewertungen
- CIM Lecture Notes 10Dokument12 SeitenCIM Lecture Notes 10rzrasa100% (1)
- Intro To PLCDokument43 SeitenIntro To PLCNicholas SheltonNoch keine Bewertungen
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingVon EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingBewertung: 4 von 5 Sternen4/5 (1)
- 6582Dokument5 Seiten6582Brijesh SrivastavNoch keine Bewertungen
- Programmable Logic Controller - Allen BradleyDokument3 SeitenProgrammable Logic Controller - Allen BradleyBrijesh SrivastavNoch keine Bewertungen
- Electromagnetic Flowmeter: Installation and Operating InstructionsDokument80 SeitenElectromagnetic Flowmeter: Installation and Operating InstructionsavikbhaiNoch keine Bewertungen
- Electromagnetic Flowmeter: Installation and Operating InstructionsDokument80 SeitenElectromagnetic Flowmeter: Installation and Operating InstructionsavikbhaiNoch keine Bewertungen
- Electromagnetic Flowmeter: Installation and Operating InstructionsDokument80 SeitenElectromagnetic Flowmeter: Installation and Operating InstructionsavikbhaiNoch keine Bewertungen
- Electromagnetic Flowmeter: Installation and Operating InstructionsDokument80 SeitenElectromagnetic Flowmeter: Installation and Operating InstructionsavikbhaiNoch keine Bewertungen
- Pump Size Calculation 10 6 13Dokument90 SeitenPump Size Calculation 10 6 13Brijesh SrivastavNoch keine Bewertungen
- Technologies Used in Sugar Industry 1Dokument19 SeitenTechnologies Used in Sugar Industry 1Vinay KumarNoch keine Bewertungen
- Technologies Used in Sugar Industry 1Dokument19 SeitenTechnologies Used in Sugar Industry 1Vinay KumarNoch keine Bewertungen
- Pump Size Calculation 10 6 13Dokument90 SeitenPump Size Calculation 10 6 13Brijesh SrivastavNoch keine Bewertungen
- Electromagnetic Flowmeter: Installation and Operating InstructionsDokument80 SeitenElectromagnetic Flowmeter: Installation and Operating InstructionsavikbhaiNoch keine Bewertungen
- Boiler Control and Instruments - Magadi (Compatibility Mode)Dokument30 SeitenBoiler Control and Instruments - Magadi (Compatibility Mode)ArT MgMNoch keine Bewertungen
- Technologies Used in Sugar Industry 1Dokument19 SeitenTechnologies Used in Sugar Industry 1Vinay KumarNoch keine Bewertungen
- Pump Size Calculation 10 6 13Dokument90 SeitenPump Size Calculation 10 6 13Brijesh SrivastavNoch keine Bewertungen
- Product: HC900 Process Controller FAQ: Why Do I Get A Module Error With Analog Input?Dokument4 SeitenProduct: HC900 Process Controller FAQ: Why Do I Get A Module Error With Analog Input?Brijesh SrivastavNoch keine Bewertungen
- Pump Size Calculation 10 6 13Dokument90 SeitenPump Size Calculation 10 6 13Brijesh SrivastavNoch keine Bewertungen
- VfdcalculationDokument90 SeitenVfdcalculationBrijesh SrivastavNoch keine Bewertungen
- Pump Size Calculation 10 6 13Dokument90 SeitenPump Size Calculation 10 6 13Brijesh SrivastavNoch keine Bewertungen
- Pump Size Calculation 10 6 13Dokument90 SeitenPump Size Calculation 10 6 13Brijesh SrivastavNoch keine Bewertungen
- Pump Size Calculation 10 6 13Dokument90 SeitenPump Size Calculation 10 6 13Brijesh SrivastavNoch keine Bewertungen
- Programming of HC900 Controller Based Speed Control System For D.C. MotorDokument8 SeitenProgramming of HC900 Controller Based Speed Control System For D.C. MotorBrijesh SrivastavNoch keine Bewertungen
- MA IFC100 en 161010 4000041006 R06Dokument132 SeitenMA IFC100 en 161010 4000041006 R06MatoNoch keine Bewertungen
- Moisture Sensor For BaggaseDokument1 SeiteMoisture Sensor For BaggaseBrijesh SrivastavNoch keine Bewertungen
- Pump Size Calculation 10 6 13Dokument90 SeitenPump Size Calculation 10 6 13Brijesh SrivastavNoch keine Bewertungen
- Construction and Inspection Standard: IPS-C-IN-100Dokument36 SeitenConstruction and Inspection Standard: IPS-C-IN-100Brijesh SrivastavNoch keine Bewertungen
- Instrument Commissioning Checklist PDFDokument9 SeitenInstrument Commissioning Checklist PDFBrijesh Srivastav100% (1)
- Instrument Commissioning ChecklistDokument13 SeitenInstrument Commissioning Checklistrajeshkumarab100% (10)
- Equipment Calibration/Maintenance: APPENDIX D - USFWS QA Program (5/04)Dokument5 SeitenEquipment Calibration/Maintenance: APPENDIX D - USFWS QA Program (5/04)Defry Farhandinata100% (1)
- Loop Test Sheet PDFDokument1 SeiteLoop Test Sheet PDFTrí NguyễnNoch keine Bewertungen
- WWW Ranker Com List Best-Isekai-Manga-Recommendations Ranker-AnimeDokument8 SeitenWWW Ranker Com List Best-Isekai-Manga-Recommendations Ranker-AnimeDestiny EasonNoch keine Bewertungen
- Marking Scheme For Term 2 Trial Exam, STPM 2019 (Gbs Melaka) Section A (45 Marks)Dokument7 SeitenMarking Scheme For Term 2 Trial Exam, STPM 2019 (Gbs Melaka) Section A (45 Marks)Michelles JimNoch keine Bewertungen
- Ce-Series - TK60981-ML-18 IM - Rev - 0 - 05-13Dokument96 SeitenCe-Series - TK60981-ML-18 IM - Rev - 0 - 05-13VERDADE MUNDIAL GUERRANoch keine Bewertungen
- BPS C1: Compact All-Rounder in Banknote ProcessingDokument2 SeitenBPS C1: Compact All-Rounder in Banknote ProcessingMalik of ChakwalNoch keine Bewertungen
- Design ProjectDokument60 SeitenDesign Projectmahesh warNoch keine Bewertungen
- بتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Dokument5 Seitenبتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Batool MagedNoch keine Bewertungen
- 147 Amity Avenue Nampa, ID 81937 (999) 999-9999 William at Email - ComDokument4 Seiten147 Amity Avenue Nampa, ID 81937 (999) 999-9999 William at Email - ComjeyesbelmenNoch keine Bewertungen
- Chapter 2 HydrateDokument38 SeitenChapter 2 HydrateTaha Azab MouridNoch keine Bewertungen
- Calculating Free Energies Using Adaptive Biasing Force MethodDokument14 SeitenCalculating Free Energies Using Adaptive Biasing Force MethodAmin SagarNoch keine Bewertungen
- Peter Szekeres-Solutions To Problems of A Course in Modern Mathematical Physics - Groups, Hilbert Space and Differential Geometry PDFDokument382 SeitenPeter Szekeres-Solutions To Problems of A Course in Modern Mathematical Physics - Groups, Hilbert Space and Differential Geometry PDFMed Chouaybi0% (1)
- Arudha PDFDokument17 SeitenArudha PDFRakesh Singh100% (1)
- Pearson R CorrelationDokument2 SeitenPearson R CorrelationAira VillarinNoch keine Bewertungen
- Multiple Choice Practice Questions For Online/Omr AITT-2020 Instrument MechanicDokument58 SeitenMultiple Choice Practice Questions For Online/Omr AITT-2020 Instrument Mechanicمصطفى شاكر محمودNoch keine Bewertungen
- Passage To Abstract Mathematics 1st Edition Watkins Solutions ManualDokument25 SeitenPassage To Abstract Mathematics 1st Edition Watkins Solutions ManualMichaelWilliamscnot100% (50)
- Maximum and Minimum PDFDokument3 SeitenMaximum and Minimum PDFChai Usajai UsajaiNoch keine Bewertungen
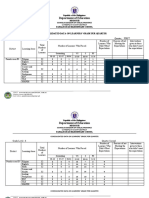
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDokument4 SeitenDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaNoch keine Bewertungen
- Job Satisfaction of Library Professionals in Maharashtra State, India Vs ASHA Job Satisfaction Scale: An Evaluative Study Dr. Suresh JangeDokument16 SeitenJob Satisfaction of Library Professionals in Maharashtra State, India Vs ASHA Job Satisfaction Scale: An Evaluative Study Dr. Suresh JangeNaveen KumarNoch keine Bewertungen
- ME-6501Computer Aided Design (CAD) WITH QB - BY Civildatas - Com 1Dokument85 SeitenME-6501Computer Aided Design (CAD) WITH QB - BY Civildatas - Com 1Nathar ShaNoch keine Bewertungen
- DTR Testastretta Valve Adjustment ProcedureDokument10 SeitenDTR Testastretta Valve Adjustment ProcedureTony LamprechtNoch keine Bewertungen
- How Transformers WorkDokument15 SeitenHow Transformers Worktim schroderNoch keine Bewertungen
- Sony x300 ManualDokument8 SeitenSony x300 ManualMarcosCanforaNoch keine Bewertungen
- Core CompetenciesDokument3 SeitenCore Competenciesapi-521620733Noch keine Bewertungen
- Load Chart Crane LiftingDokument25 SeitenLoad Chart Crane LiftingLauren'sclub EnglishBimbel Sd-sma100% (1)
- Swelab Alfa Plus User Manual V12Dokument100 SeitenSwelab Alfa Plus User Manual V12ERICKNoch keine Bewertungen
- Nominal GroupDokument3 SeitenNominal GroupSrourNoch keine Bewertungen
- TIA Guidelines SingaporeDokument24 SeitenTIA Guidelines SingaporeTahmidSaanidNoch keine Bewertungen
- I. Choose The Best Option (From A, B, C or D) To Complete Each Sentence: (3.0pts)Dokument5 SeitenI. Choose The Best Option (From A, B, C or D) To Complete Each Sentence: (3.0pts)thmeiz.17sNoch keine Bewertungen
- 4. Nguyễn Thị Minh Khai, Sóc TrăngDokument15 Seiten4. Nguyễn Thị Minh Khai, Sóc TrăngK60 TRẦN MINH QUANGNoch keine Bewertungen
- PTW Site Instruction NewDokument17 SeitenPTW Site Instruction NewAnonymous JtYvKt5XENoch keine Bewertungen
- FS-1040 FS-1060DN: Parts ListDokument23 SeitenFS-1040 FS-1060DN: Parts List1980cvvrNoch keine Bewertungen