Das könnte Ihnen auch gefallen
- Electrical SubstationDokument221 SeitenElectrical SubstationMohammedSaadaniHassani91% (11)
- Fig. 4.10 Reactions at Supports and ConnectionsDokument1 SeiteFig. 4.10 Reactions at Supports and ConnectionsYash PagareNoch keine Bewertungen
- GearingBasic 02Dokument20 SeitenGearingBasic 02Jojee MarieNoch keine Bewertungen
- FrictionDokument6 SeitenFrictionJake BennettNoch keine Bewertungen
- SEMINAR PAPER ATTACK FORM 5 PHY MR HAZEEQ 20.07.2023 - Ameerul HazeeqDokument7 SeitenSEMINAR PAPER ATTACK FORM 5 PHY MR HAZEEQ 20.07.2023 - Ameerul HazeeqAina JannahNoch keine Bewertungen
- Laws of Motion - KS13 2021Dokument29 SeitenLaws of Motion - KS13 2021pullagalkNoch keine Bewertungen
- CVNG 2001 Structural MechanicsDokument9 SeitenCVNG 2001 Structural MechanicsKellesia WilliamsNoch keine Bewertungen
- ME211 Lecture Notes-31-41Dokument11 SeitenME211 Lecture Notes-31-41Sezin AYHANNoch keine Bewertungen
- Dynamics Chapter 02 Kinetics EquationDokument14 SeitenDynamics Chapter 02 Kinetics EquationMuhammad Danial Hakim Bin JohariNoch keine Bewertungen
- Machine Design Lecture NotesDokument25 SeitenMachine Design Lecture NotesFady KamilNoch keine Bewertungen
- 19 - HandPicked - Solids & FluidsDokument64 Seiten19 - HandPicked - Solids & Fluidsmuzik factoriNoch keine Bewertungen
- Retaining Structures: Sea WallDokument7 SeitenRetaining Structures: Sea WallMichael ChangNoch keine Bewertungen
- 1-FrictionDokument3 Seiten1-FrictionOwen RoldanNoch keine Bewertungen
- SBOC+Midterm+Review+NotesDokument12 SeitenSBOC+Midterm+Review+NotesReshamNoch keine Bewertungen
- ESE 568: Mixed Signal Design and Modeling Lecture Outline: Simplified For Hand AnalysisDokument13 SeitenESE 568: Mixed Signal Design and Modeling Lecture Outline: Simplified For Hand AnalysisVarun SinghalNoch keine Bewertungen
- Fuzz - Jpg.drawio (1) - CroppedDokument1 SeiteFuzz - Jpg.drawio (1) - CroppedthinkableofficialhandleNoch keine Bewertungen
- Note 08-Aug-2023Dokument4 SeitenNote 08-Aug-2023Taimoor EhsanNoch keine Bewertungen
- Correl 2 Lecture PDFDokument40 SeitenCorrel 2 Lecture PDFHarf Jucoy MirandaNoch keine Bewertungen
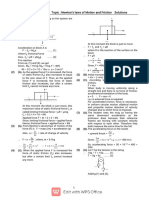
- Physics Newton's Laws of Motion and Friction SolutionsDokument3 SeitenPhysics Newton's Laws of Motion and Friction SolutionsEkendran RNoch keine Bewertungen
- Column Splice For Double - 20170522Dokument13 SeitenColumn Splice For Double - 20170522sundarNoch keine Bewertungen
- ST 8Dokument12 SeitenST 8yyNoch keine Bewertungen
- Solids & FluidsDokument11 SeitenSolids & Fluidsaadishjain988Noch keine Bewertungen
- IronMan PDFDokument8 SeitenIronMan PDFHilal Fadhlurrohman Afif100% (1)
- @TEAMFLOOD Mechanical Properties of Solids Aakash RM ModulesDokument24 Seiten@TEAMFLOOD Mechanical Properties of Solids Aakash RM ModulesVansh GuptaNoch keine Bewertungen
- N R P F W G: Direction of Impending MotionDokument28 SeitenN R P F W G: Direction of Impending MotionAbdullah Ahsan AhmedNoch keine Bewertungen
- Nota 19 May. 2017Dokument9 SeitenNota 19 May. 2017leonel cañari gonzalesNoch keine Bewertungen
- Session 4 Force Laws I 20 21Dokument46 SeitenSession 4 Force Laws I 20 21Luc AusterNoch keine Bewertungen
- Mechanical Properties of Metals: Dr. Azhar HussainDokument39 SeitenMechanical Properties of Metals: Dr. Azhar Hussainالف سے اسدNoch keine Bewertungen
- Force Analysis - Basic ConceptsDokument24 SeitenForce Analysis - Basic ConceptsTaylan KaraçelikNoch keine Bewertungen
- Cheat Sheet of PhysicsDokument6 SeitenCheat Sheet of Physicsaliayanraza5Noch keine Bewertungen
- Ees 12 El Ici I Wi 2010 Ees 512 - Electric Circuits - Winter 2010Dokument20 SeitenEes 12 El Ici I Wi 2010 Ees 512 - Electric Circuits - Winter 2010armon_domingoNoch keine Bewertungen
- Applications in Engineering Mechanics: Zero Force MembersDokument10 SeitenApplications in Engineering Mechanics: Zero Force MembersWolf Lord100% (1)
- Fatigue of WeldsDokument56 SeitenFatigue of WeldsRajeev RautNoch keine Bewertungen
- SYN Turning Effect of ForcesDokument16 SeitenSYN Turning Effect of Forceskjin8807Noch keine Bewertungen
- Figure 9Dokument1 SeiteFigure 9suryansh guptaNoch keine Bewertungen
- Deformation of SolidsDokument17 SeitenDeformation of SolidscrpNoch keine Bewertungen
- 02 - Simple Stresses and StrainsDokument40 Seiten02 - Simple Stresses and StrainsNattawat YingphongchaiNoch keine Bewertungen
- Work Energy Power RMDokument49 SeitenWork Energy Power RMakinaasirNoch keine Bewertungen
- Oscillations MindmapDokument1 SeiteOscillations Mindmapsarthakyedlawar04Noch keine Bewertungen
- Friction Part 1Dokument12 SeitenFriction Part 1Pra MNoch keine Bewertungen
- FE Analysis - 1 - LR - 2012Dokument41 SeitenFE Analysis - 1 - LR - 2012Pasquale CoppolaNoch keine Bewertungen
- ME2112 Strength of Materials (Victor ShimDokument14 SeitenME2112 Strength of Materials (Victor ShimdinodanoNoch keine Bewertungen
- Nota 07-10-2019 15 - 42 - 01 TDokument40 SeitenNota 07-10-2019 15 - 42 - 01 TMikeNoch keine Bewertungen
- Class #2: Structural Dynamics Equations of Motion Single Degree of Freedom Systems Free Vibrations DampedDokument43 SeitenClass #2: Structural Dynamics Equations of Motion Single Degree of Freedom Systems Free Vibrations DampedYesufNoch keine Bewertungen
- Analyzing Forces in Worm GearsDokument10 SeitenAnalyzing Forces in Worm GearsCybex EngineeringNoch keine Bewertungen
- Lecture 8 - Worm Gears PDFDokument10 SeitenLecture 8 - Worm Gears PDFRocky SunNoch keine Bewertungen
- Mechanical Science NotesDokument29 SeitenMechanical Science Notesaaronkanema36Noch keine Bewertungen
- Home Assignment: Material For: All Exams Section: Grammar Topic: Irregular VerbDokument2 SeitenHome Assignment: Material For: All Exams Section: Grammar Topic: Irregular VerbKaushik RanjanNoch keine Bewertungen
- 量物期中考前筆記Dokument48 Seiten量物期中考前筆記fishbear2003Noch keine Bewertungen
- Note 14 Feb BE 2566Dokument17 SeitenNote 14 Feb BE 2566austin0896805488Noch keine Bewertungen
- Mechanical Science NotesDokument29 SeitenMechanical Science NotesJohn OpiyoNoch keine Bewertungen
- LectureDokument8 SeitenLectureRyan ArcherNoch keine Bewertungen
- 20200414 meetingDokument34 Seiten20200414 meetingtj.lin1024Noch keine Bewertungen
- Wiper - Washer (Wiper and Washer Systems) - ALLDATA CollisionDokument2 SeitenWiper - Washer (Wiper and Washer Systems) - ALLDATA CollisionFelipe ZaldivarNoch keine Bewertungen
- Pro I Twin I: Any Wing or Near Back Set Ss & S Zone Out Te & FBDokument2 SeitenPro I Twin I: Any Wing or Near Back Set Ss & S Zone Out Te & FBWilliamNoch keine Bewertungen
- 1 Poster Fawad st112966Dokument1 Seite1 Poster Fawad st112966Mohammed Junaid ShaikhNoch keine Bewertungen
- NakloneĚŚnaĚ RovinaDokument2 SeitenNakloneĚŚnaĚ RovinaMineGnomek9Noch keine Bewertungen
- Module21 - Consequence Analysis - DispersionDokument35 SeitenModule21 - Consequence Analysis - DispersionMinh ThưNoch keine Bewertungen
- Force AnalysisDokument41 SeitenForce Analysiskürşat babulNoch keine Bewertungen
- Report of Mechanics of Machines 1Dokument12 SeitenReport of Mechanics of Machines 1muhammaduzairNoch keine Bewertungen
- Earthing Conductor Sizing CalculationsDokument17 SeitenEarthing Conductor Sizing CalculationsMohan BabuNoch keine Bewertungen
- Understanding and Optimizing Emc in S MpsDokument19 SeitenUnderstanding and Optimizing Emc in S MpsAris Sid AhmedNoch keine Bewertungen
- Circuitpages Light Dark Activated RelayDokument14 SeitenCircuitpages Light Dark Activated Relayalexwongks6118Noch keine Bewertungen
- Ch23 (Young-Freedman) Parte 2Dokument19 SeitenCh23 (Young-Freedman) Parte 2JorgeCortezNoch keine Bewertungen
- CentrifugationDokument23 SeitenCentrifugationBiswajit BeheraNoch keine Bewertungen
- Esm15 16Dokument3 SeitenEsm15 16khaja mohiddienNoch keine Bewertungen
- Catalogue Samwha CapacitorDokument68 SeitenCatalogue Samwha CapacitorAnu MaliNoch keine Bewertungen
- DUT HV Engineering Practical on Partial Discharge SimulationDokument3 SeitenDUT HV Engineering Practical on Partial Discharge SimulationSibongiseni MasondoNoch keine Bewertungen
- Basic Electricity: Continuing Education Professional Development CourseDokument298 SeitenBasic Electricity: Continuing Education Professional Development CourseankitNoch keine Bewertungen
- Shan Armaine Cabela - Week 1 - Electromagnetism LAS ODL and BDLDokument3 SeitenShan Armaine Cabela - Week 1 - Electromagnetism LAS ODL and BDLShan Armaine CabelaNoch keine Bewertungen
- Lab Exercise No. 2 Diode Curves: RocedureDokument4 SeitenLab Exercise No. 2 Diode Curves: RocedureJep JepNoch keine Bewertungen
- Engineering A Solution To The Problem of Dry-Band Arcing On ADSS CablesDokument27 SeitenEngineering A Solution To The Problem of Dry-Band Arcing On ADSS Cablesrjk941-1Noch keine Bewertungen
- Experimental Study On Progressive Collapse-Resistant Behavior of Reinforced Concrete Frame StructuresDokument7 SeitenExperimental Study On Progressive Collapse-Resistant Behavior of Reinforced Concrete Frame Structureshector rodriguezNoch keine Bewertungen
- Chapter 5 - TheveninDokument9 SeitenChapter 5 - TheveninLin ChongNoch keine Bewertungen
- Chapter Two Class 9thDokument18 SeitenChapter Two Class 9thAliNoch keine Bewertungen
- Equipotential Surfaces and CapacitorsDokument6 SeitenEquipotential Surfaces and CapacitorsMoid Aretaño MesaNoch keine Bewertungen
- Deformation NotesDokument6 SeitenDeformation NotesAtif NaseemNoch keine Bewertungen
- SIP PhysicsDokument8 SeitenSIP PhysicsPrincess Joy SamoragaNoch keine Bewertungen
- LSA44.3 ManualDokument24 SeitenLSA44.3 ManualDaniel ArdilaNoch keine Bewertungen
- Multifunction Electric Testers: V7Hvwhu'Hvfulswlrq) Urqw9Lhz6Hh) LjxuhDokument2 SeitenMultifunction Electric Testers: V7Hvwhu'Hvfulswlrq) Urqw9Lhz6Hh) Ljxuhrov1976Noch keine Bewertungen
- Science 7 Module 7 3RD QuarterDokument15 SeitenScience 7 Module 7 3RD QuarterSarah DarriguezNoch keine Bewertungen
- Curie Point of Ferromagnets: Yaakov KraftmakherDokument5 SeitenCurie Point of Ferromagnets: Yaakov KraftmakherNicky KumariNoch keine Bewertungen
- Ac Machine WindingsDokument12 SeitenAc Machine Windingsabenet bekele100% (2)
- TAMU Pump Rotordynamics Tutorial 2020Dokument28 SeitenTAMU Pump Rotordynamics Tutorial 2020Andrey ZagorulkoNoch keine Bewertungen
- Physics II Problems PDFDokument1 SeitePhysics II Problems PDFBOSS BOSSNoch keine Bewertungen
- Vikas SharmaSGT Lab ManualDokument18 SeitenVikas SharmaSGT Lab ManualAnand Mittal33% (3)
- Ogarte - Science 8 - DLL - Q1 - W1Dokument8 SeitenOgarte - Science 8 - DLL - Q1 - W1Charmalou Pampilo OgarteNoch keine Bewertungen
- Réle Temporizador - 3RP1574-1NP30Dokument7 SeitenRéle Temporizador - 3RP1574-1NP30jorge garciaNoch keine Bewertungen