Das könnte Ihnen auch gefallen
- ABS - Guidance Notes On Spectral-Based Fatigue Analysis For Floating Production, Storage and Offloading (Fpso) Systems 2002Dokument34 SeitenABS - Guidance Notes On Spectral-Based Fatigue Analysis For Floating Production, Storage and Offloading (Fpso) Systems 2002danieloq1Noch keine Bewertungen
- Mathcad - InPEX Masela FLNG Korea-Batam (Calm)Dokument5 SeitenMathcad - InPEX Masela FLNG Korea-Batam (Calm)fahmyits100% (1)
- Cost-Saving Offshore Wind Transition Piece DesignDokument11 SeitenCost-Saving Offshore Wind Transition Piece DesignWangwen ZhaoNoch keine Bewertungen
- Mooring OverviewDokument36 SeitenMooring OverviewRAUL GALDONoch keine Bewertungen
- DNVGL-ST-N002 - Site Specific Assessment of Mobile Offshore Units MWS - 2016 - 06Dokument58 SeitenDNVGL-ST-N002 - Site Specific Assessment of Mobile Offshore Units MWS - 2016 - 06Mircea PavelNoch keine Bewertungen
- Condições Climáticas Bacia de CamposDokument85 SeitenCondições Climáticas Bacia de CamposÍcaro ReisNoch keine Bewertungen
- Boatlanding and Riser Protecter Design-3Dokument16 SeitenBoatlanding and Riser Protecter Design-3samiransmitaNoch keine Bewertungen
- The Dynamics of Mooring Systems PDFDokument141 SeitenThe Dynamics of Mooring Systems PDFMirsoNoch keine Bewertungen
- Environmental CriteriaDokument22 SeitenEnvironmental CriteriaAji A7xNoch keine Bewertungen
- Collapse Analysis 1Dokument13 SeitenCollapse Analysis 1samiransmitaNoch keine Bewertungen
- DNV-OS-C102 Structural Design of Offshore Ships-2011-04Dokument64 SeitenDNV-OS-C102 Structural Design of Offshore Ships-2011-04hossinmaaNoch keine Bewertungen
- Analysis of offshore jacket platform responsesDokument8 SeitenAnalysis of offshore jacket platform responsesrobert.johns1028Noch keine Bewertungen
- Balmoral Group HandbookDokument172 SeitenBalmoral Group HandbookneelcorNoch keine Bewertungen
- CGN Huizhou Offshore Wind Farm Project Offshore Wind Power Mingyang 6.25MW Wind Turbine Split Installation (Hailongxingye) Special Construction PlanDokument206 SeitenCGN Huizhou Offshore Wind Farm Project Offshore Wind Power Mingyang 6.25MW Wind Turbine Split Installation (Hailongxingye) Special Construction PlanHieu Do TatNoch keine Bewertungen
- (DNV) Det Norske Veritas - 2005 - Material Risk - Ageing Offshore InstallationsDokument66 Seiten(DNV) Det Norske Veritas - 2005 - Material Risk - Ageing Offshore InstallationsKaroline Neumann100% (1)
- Platform in-place strength analysis of offshore structureDokument1.105 SeitenPlatform in-place strength analysis of offshore structureSadok KzadriNoch keine Bewertungen
- Buzzard Field Development Structural Computer ModelDokument63 SeitenBuzzard Field Development Structural Computer ModelneelcorNoch keine Bewertungen
- Mooring Analysis of A Subsea Pipelay Barge: Kamal Singh Yadav, Savin Viswanathan, Arunprasath PDokument12 SeitenMooring Analysis of A Subsea Pipelay Barge: Kamal Singh Yadav, Savin Viswanathan, Arunprasath PaaNoch keine Bewertungen
- DNV Os C102Dokument133 SeitenDNV Os C102Wilson Barreta JuniorNoch keine Bewertungen
- 6.offshore ConceptsDokument0 Seiten6.offshore Conceptshaidar1992Noch keine Bewertungen
- 1101 Semi Float Vessel PosterDokument1 Seite1101 Semi Float Vessel PosterYash SinghNoch keine Bewertungen
- DNV-RP-A202 Documentation of Offshore Projects.Dokument12 SeitenDNV-RP-A202 Documentation of Offshore Projects.leeNoch keine Bewertungen
- Installation of Steel and Flexible Pipelines in Sideway CurrentDokument144 SeitenInstallation of Steel and Flexible Pipelines in Sideway CurrentJohari A. KasimNoch keine Bewertungen
- Materials For JointsDokument25 SeitenMaterials For JointseNoch keine Bewertungen
- Installation of Anchors For Mooring System of Floating Wind TurbinesDokument134 SeitenInstallation of Anchors For Mooring System of Floating Wind Turbines정재영100% (1)
- Case Studies For Evaluating Hydrodynamic Motion Responses Using MOSESDokument26 SeitenCase Studies For Evaluating Hydrodynamic Motion Responses Using MOSESATLURI SATYA SRINIVAS oe13m002Noch keine Bewertungen
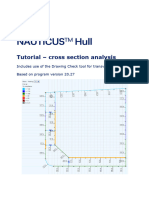
- NauticusHullv20 Tutorial CSRH-TankDokument118 SeitenNauticusHullv20 Tutorial CSRH-Tankchldudwo2158Noch keine Bewertungen
- Wave Loads On Small BodiesDokument31 SeitenWave Loads On Small BodiesannamkeerthiNoch keine Bewertungen
- 5 Supplimetary Information ReportDokument39 Seiten5 Supplimetary Information ReportANIL KUMARNoch keine Bewertungen
- Suction anchor installation and failure modesDokument12 SeitenSuction anchor installation and failure modesgamidi67Noch keine Bewertungen
- Collapse AnalysisDokument27 SeitenCollapse AnalysisLaxmi StrulNoch keine Bewertungen
- Check List For Topside Inplace Analysis: Project Client Model File NameDokument1 SeiteCheck List For Topside Inplace Analysis: Project Client Model File NameRamesh SelvarajNoch keine Bewertungen
- FRONT END ENGINEERING DESIGN - PART II SPECIFICATIONDokument41 SeitenFRONT END ENGINEERING DESIGN - PART II SPECIFICATIONMohd. Fadhil JamirinNoch keine Bewertungen
- PHD Thesis Pepijn de Jong - FinalDokument280 SeitenPHD Thesis Pepijn de Jong - FinalsiswoutNoch keine Bewertungen
- A01 Catenary and Wave SystemsDokument14 SeitenA01 Catenary and Wave SystemsNithin KannanNoch keine Bewertungen
- Collapse Analysis 2Dokument15 SeitenCollapse Analysis 2samiransmitaNoch keine Bewertungen
- Froude-Krylov Force CoefficientDokument20 SeitenFroude-Krylov Force CoefficientLazaros NtoanidisNoch keine Bewertungen
- FEA Buckling AnalysisDokument10 SeitenFEA Buckling AnalysisalexrodriguezabcNoch keine Bewertungen
- Heerema standard criteriaDokument3 SeitenHeerema standard criteriajasonwu1115Noch keine Bewertungen
- Hawser Hooks For Tandem or Single Point Mooring PDFDokument6 SeitenHawser Hooks For Tandem or Single Point Mooring PDFSrinivasan RajenderanNoch keine Bewertungen
- GLND Guidelines For Loadouts 0013-ND - 7Dokument37 SeitenGLND Guidelines For Loadouts 0013-ND - 7Milandro Lou AcuzarNoch keine Bewertungen
- Master Thesis Per VatsvagDokument141 SeitenMaster Thesis Per VatsvagMoe LattNoch keine Bewertungen
- Vessel Due To ArriveDokument1 SeiteVessel Due To Arrivebasuki41cryptoNoch keine Bewertungen
- Cms 830 03 GL 70021 Jacket Foundation DesignDokument23 SeitenCms 830 03 GL 70021 Jacket Foundation DesignRajesh DodejaNoch keine Bewertungen
- Analysis of Warping and Shear Stress For Ship StructuresDokument134 SeitenAnalysis of Warping and Shear Stress For Ship StructuresSergio LanzellottoNoch keine Bewertungen
- Tutorial #1 KL4120 Offshore Platform Ocean Engineering ITB 2015Dokument13 SeitenTutorial #1 KL4120 Offshore Platform Ocean Engineering ITB 2015eNoch keine Bewertungen
- CD CM Overrides For Report Conductor Shielding FactorDokument2 SeitenCD CM Overrides For Report Conductor Shielding FactorRamesh SelvarajNoch keine Bewertungen
- Welding ScheduleDokument2 SeitenWelding SchedulenyaungzinNoch keine Bewertungen
- USD T BeamDokument10 SeitenUSD T BeammanowarNoch keine Bewertungen
- Sea TransportationDokument8 SeitenSea TransportationMark Samsel RohanNoch keine Bewertungen
- Introduction to Coastal Engineering ManualDokument5 SeitenIntroduction to Coastal Engineering ManualIgnatius SamrajNoch keine Bewertungen
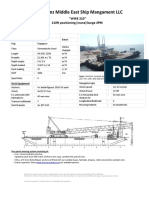
- Allianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMDokument2 SeitenAllianz Middle East Ship Mangament LLC: "WWE 210" 210ft Positioning (Crane) Barge 4PMCyril J PadiyathNoch keine Bewertungen
- Hydro Structure PapersDokument157 SeitenHydro Structure PapersChen Chu-yunNoch keine Bewertungen
- TUDelft Clay Suction PDFDokument8 SeitenTUDelft Clay Suction PDFDing LiuNoch keine Bewertungen
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsVon EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNoch keine Bewertungen
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityVon EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityNoch keine Bewertungen
- Numerical Models for Submerged Breakwaters: Coastal Hydrodynamics and MorphodynamicsVon EverandNumerical Models for Submerged Breakwaters: Coastal Hydrodynamics and MorphodynamicsNoch keine Bewertungen
- Grid Integration of Wind Energy: Onshore and Offshore Conversion SystemsVon EverandGrid Integration of Wind Energy: Onshore and Offshore Conversion SystemsNoch keine Bewertungen
- SEU Dynamic Analysis GN E-Feb17 PDFDokument40 SeitenSEU Dynamic Analysis GN E-Feb17 PDFding liuNoch keine Bewertungen
- ABS LNG Offshore RegulationsDokument9 SeitenABS LNG Offshore RegulationsgabelendaNoch keine Bewertungen
- Consequenc Assessment Model For Incidents Involving Release From LNG CarrierDokument128 SeitenConsequenc Assessment Model For Incidents Involving Release From LNG CarrierRichard HollidayNoch keine Bewertungen
- 493 NR - 2015 12Dokument64 Seiten493 NR - 2015 12Karan DoshiNoch keine Bewertungen
- Consequenc Assessment Model For Incidents Involving Release From LNG CarrierDokument128 SeitenConsequenc Assessment Model For Incidents Involving Release From LNG CarrierRichard HollidayNoch keine Bewertungen
- Marine Health, Safety, Quality and Environmental Management: Guide ForDokument56 SeitenMarine Health, Safety, Quality and Environmental Management: Guide ForgabelendaNoch keine Bewertungen
- Offshore Instalations Saving AppliancesDokument8 SeitenOffshore Instalations Saving AppliancesgabelendaNoch keine Bewertungen
- ABS 1997 Rules For Building and Classing Offshore InstallationsDokument94 SeitenABS 1997 Rules For Building and Classing Offshore InstallationsYuth YuthdanaiNoch keine Bewertungen
- ABS Floating LNG Terminals.Dokument19 SeitenABS Floating LNG Terminals.gabelendaNoch keine Bewertungen
- Rules For The Classification of Steel Ships: PART A - Classification and SurveysDokument332 SeitenRules For The Classification of Steel Ships: PART A - Classification and SurveysMuhammad NurazimNoch keine Bewertungen
- MHSQE Guide E-Oct08 PDFDokument56 SeitenMHSQE Guide E-Oct08 PDFgabelendaNoch keine Bewertungen
- IACS Wear of Chains - Guide For Anchoring Equipment in ServiceDokument10 SeitenIACS Wear of Chains - Guide For Anchoring Equipment in ServicegabelendaNoch keine Bewertungen
- Osv CodeDokument19 SeitenOsv CodegabelendaNoch keine Bewertungen
- Vessels With Oil Recovery Capabilities: Guide ForDokument12 SeitenVessels With Oil Recovery Capabilities: Guide ForanandaNoch keine Bewertungen
- Marine Health, Safety, Quality and Environmental Management: Guide ForDokument56 SeitenMarine Health, Safety, Quality and Environmental Management: Guide ForgabelendaNoch keine Bewertungen
- Marine Terminal Information Booklet Guidelines and Recommendations PDFDokument9 SeitenMarine Terminal Information Booklet Guidelines and Recommendations PDFgabelenda0% (1)
- Marine Breakaway Couplings Information PaperDokument20 SeitenMarine Breakaway Couplings Information Paperjamolina9093100% (5)
- Gas Detector Mgx2001Dokument44 SeitenGas Detector Mgx2001gabelendaNoch keine Bewertungen
- A08908 FelsSetal 103 PDFDokument870 SeitenA08908 FelsSetal 103 PDFgabelenda100% (3)
- A08908 FelsSetal 103 PDFDokument870 SeitenA08908 FelsSetal 103 PDFgabelenda100% (3)
- Sub-Bottom Profiler ORE Model 1036Dokument65 SeitenSub-Bottom Profiler ORE Model 1036gabelendaNoch keine Bewertungen
- Side Scan Sonar Mod 272TD-Users-ManualDokument92 SeitenSide Scan Sonar Mod 272TD-Users-Manualgabelenda0% (1)
- Perfilador Velocidad de Sonido Valeport Mod miniSVP - v2c PDFDokument1 SeitePerfilador Velocidad de Sonido Valeport Mod miniSVP - v2c PDFgabelendaNoch keine Bewertungen
- Side Scan Sonar Mod 272TD-Users-ManualDokument92 SeitenSide Scan Sonar Mod 272TD-Users-Manualgabelenda0% (1)
- Multibeam Reson Mod 8101Dokument2 SeitenMultibeam Reson Mod 8101gabelendaNoch keine Bewertungen
- Schootel Rudder PropellerDokument1 SeiteSchootel Rudder Propellergabelenda100% (1)
- Housing TypesDokument14 SeitenHousing Typessushmita hazarikaNoch keine Bewertungen
- Section 05120 Structural Steel Part 1Dokument43 SeitenSection 05120 Structural Steel Part 1jacksondcplNoch keine Bewertungen
- Irene Muliawan: Tarumanagara University - Bachelor of Accountancy - Aug 2016 - Jan 2020Dokument1 SeiteIrene Muliawan: Tarumanagara University - Bachelor of Accountancy - Aug 2016 - Jan 2020naboyaNoch keine Bewertungen
- Head Barista Job DescriptionDokument2 SeitenHead Barista Job Descriptionbarber rocxNoch keine Bewertungen
- Datasheet - LNB PLL Njs8486!87!88Dokument10 SeitenDatasheet - LNB PLL Njs8486!87!88Aziz SurantoNoch keine Bewertungen
- 2 X 660MWNCC POWER PROJECT UPS SIZING CALCULATIONDokument5 Seiten2 X 660MWNCC POWER PROJECT UPS SIZING CALCULATIONkkumar_717405Noch keine Bewertungen
- CASE 2901: Inquiry: Under What Requirements May External Loads (Forces and Bending Moments) Be Evaluated ForDokument2 SeitenCASE 2901: Inquiry: Under What Requirements May External Loads (Forces and Bending Moments) Be Evaluated ForDijin MaroliNoch keine Bewertungen
- SC1000 60HZ Cummins GeneratorDokument4 SeitenSC1000 60HZ Cummins GeneratorChen CarolineNoch keine Bewertungen
- Chapter 1 PPT (Compressibility and Consolidation)Dokument65 SeitenChapter 1 PPT (Compressibility and Consolidation)Eba GetachewNoch keine Bewertungen
- (JPP-1) - (Indefinite Integration) - 11th SepDokument52 Seiten(JPP-1) - (Indefinite Integration) - 11th Sepfunnyvideos. comNoch keine Bewertungen
- Contanuity Case StudyDokument14 SeitenContanuity Case StudyUsama TariqNoch keine Bewertungen
- Biology Thesis by SlidesgoDokument39 SeitenBiology Thesis by SlidesgoKristian Hezekiah DuyoganNoch keine Bewertungen
- Shs Environmental AttitudeDokument19 SeitenShs Environmental AttitudeProfTeng DePano RecenteNoch keine Bewertungen
- Swimming at Key Stages 1 and 2 Schemes of Work and Session Plans For Advanced SwimmersDokument20 SeitenSwimming at Key Stages 1 and 2 Schemes of Work and Session Plans For Advanced SwimmersShadrack MutisoNoch keine Bewertungen
- BS 812-110-1990 Testing AggregatesDokument12 SeitenBS 812-110-1990 Testing Aggregatesbatara2007Noch keine Bewertungen
- Lexmark™ X950de, X952dte and X954dhe (7558-xxx) - Service ManualDokument1.178 SeitenLexmark™ X950de, X952dte and X954dhe (7558-xxx) - Service ManualNikkiSpencerNoch keine Bewertungen
- Build Ubuntu for Ultra-96 FPGA DevelopmentDokument5 SeitenBuild Ubuntu for Ultra-96 FPGA Developmentksajj0% (1)
- What Is Change Management and Why Is It Important (Discussion Board)Dokument2 SeitenWhat Is Change Management and Why Is It Important (Discussion Board)Arun KumarNoch keine Bewertungen
- Iron and Steel ReviewDokument2 SeitenIron and Steel ReviewSajal SinghNoch keine Bewertungen
- An Urgent Need To Modernize: Public Health Data Modernization InitiativeDokument2 SeitenAn Urgent Need To Modernize: Public Health Data Modernization InitiativeRyza Jazid BaharNoch keine Bewertungen
- 1 s2.0 S1366554522001557 MainDokument23 Seiten1 s2.0 S1366554522001557 MainMahin1977Noch keine Bewertungen
- Webpage Evaluation GuideDokument1 SeiteWebpage Evaluation Guideankit boxerNoch keine Bewertungen
- Lion Dam Gate Seals - INTLDokument3 SeitenLion Dam Gate Seals - INTLIoannis SanoudosNoch keine Bewertungen
- WAE ParaphrasingAndPlagiarism Pp127 136Dokument37 SeitenWAE ParaphrasingAndPlagiarism Pp127 136คิคะปู้ นะจ๊ะNoch keine Bewertungen
- Forever Living ContractDokument2 SeitenForever Living ContractRishi SehgalNoch keine Bewertungen
- TLEN 5830-AWL Lecture-05Dokument31 SeitenTLEN 5830-AWL Lecture-05Prasanna KoratlaNoch keine Bewertungen
- Coggins Pop CycleDokument3 SeitenCoggins Pop Cycleapi-518568920Noch keine Bewertungen
- Ling 390 Morphology HW ExercisesDokument9 SeitenLing 390 Morphology HW ExercisesMAIMUNAH REIHANAHNoch keine Bewertungen
- Leadership Styles - Types of Leadership Styles - BBA - MantraDokument5 SeitenLeadership Styles - Types of Leadership Styles - BBA - Mantrakarthik sarangNoch keine Bewertungen
- Electronic Devices and Circuit TheoryDokument32 SeitenElectronic Devices and Circuit TheoryIñaki Zuriel ConstantinoNoch keine Bewertungen