Das könnte Ihnen auch gefallen
- Introduction To State Space AnalysisDokument63 SeitenIntroduction To State Space AnalysisTamrat Zewde100% (1)
- Chapter 8 ControlDokument96 SeitenChapter 8 ControlDESHMUKH ANKIT PRAKASHRAONoch keine Bewertungen
- Lecture 3 - 2Dokument42 SeitenLecture 3 - 2faruktokuslu16Noch keine Bewertungen
- Control Systems: Module: Modelling of SystemsDokument19 SeitenControl Systems: Module: Modelling of Systemsee210002004Noch keine Bewertungen
- Chapter - 2 - Mathematical Models of Systems - W2015Dokument75 SeitenChapter - 2 - Mathematical Models of Systems - W2015120200421003nNoch keine Bewertungen
- Linear Systems OverviewDokument49 SeitenLinear Systems OverviewAndré AraújoNoch keine Bewertungen
- Modern Control Theory State Space AnalysisDokument137 SeitenModern Control Theory State Space AnalysispragatinareshNoch keine Bewertungen
- CH 1Dokument12 SeitenCH 1Keneni AlemayehuNoch keine Bewertungen
- Control of Siso SystemsDokument64 SeitenControl of Siso SystemsAhmed QaziNoch keine Bewertungen
- Lecture 02 AV-356 System ModelingDokument28 SeitenLecture 02 AV-356 System ModelingUsama NazirNoch keine Bewertungen
- Petri NetsDokument122 SeitenPetri Netscreativechand100% (8)
- 6-Lecture 37 Time Domain AnalysisDokument17 Seiten6-Lecture 37 Time Domain AnalysisHamza KhanNoch keine Bewertungen
- Presentation On Laplace and Inverse Transform, TF and TD ModelingDokument20 SeitenPresentation On Laplace and Inverse Transform, TF and TD ModelingHassan RazaNoch keine Bewertungen
- Chapter 3 Modeling in The Time DomainDokument41 SeitenChapter 3 Modeling in The Time DomainRehan BasharatNoch keine Bewertungen
- Mathematical Modeling Using State SpaceDokument11 SeitenMathematical Modeling Using State Spacetarekegn utaNoch keine Bewertungen
- Introduction To State Space Analysis: UNIT-05Dokument62 SeitenIntroduction To State Space Analysis: UNIT-05MD SHAHRIARMAHMUDNoch keine Bewertungen
- State Variable Analysis - DRAFTDokument34 SeitenState Variable Analysis - DRAFTAl AidenNoch keine Bewertungen
- W EE 418 - Lecture 2 ModelingDokument20 SeitenW EE 418 - Lecture 2 ModelingGGAP LASTNoch keine Bewertungen
- Professor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaDokument120 SeitenProfessor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaAhmet KılıçNoch keine Bewertungen
- Lab3 2Dokument49 SeitenLab3 2علاء الدين العولقيNoch keine Bewertungen
- Unit-V - State Space AnalysisDokument18 SeitenUnit-V - State Space Analysisvenkkatesh57Noch keine Bewertungen
- EE-503 Linear System Theory OverviewDokument19 SeitenEE-503 Linear System Theory OverviewWaseem ChNoch keine Bewertungen
- Control Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiDokument23 SeitenControl Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiTalha JalilNoch keine Bewertungen
- Slide 2Dokument89 SeitenSlide 2EnesVSNoch keine Bewertungen
- B.advanced Automotive Intro2Dokument16 SeitenB.advanced Automotive Intro2Antoine RahalNoch keine Bewertungen
- GmailDokument24 SeitenGmailHriday SachdevNoch keine Bewertungen
- ELEG 3124 Signals and Systems LectureDokument39 SeitenELEG 3124 Signals and Systems LectureNgọc TrầnNoch keine Bewertungen
- Manual 2dDokument148 SeitenManual 2dRaja Reddy100% (2)
- Feedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsDokument30 SeitenFeedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsZaheer AhamedNoch keine Bewertungen
- EE5205 Control System DesignDokument44 SeitenEE5205 Control System DesignntbandaraNoch keine Bewertungen
- Lecture 24 Oscillations, Energy Methods, Power System StabilizersDokument38 SeitenLecture 24 Oscillations, Energy Methods, Power System StabilizersManuelNoch keine Bewertungen
- Control Systems Engineering Course OutcomesDokument73 SeitenControl Systems Engineering Course OutcomesARNI JAYACHANDRANoch keine Bewertungen
- Lec#19-24 - Laplace DomainDokument42 SeitenLec#19-24 - Laplace DomainDaniya AbbasiNoch keine Bewertungen
- Modeling Dynamic SystemsDokument45 SeitenModeling Dynamic Systemsyoussef hossamNoch keine Bewertungen
- CSE CDT28 Summary 6EEE1 BJK 2022-23UNIT-IVDokument3 SeitenCSE CDT28 Summary 6EEE1 BJK 2022-23UNIT-IVNadeem KhanNoch keine Bewertungen
- Lecture 1 Non Linear ControlDokument21 SeitenLecture 1 Non Linear ControlShivan BiradarNoch keine Bewertungen
- Systems and Models OverviewDokument21 SeitenSystems and Models Overviewhroark1Noch keine Bewertungen
- Mathematical Modeling in Control System: Sistem Kendali - 14S3211 Week 2 Session 1Dokument25 SeitenMathematical Modeling in Control System: Sistem Kendali - 14S3211 Week 2 Session 1mikhaelNoch keine Bewertungen
- Signals and System Lecture 1Dokument16 SeitenSignals and System Lecture 1Talha hayatNoch keine Bewertungen
- Lecture 2Dokument47 SeitenLecture 2Houssam moussaNoch keine Bewertungen
- Chapter - 5 - The Performance of Feedback Control Systems - W2015Dokument91 SeitenChapter - 5 - The Performance of Feedback Control Systems - W2015120200421003nNoch keine Bewertungen
- Modeling and Simulation: Variables and State EquationsDokument15 SeitenModeling and Simulation: Variables and State EquationsLatif KebbabiNoch keine Bewertungen
- 8 Control Basics PDFDokument79 Seiten8 Control Basics PDFshihabNoch keine Bewertungen
- Lecture-9 Modeling in Time DomainDokument39 SeitenLecture-9 Modeling in Time DomainMuneeb JawaidNoch keine Bewertungen
- Mechatronics Frequency Domain ModellingDokument54 SeitenMechatronics Frequency Domain ModellingAnonymous St1j35DR05Noch keine Bewertungen
- Lecture2 Chap2Dokument70 SeitenLecture2 Chap2aaisha abidNoch keine Bewertungen
- Control Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiDokument16 SeitenControl Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiTalha JalilNoch keine Bewertungen
- Control Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsDokument37 SeitenControl Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsSuyash Dahake VlogsNoch keine Bewertungen
- Unit-III-State Space Analysis in Discrete Time Control SystemDokument49 SeitenUnit-III-State Space Analysis in Discrete Time Control Systemkrushnasamy subramaniyan100% (2)
- Digital Control: Fundamentals: ENGI 7825: Control Systems II Andrew VardyDokument32 SeitenDigital Control: Fundamentals: ENGI 7825: Control Systems II Andrew VardyZhraa NorNoch keine Bewertungen
- LEC1Dokument84 SeitenLEC1RaihanNoch keine Bewertungen
- Mathematical Modeling of Electrical SystemsDokument24 SeitenMathematical Modeling of Electrical SystemsFahmeed Ali MeoNoch keine Bewertungen
- System Control: 1st Half of Semester Dept. of Mechanical EngineeringDokument94 SeitenSystem Control: 1st Half of Semester Dept. of Mechanical Engineeringفحرلرز دیمسNoch keine Bewertungen
- Easy ChairDokument6 SeitenEasy ChairclaudyaneNoch keine Bewertungen
- Control Technology: Department of Engineering TechnologyDokument55 SeitenControl Technology: Department of Engineering TechnologyTaha AmerNoch keine Bewertungen
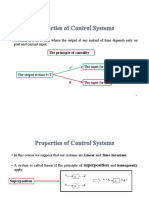
- A Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of CausalityDokument11 SeitenA Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of Causalitygamer manNoch keine Bewertungen
- Control Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsDokument35 SeitenControl Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsAdil KhanNoch keine Bewertungen
- Modeling Dynamic SystemsDokument48 SeitenModeling Dynamic SystemssepehrNoch keine Bewertungen
- Feedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsDokument29 SeitenFeedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsRomadhonFitriyantoNoch keine Bewertungen
- Nonlinear Control Feedback Linearization Sliding Mode ControlVon EverandNonlinear Control Feedback Linearization Sliding Mode ControlNoch keine Bewertungen
- Packing listIESDokument2 SeitenPacking listIESarjungangadharNoch keine Bewertungen
- Module Descriptions for Master's in Electrical Engineering and ITDokument34 SeitenModule Descriptions for Master's in Electrical Engineering and ITarjungangadharNoch keine Bewertungen
- Atomic Habits - 1 Hour Action Guide VFDokument26 SeitenAtomic Habits - 1 Hour Action Guide VFarjungangadharNoch keine Bewertungen
- Load Frequency and Voltage Regulation of a Turbo GeneratorDokument19 SeitenLoad Frequency and Voltage Regulation of a Turbo GeneratorarjungangadharNoch keine Bewertungen
- Solving The Time-Invariant State Equation: A T B T B B T XDokument40 SeitenSolving The Time-Invariant State Equation: A T B T B B T XarjungangadharNoch keine Bewertungen
- M1 Drives Ktunotes - in - PDFDokument25 SeitenM1 Drives Ktunotes - in - PDFarjungangadharNoch keine Bewertungen
- Satelite CommunicationDokument61 SeitenSatelite CommunicationDevaki V DeviNoch keine Bewertungen
- Packing List For GermanyDokument2 SeitenPacking List For GermanyarjungangadharNoch keine Bewertungen
- Analysis of Sampled Data SystemsDokument21 SeitenAnalysis of Sampled Data SystemsarjungangadharNoch keine Bewertungen
- ResultNotification B.techS5 (S) Jul19Dokument1 SeiteResultNotification B.techS5 (S) Jul19arjungangadharNoch keine Bewertungen
- Future Power Distribution Grids: Integration of Renewable Energy, Energy Storage, Electric Vehicles, Superconductor, and Magnetic BusDokument5 SeitenFuture Power Distribution Grids: Integration of Renewable Energy, Energy Storage, Electric Vehicles, Superconductor, and Magnetic BusarjungangadharNoch keine Bewertungen
- Ehv 1Dokument18 SeitenEhv 1shirishNoch keine Bewertungen
- Nonlinear PP T 2Dokument36 SeitenNonlinear PP T 2arjungangadharNoch keine Bewertungen
- Avaya Interaction Center Release 7.3 Database Designer Application ReferenceDokument252 SeitenAvaya Interaction Center Release 7.3 Database Designer Application ReferenceRodrigo MahonNoch keine Bewertungen
- ch1 v1Dokument22 Seitench1 v1LujainNoch keine Bewertungen
- Assembly Programming Journal - Issue 8Dokument59 SeitenAssembly Programming Journal - Issue 8lesutsNoch keine Bewertungen
- Retro Gaming With Raspberry PiDokument164 SeitenRetro Gaming With Raspberry PiadalbertoNoch keine Bewertungen
- 5102024-00A Relay Kit Workboat 11 1 MEDokument2 Seiten5102024-00A Relay Kit Workboat 11 1 MEPatrickNoch keine Bewertungen
- Epow KS10H KS20HDokument6 SeitenEpow KS10H KS20HstrahinjaNoch keine Bewertungen
- Lecture16 PDFDokument32 SeitenLecture16 PDFBaphelele MnisiNoch keine Bewertungen
- CEO/PresidentDokument2 SeitenCEO/PresidentAshwath IrkalNoch keine Bewertungen
- Svplnewmsme PDFDokument1 SeiteSvplnewmsme PDFSales SVPL100% (1)
- Fuzzy LogicDokument6 SeitenFuzzy Logicl_boy93Noch keine Bewertungen
- Non Valuated StockDokument4 SeitenNon Valuated StockGK SKNoch keine Bewertungen
- Lab 4Dokument3 SeitenLab 4game hackerNoch keine Bewertungen
- ICAC3N 22brochureDokument2 SeitenICAC3N 22brochureTapan ChowdhuryNoch keine Bewertungen
- Introduction to Servo MotorsDokument13 SeitenIntroduction to Servo MotorsReda FakihNoch keine Bewertungen
- Computer Monitor: From Wikipedia, The Free EncyclopediaDokument4 SeitenComputer Monitor: From Wikipedia, The Free EncyclopediaSock SackNoch keine Bewertungen
- CMOS Means Complementary MOS: NMOS and PMOS Working Together in A CircuitDokument8 SeitenCMOS Means Complementary MOS: NMOS and PMOS Working Together in A Circuitsuresht196Noch keine Bewertungen
- Latent Variable Models for Density EstimationDokument29 SeitenLatent Variable Models for Density EstimationAboutNoch keine Bewertungen
- Melaka SPM Trial 2010 Biology (W Ans) 1-3Dokument2 SeitenMelaka SPM Trial 2010 Biology (W Ans) 1-3Ana GoonNoch keine Bewertungen
- The Ultimate Scalper Course ManualDokument248 SeitenThe Ultimate Scalper Course ManualAspirant100% (5)
- Introduction To InformaticsDokument16 SeitenIntroduction To InformaticsBenjamin FlavianNoch keine Bewertungen
- Sepit - COB and MultithreadingDokument49 SeitenSepit - COB and MultithreadingNandanNoch keine Bewertungen
- Commeter D4141: Manual For UseDokument12 SeitenCommeter D4141: Manual For UsePrakash SharmaNoch keine Bewertungen
- Subnetting Class C IP AddDokument1 SeiteSubnetting Class C IP AddKeenly PasionNoch keine Bewertungen
- Intake Manifold For Boosted ApplicationDokument23 SeitenIntake Manifold For Boosted ApplicationKcCarsonNoch keine Bewertungen
- 1020-Amdocs Placement Paper - 2Dokument1 Seite1020-Amdocs Placement Paper - 2AdityakshkNoch keine Bewertungen
- Your Statement: Complete AccessDokument7 SeitenYour Statement: Complete AccessWeb TreamicsNoch keine Bewertungen
- Haiwell PLC Communication Address Code TableDokument1 SeiteHaiwell PLC Communication Address Code TableJuan Carlos CosmeNoch keine Bewertungen
- Skyscanner Tone of VoiceDokument32 SeitenSkyscanner Tone of VoiceJefferson Bobby OrtegaNoch keine Bewertungen
- Accessing VDIs and logging into NetScaler GatewayDokument7 SeitenAccessing VDIs and logging into NetScaler GatewayMohsin ModiNoch keine Bewertungen
- Piping DownloadsDokument11 SeitenPiping DownloadsAnkit ChughNoch keine Bewertungen