Das könnte Ihnen auch gefallen
- Variable Speed DrivesDokument546 SeitenVariable Speed DrivescysautsNoch keine Bewertungen
- 4DX Pro System Manual - EngDokument26 Seiten4DX Pro System Manual - EngAlejandro Cabrera67% (6)
- Fluke 8062a Service ManualDokument124 SeitenFluke 8062a Service Manualmuszeresz100% (1)
- Fire Triangle:: Fire Is The Combination of HEAT, FUEL & OXYGEN. Fire Is The Chemical Reaction of Heat, Fuel & OxygenDokument3 SeitenFire Triangle:: Fire Is The Combination of HEAT, FUEL & OXYGEN. Fire Is The Chemical Reaction of Heat, Fuel & OxygenMohammad Jahid AlamNoch keine Bewertungen
- 02 PDFDokument17 Seiten02 PDFSerban LucianNoch keine Bewertungen
- BA BT300 DLT1201 13 aEN 009Dokument188 SeitenBA BT300 DLT1201 13 aEN 009Teddy HariyantoNoch keine Bewertungen
- Research To Study Variable Frequency Drive and Its Energy SavingsDokument4 SeitenResearch To Study Variable Frequency Drive and Its Energy SavingsIjsrnet EditorialNoch keine Bewertungen
- Techrite Siemens Siemens Lme Series Burner Controls 013060320901Dokument28 SeitenTechrite Siemens Siemens Lme Series Burner Controls 013060320901Kang KamalNoch keine Bewertungen
- PID Tuning TutorDokument4 SeitenPID Tuning TutorKiran KulkarniNoch keine Bewertungen
- Performance Analysis of Stand-Alone PV System Using Single Voltage Sensor Based MPPT MethodDokument7 SeitenPerformance Analysis of Stand-Alone PV System Using Single Voltage Sensor Based MPPT MethodIJRASETPublicationsNoch keine Bewertungen
- MEM 341 - Chapter 13 Pneumati CircuitDokument14 SeitenMEM 341 - Chapter 13 Pneumati CircuitMuhammad AbdullahNoch keine Bewertungen
- FL Sim p4-6Dokument369 SeitenFL Sim p4-6pauloghunterNoch keine Bewertungen
- Boiler Level PID ControlDokument6 SeitenBoiler Level PID ControlRio EstikaNoch keine Bewertungen
- Design of Solar Water Pumping System With FCMA Soft StarterDokument4 SeitenDesign of Solar Water Pumping System With FCMA Soft StarterRiad TifaNoch keine Bewertungen
- 1 s2.0 S0038092X17303377 MainDokument15 Seiten1 s2.0 S0038092X17303377 MainCaroline TedescoNoch keine Bewertungen
- EE6511-Control and Instrumentation Laboratory - 2013 - RegulationDokument98 SeitenEE6511-Control and Instrumentation Laboratory - 2013 - Regulationmokshagna saitejaNoch keine Bewertungen
- Quemadores Modulares Ficha Tecnica RS - M - TS0015UK02Dokument36 SeitenQuemadores Modulares Ficha Tecnica RS - M - TS0015UK02maikolNoch keine Bewertungen
- OP AMP NotesDokument31 SeitenOP AMP NotesEbonguko ClintonNoch keine Bewertungen
- Project Report of Laser Security Alarm SystemDokument25 SeitenProject Report of Laser Security Alarm SystemB LIKHITH KUMARNoch keine Bewertungen
- Ness D8xD16x Installer ManualDokument88 SeitenNess D8xD16x Installer ManualMarkAshNoch keine Bewertungen
- 96 - 31 Combustion BenchmarkDokument42 Seiten96 - 31 Combustion BenchmarkKECS_kckNoch keine Bewertungen
- Assignment Report1Dokument20 SeitenAssignment Report1Keshav GopaulNoch keine Bewertungen
- Photovoltaic System 1Dokument62 SeitenPhotovoltaic System 1Ankit SinghNoch keine Bewertungen
- Cbus Training Manual V2-3-0Dokument149 SeitenCbus Training Manual V2-3-0Darwin BernardoNoch keine Bewertungen
- MiniatureCircuitBreakers Primer EN 201601250852395217 PDFDokument60 SeitenMiniatureCircuitBreakers Primer EN 201601250852395217 PDF3238NDNoch keine Bewertungen
- Riello Rs 44 Technical ManualDokument60 SeitenRiello Rs 44 Technical Manualferagur11Noch keine Bewertungen
- Microcontrollers Notes For IV Sem ECE StudentsDokument19 SeitenMicrocontrollers Notes For IV Sem ECE StudentsVigneshwar DhamodharanNoch keine Bewertungen
- Building Technologies: HVAC ProductsDokument28 SeitenBuilding Technologies: HVAC ProductsDavid'Sh VeraNoch keine Bewertungen
- Design of Solar Panel As Wind Turbine BladesDokument12 SeitenDesign of Solar Panel As Wind Turbine BladesIJRASETPublicationsNoch keine Bewertungen
- Sun Tracking System For Productivity Enhancement o PDFDokument9 SeitenSun Tracking System For Productivity Enhancement o PDFRameswaran BalasubramaniamNoch keine Bewertungen
- Sem2 Mechatronics LabsheetDokument18 SeitenSem2 Mechatronics LabsheetengrodeNoch keine Bewertungen
- PID ControlDokument32 SeitenPID Controlanurag_pai_1Noch keine Bewertungen
- Boiler-Tuning Basics, Part II PDFDokument12 SeitenBoiler-Tuning Basics, Part II PDFIain NeillNoch keine Bewertungen
- Single-Phase Power Transformers - Course Sample - 579439-591956 PDFDokument43 SeitenSingle-Phase Power Transformers - Course Sample - 579439-591956 PDFjhonxd05Noch keine Bewertungen
- Principles of CombustionDokument14 SeitenPrinciples of CombustionJesus Garcia100% (1)
- CorrigéDokument7 SeitenCorrigéIbrahima GueyeNoch keine Bewertungen
- 06 Programmable Logic Controller PracticalDokument3 Seiten06 Programmable Logic Controller PracticalAnkitNoch keine Bewertungen
- MQ135 (Ver1.4) - ManualDokument7 SeitenMQ135 (Ver1.4) - ManualPavankumar VijapurNoch keine Bewertungen
- Boiler Service ManualDokument60 SeitenBoiler Service ManualBrian JonesNoch keine Bewertungen
- Flame Detector Working Principle of The Flame DetectorDokument3 SeitenFlame Detector Working Principle of The Flame DetectorCJ Caño-JardinNoch keine Bewertungen
- University of Mauritius: (10 Mins Reading Time)Dokument3 SeitenUniversity of Mauritius: (10 Mins Reading Time)Keshav GopaulNoch keine Bewertungen
- Basic Programmable Logic Control - PLCDokument6 SeitenBasic Programmable Logic Control - PLCIzan SiroonNoch keine Bewertungen
- Variable Speed Chillers With PicvDokument1 SeiteVariable Speed Chillers With PicvPradeep SukumaranNoch keine Bewertungen
- Introduction To Operational Amplifiers: 0 in OutDokument3 SeitenIntroduction To Operational Amplifiers: 0 in Outjaya1816Noch keine Bewertungen
- Smart Metering For Low Voltage Using Arduino Due PDFDokument6 SeitenSmart Metering For Low Voltage Using Arduino Due PDFUmeshNoch keine Bewertungen
- Final Project MITMagnetic LevitationDokument5 SeitenFinal Project MITMagnetic LevitationfandinoNoch keine Bewertungen
- Intelligent Device Management Tutorial: CalibrationDokument16 SeitenIntelligent Device Management Tutorial: Calibrationtrozn2812100% (1)
- TroubleshootingDokument24 SeitenTroubleshootingAamer Khawaja100% (1)
- Bending The RulesDokument2 SeitenBending The RuleskikiuNoch keine Bewertungen
- Hollias Macs V6 Training: Hardware Introduction - KM SeriesDokument71 SeitenHollias Macs V6 Training: Hardware Introduction - KM Seriesmessam110Noch keine Bewertungen
- PLC Troubleshooting: Troubleshooting Inputs and OutputsDokument5 SeitenPLC Troubleshooting: Troubleshooting Inputs and OutputsMd Omar FaruqueNoch keine Bewertungen
- Adressable Intelligent Fire Alarm Panel ManualDokument31 SeitenAdressable Intelligent Fire Alarm Panel ManualAlai5119Noch keine Bewertungen
- Rfid Based Security System: A Project ReportDokument22 SeitenRfid Based Security System: A Project ReportHeartin HariNoch keine Bewertungen
- Industrial BoilersDokument26 SeitenIndustrial BoilersAnkit bohra0% (1)
- Colorado School of Mines CHEN403: 1 Where MinDokument12 SeitenColorado School of Mines CHEN403: 1 Where MinpoopoophoNoch keine Bewertungen
- Solve Electrical Problems With Thermal ImagingDokument4 SeitenSolve Electrical Problems With Thermal ImagingUdit AgrawalNoch keine Bewertungen
- 2009B (D09) C1 Question PaperDokument17 Seiten2009B (D09) C1 Question PaperLila LilakNoch keine Bewertungen
- VFD Fault DetectionDokument7 SeitenVFD Fault Detectionamk2009Noch keine Bewertungen
- Module IvDokument14 SeitenModule Ivbobby4u143Noch keine Bewertungen
- Power Quality and Dynamic Voltage Restorer (DVR)Dokument51 SeitenPower Quality and Dynamic Voltage Restorer (DVR)damarNoch keine Bewertungen
- 6th Central Pay Commission Salary CalculatorDokument15 Seiten6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Measurement of FLUKE Insulation Resistance MeggerDokument22 SeitenMeasurement of FLUKE Insulation Resistance MeggerEmmanuel S SombilonNoch keine Bewertungen
- Philips MasterLED2011Dokument7 SeitenPhilips MasterLED2011Emmanuel S SombilonNoch keine Bewertungen
- VFD Installation Checklist Danfoss IndustriesDokument4 SeitenVFD Installation Checklist Danfoss IndustriesEmmanuel S SombilonNoch keine Bewertungen
- Electrical PackageDokument260 SeitenElectrical Packageazmat_86Noch keine Bewertungen
- Facts Worth Knowing About Frequency ConvertersDokument167 SeitenFacts Worth Knowing About Frequency ConvertersEduardo SuarezNoch keine Bewertungen
- Traffic Lights PLC ControlDokument9 SeitenTraffic Lights PLC ControlEmmanuel S SombilonNoch keine Bewertungen
- Digital Air - Conditioner Controller KR - 454Dokument42 SeitenDigital Air - Conditioner Controller KR - 454Emmanuel S Sombilon100% (1)
- Pcea: ": Electrical Preventive Maintenance - Spend A Little - Save A Lot"Dokument30 SeitenPcea: ": Electrical Preventive Maintenance - Spend A Little - Save A Lot"Arnulfo LavaresNoch keine Bewertungen
- DigiSpeed GX User030Dokument22 SeitenDigiSpeed GX User030Emmanuel S SombilonNoch keine Bewertungen
- Electro-Pneu Circ DiagDokument10 SeitenElectro-Pneu Circ DiagEmmanuel S SombilonNoch keine Bewertungen
- 3 Way and 4 Way SwitchesDokument2 Seiten3 Way and 4 Way SwitchesEmmanuel S SombilonNoch keine Bewertungen
- Autocad Shortcut Keys 2008Dokument4 SeitenAutocad Shortcut Keys 2008Emmanuel S SombilonNoch keine Bewertungen
- Legrand Catalogue 2012 Industrial Plugs SocketsDokument14 SeitenLegrand Catalogue 2012 Industrial Plugs SocketsLelli KurniaNoch keine Bewertungen
- Protecting Transmission Lines Terminated Into Transformers: Elmo Price and Roger Hedding, ABB IncDokument12 SeitenProtecting Transmission Lines Terminated Into Transformers: Elmo Price and Roger Hedding, ABB IncproteccionesNoch keine Bewertungen
- s200 Typical 3 Line-Sch r2 20kv SWGR Cb200a Coupler Jabar 17-2Dokument12 Seitens200 Typical 3 Line-Sch r2 20kv SWGR Cb200a Coupler Jabar 17-2Agam HutapeaNoch keine Bewertungen
- General Radio 1650-BDokument60 SeitenGeneral Radio 1650-BkrendelaNoch keine Bewertungen
- Disconnect Switches and Operating MechanismDokument28 SeitenDisconnect Switches and Operating MechanismReginald D. De GuzmanNoch keine Bewertungen
- DatasheetDokument466 SeitenDatasheetJonas Hamilton100% (1)
- Kit de Tierra Mod 200ecs-G3Dokument2 SeitenKit de Tierra Mod 200ecs-G3Carlos.MurilloNoch keine Bewertungen
- PLC AnsDokument21 SeitenPLC Ansali158hNoch keine Bewertungen
- Tram 2 PreampDokument30 SeitenTram 2 Preampdecky999100% (1)
- EFEN ChangeoverDokument2 SeitenEFEN ChangeoverSalmanNoch keine Bewertungen
- Weidmuller DRAC Series AC Receptacles Flyer LIT0915 072016v1 PDFDokument2 SeitenWeidmuller DRAC Series AC Receptacles Flyer LIT0915 072016v1 PDFeuqehtb100% (1)
- Lect 9,10 - MOSFET DC AnalysisDokument17 SeitenLect 9,10 - MOSFET DC Analysisshashikala kotiNoch keine Bewertungen
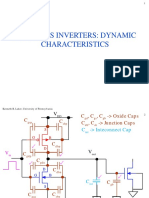
- Ee 560 Mos Inverters: Dynamic CharacteristicsDokument41 SeitenEe 560 Mos Inverters: Dynamic CharacteristicssallyNoch keine Bewertungen
- Design & Construction of A 220V Voltage StabilizerDokument48 SeitenDesign & Construction of A 220V Voltage StabilizerSboNoch keine Bewertungen
- COMMNG-ELEC-053 PMCC Charging ProcedureDokument3 SeitenCOMMNG-ELEC-053 PMCC Charging ProceduresantoshkumarNoch keine Bewertungen
- UCM224D - Technical Data SheetDokument8 SeitenUCM224D - Technical Data Sheet3efooNoch keine Bewertungen
- Easy Servo Motors: Stepper Motors With Encoders, 0.9 NM To 20 0 NMDokument13 SeitenEasy Servo Motors: Stepper Motors With Encoders, 0.9 NM To 20 0 NMKarthick MNoch keine Bewertungen
- Trouble Shooting For DT410 - UK-samlet04082017SDokument27 SeitenTrouble Shooting For DT410 - UK-samlet04082017Swirawat patthumNoch keine Bewertungen
- User's Guide: Continuity Tester Pro Model CT20Dokument1 SeiteUser's Guide: Continuity Tester Pro Model CT20Adam SonenshineNoch keine Bewertungen
- 1SBL367001R1300 Af52 30 00 13Dokument6 Seiten1SBL367001R1300 Af52 30 00 13NISHANNoch keine Bewertungen
- F24 60 en (A4) V1.2Dokument2 SeitenF24 60 en (A4) V1.2dozer_kamilNoch keine Bewertungen
- IM in ELEN-30083-ELECTRICAL MACHINES-PALUSTRE #RPPDokument62 SeitenIM in ELEN-30083-ELECTRICAL MACHINES-PALUSTRE #RPPAHSTERINoch keine Bewertungen
- How To Prepare Schedule of LoadsDokument6 SeitenHow To Prepare Schedule of LoadsFlorencio Jolongbayan0% (1)
- Item Description Required by Supplier: Data Sheets: MV / LV TransformersDokument1 SeiteItem Description Required by Supplier: Data Sheets: MV / LV TransformersessamNoch keine Bewertungen
- 3842406Dokument43 Seiten3842406veeru_virenderNoch keine Bewertungen
- Ee101 BJT 1Dokument95 SeitenEe101 BJT 1Shubham MittalNoch keine Bewertungen
- Group AssignmentDokument1 SeiteGroup AssignmentMulugetaNoch keine Bewertungen
- QBankDokument4 SeitenQBankdanang4166Noch keine Bewertungen
- ECE 765 - Module 2A - FinalDokument20 SeitenECE 765 - Module 2A - FinalNamiraNoch keine Bewertungen
- CH7 - IC Design تصميم الدارات المتكاملةDokument76 SeitenCH7 - IC Design تصميم الدارات المتكاملةOmran ShahrourNoch keine Bewertungen