Beruflich Dokumente
Kultur Dokumente
Static Frequency Convertor
Hochgeladen von
Rahul ChoubeyCopyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Static Frequency Convertor
Hochgeladen von
Rahul ChoubeyCopyright:
Verfügbare Formate
GE Energy
Rev. : B
Page : 1/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1. SYSTEM DESIGN
1.1. PURPOSE
Gas Turbine need starting equipment to accelerate from standstill and follow a preset
speed-time profile as required by the ignition and start-up procedure. Once the Gas
Turbine can deliver enough torque, further acceleration up to the synchronous speed is
accomplished by the turbine itself and the starting equipment is no more necessary.
The Synchronous Generator, fed by a suitable variable-voltage / variable-frequency power
source, can be used as a variable speed electric motor to start the Gas Turbine.
The variable-frequency power source is usually a thyristor converter: a static equipment
that, fed from the network, can supply the Synchronous Machine with finely controlled
voltage and frequency, so that the aforesaid speed-time profile can be accured followed.
The converter equipment, known as Load Commutated Inverter ( LCI ), has gained wide
acceptance also in pumping storage stations and as industrial drive, due to its ability to
reach high power and/or high speed levels, and because of the robustness of the LCI.
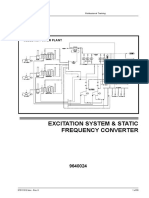
The simplified schematic diagram of the drive system is shown on Fig. 1. It shows the
overall system including the Gas-Turbine (GT), the Starter Equipment, the Filed Exciter
(SE) .
At start-up the Generator is disconnected from the medium voltage (m.v.) Main Bus and is
supplied by the Starter Equipment that takes the power from the m.v. Auxiliary Bus
through the converter transformer ST.
L
D.C. LINK
K’ K” MS GT
ST
SN
SE
FIG.1.1
The Field Exciter regulates the Generator flux as required by the voltage rating limits of
the power converter, as recalled in the next paragraph.
When producing power the generator is connected to the main Bus and the Starter C.B. is
open. The Field Exciter regulates the generator flux to comply with the active and reactive
power requirements of the power station.
More details of the Starter Equipment include :
a ) current and voltage transformer that are used to acquire the converter input and
output current and voltage values as well as the value of the generator field current.
b) the Control equipment that is the Digital Control Module ( with the Converter
Interface and the PLC interface ).
c) the PLC that implements the drive logic and connects field signals
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 2/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.2 DESCRIPTION OF THE EQUIPMENT
1.2.1 Medium voltage dry type cast resin step down transformer
Fig. 1.2.1-1 MEDIUM VOLTAGE TRANSFORMER
The three phase type transformer shall be installed between a M.V. three-phase supply
line and a static converter . The transformer shall supply a rectifier bridge - six pulse, total
controlled, thyristor based Graetz bridge operating at fixed frequency
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 3/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
The transformer is ready to start.
Only the electrical connections between cables and connections bars of the primary
winding are to be performed.
It is appropriate to perform the fixing of the M.V. and L.V terminals and the connection
bars of the tapings using the following values of the fixing torque:
The transformer is endowed of N° 3 thermal sensors (PT100Ω), if not otherwise
requested, position one for each low-voltage winding and connect it to the displaying and
data management device that has two level of intervention (alarm and break down), the
following values are recommended for their calibration:
Insulation T Alarm T Break down
class (°C) (°C)
B 100 120
F 120 140
H 145 165
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 4/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Fig. 1.2.1-2 THERMAL SENSOR Fig. 1.2.1-3 DYSPLAY AND DATA
MANAGEMENT DEVICE
When the transformer is fitted up with a hausing there is no need to keep the insulation
distance while it is already kept between the transformer and the housing.
In the installation cabin it is necessary to perform openings for air inlet on the same level
of the floor for receiving the fresh air and to perform openings on the apposite side on
the upper side near the roof for outlet of the warm air.
During the operations of connections and installation of the transformer it is possible that
some tools, bolts and or washers have been inserted accidentally in the cooling ducts of
the windings or left on the transformer. Since it is necessary to clean up the transformer
accurately so that once the transformer is under voltage does not happen failures due to
the presence of strange objects
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 5/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.2.2 Medium voltage switchboards
Metal enclosed switchboard for indoor installation are made of standardized units employed
in the transformer cabins, to control and protect lines, transformers, motors and capacitors,
and usually in the M.V. electrical distribution.
Metal enclosed switchboards are constructed in standard and internal arc versions (in
compliance with IEC 298 Equipment AA ).
Legend
6
5
Aux. contacts box
4 Sf6 off-load switch
and earth switch
Operating mechanism
for open/close Sf6 off-load
switch and earth switch
Incoming line
M.V. circuit breaker
Inspection windows
Fig. 1.2.2 MEDIUM VOLTAGE SWITCHBOARDS
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 6/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.2.2.1 Main characteristics
The switchboards have the following characteristics:
Dimensions
the switchboard can be placed against the wall, since the front side is easily
accessible
Max service continuity and reliability
the internal metallic segregations, which separate the cubicles, allow the personnel
to replace fuses, circuit breaker, CT etc., even when the main bus bars are on
voltage.
Easy installation and connection
the units are assembled in the factory and tested before shipping, therefore they
need only to be fixed to the floor on site and then, coupled together and connected
to the external circuits.
Versatility and flexibility
any technical requirement of extension on already installed switchboards can be met
easily with any electrical layout to be carried out
Easy operation and maintenance
the front side switchboard inspection windows, the isolation and withdrawing of
circuit breakers and disconnectors allow a quick check-up and a long lasting
maintenance.
Surface treatments
the cubicles are carried out by prior zinc-plated steel sheets UNI EN 10142 and
sheets UNI EN 10111, then they are degreased and passivated. The external part is
powder painted in RAL 7030 grey with orange peel bright effect. On request, other
colours are at disposal.
Personnel safety
guaranteed by the following measures:
earthed enclosure and earthed equipments’ and components’ bulk.
continuity of protection circuits.
IP3x protection for enclosure and IP2x for the cubicles diaphragms against
contacts with part on voltage or in movement.
use of insulating safe materials, with creepage distances suitable for much
polluted environment.
1.2.2.2 Compartments
The switchboards are realised by joining the different types of standardised
compartments.
Each compartment generally consist of:
- a bus-bar cubicle
- a feeder – circuit-breaker cubicle
- an instrument cubicle
The bus-bar cubicle and the feeder – circuit-breaker cubicle are segregated from the
structure of the rotating disconnecting switch.
The instrument cubicle, with all the auxiliary circuits, is segregated from the bus-bar
cubicle by means of a metal partition.
The compartments are factory wired; to complete installation on site it is necessary simply
to connection the power and external auxiliary connections.
All the operating manoeuvres are carried out on the front of the switchboard with the
doors closed; doors must however be opened for maintenance purposes and/or when
replacing parts.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 7/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Bus-Bar Cubicle
The bus-bars are realised in copper flat bar and fixed to the terminals of the line
disconnecting switch or switch-disconnector, according to the type of compartment in
question; the bus-bars pass from one compartment to another directly, without the use
of baffle plates, forming a continuous duct.
Feeder Circuit-Breaker Cubicle
Access to the feeder circuit-breaker cubicle is provided through the door on the front of
the compartment. ( See Fig. 1.2.2.2-1 , 1.2.2.2-2)
The cubicle houses an ABB SACE HAD SF6 circuit-breaker in fixed or plug-in versions
fitted if necessary with on board current transformer, a line disconnecting switch, an earth
switch and the terminals for connection of the Medium Voltage cables.
The cubicle may also contain the following components:
- current transformer (in addition or as an alternative to those already installed on
board)
- voltage transformers
- capacitive voltage dividers
The window on the door of the cubicle makes it possible to inspect and check the position
of the disconnecting switches.
FRONT Internal Schema
View layout
Fig. 1.2.2.2-1 FEEDER CIRCUIT-BREAKER CUBICLE
250
2250
1150 1400
Fig. 1.2.2.2-2 FEEDER CIRCUIT-BREAKER CUBICLE
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 8/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Instrument Cubicle
The instrument cubicle is mounted in the auxiliary circuit drawer, above the feeder circuit-
breaker cubicle and in front of the bus-bar cubicle.
This cubicle contains all the low voltage equipment generally used, in particular the
following.
- terminal boards, raceways and cables for connection of the auxiliary circuits of the
cubicle and the other compartments of the switchboard
- auxiliary accessories of the circuit-breaker and cubicle ( metering instruments,
protection relays, control and signalling devices, fuses, protection circuit-breakers of
the auxiliary relays etc. )
1.2.2.3 Circuit breakers
The circuit breakers used in Switchboards are ABB SACE SF6 series HD4R circuit
breakers suitable for up to 1250 A at 24 kV (see figure 1.2.2.3).
They are ideal for the protection and control of transformers and distribution lines as well
as for motor control and protection.
The circuit breaker is supplied in fixed version.
The HD4/... circuit-breakers are constructed using the separate pole technique. They are
insulated in sulphur hexafluoride, for indoor installation, and are pressure systems sealed
for operating life (IEC 60056 and CEI 17-1 Standards).
In addition to the accessories supplied, the circuit breaker may also be fitted
with a key lock (open or closed position).
The three poles, the operating mechanism and any optional accessories are mounted on
a sturdy support frame.
Protection is guaranteed by the current transformers installed on the circuit breaker
together with the ABB SACE electronic release switches PR521.
For the electrical characteristics, please refer to the technical catalogue.
1 closing pushbutton
2 opening pushbutton
3 mechanical signalling device
for circuit-breaker open/closed
4 manual operating mechanism
1
5 mechanical signalling device 2
for closing springs 3
4
6 operation counter
5
6
Fig. 1.2.2.3 HD4R SF6 CIRCUIT-BREAKER
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 9/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.2.2.4 SF6 switch-disconnector / earthing switch
SF6 switch-disconnector / earthing switch includes a complete range of isolating and
disconnecting equipment, insulated in SF6 (which is also the arc quenching medium), with
respective operating mechanisms, that are described below.
These are two appliances in a single stainless steel parallelepiped hermetically welded
casing filled with SF6 at very low pressure to extinguish the electric arc and to insulate the
live components (between the phases and to earth) of the equipment housed in the
enclosure (see fig.1.2.2.4).
Fig. 1.2.2.4 – SF6 switch-disconnector / earthing switch
Epoxy resin bushings positioned on the upper and bottom surfaces ensure the electric
connection of the internal equipment consisting of a three-pole switch-disconnector and a
three-pole earthing switch with making capacity.
The operations of the two appliances is carried out by a special operating mechanism
(independent from the operator) installed on the front of the enclosure that permits placing
the internal equipment on the three positions shown by fig. 1.2.2.4a as follows:
Line close – Earth open;
Earth and line open;
Earth closed – line open
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 10/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Fig. 1.2.2.4a – operating mechanism
In addition to the operating mechanism, the front of the enclosure has a wide window that
Permits seeing the position of the internal equipment very clearly, the sealed filling plug
(vacuum and SF6 filling) and the moving shaft of the mobile contacts.
The safety valve for internal overpressure is installed on the back of the enclosure.
The hermetic seal of the enclosure against gas leaks (more than 30 years) is guaranteed
by means of toroidal O-rings on the external contact points.
The bushings may be equipped with capacitive dividers for connection to the voltage
detecting devices on the front of the operating mechanism.
N.B. The enclosure may be filled with sulphur hexa-fluoride, after emptying, only by
IMESA workshops.
SF6 line side isolator-earthing switch
The SF6 Line-Earthing switch is operated by means of a manual mechanism
dependent on the operator.
SF6 earthing switch
The Earthing switch is operated by means of of a manual mechanism dependent
on the operator.
SF6 insulated three-pole bushing
The resin bushing insulators are connected between the inlet and outlet by means
of a through bar. The explosion valve for internal overpressure is installed on the
back while only the SF6 filling tap is mounted on the front.
1.2.2.5 Earth
All the steel structural parts are connected together by means of special nuts and screws
designed to guarantee efficient electrical contact between the parts.
The doors are connected to earth by means of flexible copper strands having an
appropriate cross-section.
A 30 x 5 mm copper bus-bar connects the entire switchboard longitudinally to earth the
switchboard; the earth connections of the main equipment (disconnecting switch, line
disconnecting switch, current transformers, voltage transformers etc.) are branched on
each compartment.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 11/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.2.3. Static starter section
1.2.3.1. Product description
The static starter consist of 3 separated compartment ( See Fig.1.2.3 ) that contain:
a) POWER COMPARTMENT
- + 11 Compartment D.C. link smoothing reactor and earth switch
- + 12 Compartment Power thyristors module
b) AUXILIARY & CONTROL COMPARTMENT
- + 21 Compartment Control and auxiliary circuit
c) POWER DISTRIBUTION COMPARTMENT
- + 31 Compartment Disconnecting Switch (feeder exit)
+.11 +.12
DC LINK CONVERTER
2300
1200
2000 1000
Power Board +11 +12 Control Board +21 Disconnecting
(front) (front) Switch +31
(front)
Fig. 1.2.3 OVERALL DIMENSIONS BOARDS
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 12/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
a) Power Compartment
Main power components are the following :
-a1) Power thyristors module ( =G01 -GF01 )
-a2) D.C. link smoothing reactor ( =H01 -LL01 )
Feed transformer is not included in starter board.
-a1) Power Thyristors Module
The two bridges mentioned below are provided in this module :
rectifier stage, located in the lower part, inverter stage located in upper part
( See Fig.1.2.3a )
=G01.GF01
U V W
=H01.LL01
L1 L2 L3
Fig. 1.2.3a POWER MODULES ELECTRICAL DIAGRAM
The module consist of by three stacks on 4 levels with factory pre-charged
clamps ( See fig. 1.2.3b ) ;
these stacks are located inside a stell structure based on four wheels, to facilitate
extraction from board.
Each thyristor is protected by a R - C circuit ( snubber ) to damp commutation over -
voltages.
The R - C groups and pulse transformers ( that are used to amplify thyristors ignition
signals ) are mounted on insulating supports and located in front of the stacks ( See
fig.1.2.3c ); in this way a compact structure has been obtained; moreover, clamps pre -
charged stacks allows thyristor substitution on the spot in case of fault so that no stack as
to be disassembled and sent to the factory for replacement . The module is forced
ventilation cooling type ( see fig. 1.2.3d ). and it is located in the central upper part
compartment Nr +12 ( see fig. 1.2.3e ).
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 13/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
[front view]
Fig. 1.2.3d POWER MODULE
Fig. 1.2.3c R-C T.I. GROUP
Fig. 1.2.3b
FOUR LEVEL
STACK
[side view]
[front view]
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 14/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
FRONT REAR
Fig. 1.2.3e Nr. +12 COMPARTMENT FRONT and SIDE
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 15/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
a2) Dc link smoothing reactor
The reactor has the function to limit current waviness in the intermediate continuous
current circuit, it is usually made of an air cooled iron core. It is located in compartment
Nr. +11
( See fig.1.2.3f ).
It is equipped with a maximum temperature sensor.
=G3.D01 –XV01
=G3.D01 –XV01
=G3.L04 –BP01 =G3.L04 –BP01
=G1.H01 –LL01
=G1.J01 –QT01
=G1.H01 –LL01
=G3.Y01 –EH02
1000
Fig. 1.2.3f Nr +11 COMPARTMENT FRONT and SIDE VIEW
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 16/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
b) Auxiliary & Control Compartment
Compartment +21 contains all circuits and equipment completing the drive.
They consist of:
b.1) Control panel
b.2) Interface cards and transducers
b.3) PLC and relay circuits interfaced with it
The power supplies of these equipments derive, according to the Client availabilities, from:
Three-phase input line 415V 50Hz for auxiliaries and control
b.1 Control panel
Commonly referred to as control rack, it contains all control electronic cards, and, on the
side door, the local commands. See figure.
Control cards
for inverter
bridge, rectifier
bridge
and speed
Figure – Control rack
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 17/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
The control rack is divided as follows:
Frame 1 Power supplies
Frame 2 Control cards for rectifier bridge, inverter bridge of the converter and speed
regulator.
Frame 3 Redundant Control cards for rectifier bridge, inverter bridge of the converter
and speed regulator.
Frame 1
In this frame are assembled all power supplies necessary to generate the various power
supply voltages for the electronic cards.
Frame 2
This frame contains the cards that constitute the control; these cards are Europe 2 standard
size. They can present customizable components varying according to the application. For
this reason the values of these calibrations are reported in the customization sheets of the
project functional diagrams.
. NOTE Before replacing a card, check that all components that can be
calibrated match the system ones.
The control performs the following functions:
- speed regulator
- current regulator
- rectifier bridge phase shifter
- inverter bridge phase shifter
- interface towards converter (pulse generation, analog signal measuring)
- interface towards PLC
- thyristor monitoring (optional)
Frame 3
This frame contains the redundant cards that constitute the control; these cards are Europe
2 standard size. They can present customizable components varying according to the
application. For this reason the values of these calibrations are reported in the
customization sheets of the project functional diagrams
The following table shows a brief description of the cards available on the control.
FRAME 1 CARD NAME DESCRIPTION
- GA10 Power supply, combined with that in GA11 position
75W 15V feeder
position generates the 15Vdc for the control cards Frame 2
- GA11 Power supply, combined with that in GA10 position
75W 15V feeder
position generates the 15Vdc for the control cards Frame 2
- GA20 Power supply, combined with that in GA21 position
75W 15V feeder
position generates the 15Vdc for the control cards Frame 3
- GA21 Power supply, combined with that in GA20 position
75W 15V feeder
position generates the 15Vdc for the control cards Frame 3
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 18/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
FRAME 2/3 CARD NAME DESCRIPTION
Card manufactured by Ansaldo.
It manages the following functions:
– D position AINT02 Analog output among which :
- Current reference
- Speed levels
Card manufactured by Ansaldo.
It manages the following functions:
Inverter bridge angle adjustment
– F position ACPU02
Reference and ramp management
Current adjustment
User interface
Card manufactured by Ansaldo. It monitors the converter
analog quantities and trips at the preset threshold values
generating a hardware protection. It signals, by means of
7 LEDs located on the front panels, the tripped protection.
- H position APROT3 The card manages also all signals necessary to the
pulses enabling; the enabling is signaled by means of 5
green LEDS in the off status. Finally it is used for
generating the exciter current reference for the excitation
system, 3 leds indicate the severals kind of regulation.
Card manufactured by Ansaldo.
It processes the signals coming from the rectifier bridge
– J position AREV11 CTs and PTs, and it processes the three line voltages and
obtains the line frequency. The card holds a front
connector to interface with the terminal board card.
Card manufactured by ASI, current regulator, phase
shifter for 12 pulses rectifier bridge, interface of the
AGIF11 card to receive the commands to the inverter
- L position AGIM11
thyristors bridge. The card produces the logical signals for
firing the thyristors, from the catd 18 optic fibers depart
toward the converter.
Card manufactured by Ansaldo. It processes the signals
coming from the inverter bridge PTs and CTs.
The encoder signal emulator for speed acknowledge.
- N position AREV11 The speed reaction is obtained from the machine voltages
through Hz / V converters.
A front connector is assembled on the card to interface
with the terminal board card.
Card manufactured by ASI., phase shifter of inverter
bridge.
In base to the angle of inverter, the card produces the
logical signals to generate the firing command for the
- P position AGIF11 variable frequency bridge. The card manages the
functionality of recognition of the position of the rotor in
case of start up from zero speed, moreover to reverse
the pulses of the thyristors to have the possibility to work
on 4 quadrants.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 19/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Local commands, lamps and instruments.
For the local management of the drive, on the door of the +13 compartment they are
anticipated the followings commands:
Reset Pushbutton =G3.N02- SB01
Emergency Pushbutton =G3.N02- SB02
Control Selector switch =G3.N02- SB03
There are a series of analogics instruments for the visualization of the principal greatness
Field Current Indicator =G3.U01 - PA01
Converter Input Voltage Indicator (Delta group) =G3.U01 - PV01
Indicator Of The Dc Current Converter =G3.U01 - PA02
Generator Voltage Indicator =G3.U01 - PV02
Set Speed Indicator =G3.U01 - PF01
and a
Operator Panel =G3.N01 – HS01
Temperature transformer monitoring unit =G3.R01 – TH01
The-HS01 text viewer is directly connected to the PLC CPU where all drive alarms and
states can be read (see chapter 1.5.8 for the message list).
-PA01 -PV01 -PA02 -PV02 -PF01
Temperature
Programmable text monitoring unit
viewer
HS01 -TH01
Reset Selector
Pushbutton Switch
-SB01 -SB03
Emergency
Pushbutton
-SB02
Front door cubicle +21
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 20/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
b.2 Interface cards and transducers
The function of the interface cards is that of connecting and adapting all signals coming
from the transducers located in the power compartments and from outside the panel.
All these cards are 24Vdc supplied and are divided as follows:
Cards for digital signals
Cards for analog signals
The cards can present customizable components varying according to the system. For this
reason the values of these calibrations are reported in the customization sheets of the
project functional diagrams.
. NOTE Before replacing a card, check that all components that can be
calibrated match the system ones.
Even if the transducers are not located inside the auxiliary compartment, due to their
connection with the interface cards, they will be described in this section.
Cards for digital signals
This group includes those cards managing the digital signals from and to the control. The
connection of these cards is accomplished through a multi polar cable with a 37 pin
connector, while towards the field it is obtained by means of a screw terminal board.
The following table shows a brief description of the digital cards
CODE CARD NAME DESCRIPTION
Card not manufactured by Ansaldo, connected to the
- AX05 CPD37F AINT02 control card. It consists of :
- AX06 16 digital inputs
16 digital outputs
Used in positive logic to communicate with the PLC.
Card manufactured by ASI, connected to the APROT3
control card, inside the card:
3 output relays with exchange contact, and 9 output
- AX07 signal.
- AX08 8 inputs for positive logic to be customized, each with a
XPROT3
10Ω 0,25W resistance.
14 leds to detect whether the channel is active. Used to
send and receive information from the PLC and the relay
logic.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 21/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Card for monitoring the input breaker status:
CODE CARD NAME DESCRIPTION
Card manufactured by ASI, has two channels: the first one
- AX09 XBA52A used for monitoring the opening coil of input circuit
- AX10 breaker, its operation can be compared to the function of a
contact anticipated on the opening, used for disable the
pulses of converter bridge to open the breaker without
current.
The second is used for the monitoring of the aux. dc
voltage (110V) of the main circuit breaker –Q570/-Q571
The input of the card has to be connected in parallel with the opening command, on the
main coil.
1) When the breaker is close and the opening contacts are open, a current circulate
through the resistors in the coil, this current is enough to activate the optical relay.
When any opening contact from external occurs, the optical relay switch off, and the signal
is sent to SFC control that removes the thyristors pulses immediately. The opening time of
the circuit breaker is enough to have the pulses suppression before, hence the breaker
open always without current.
-x_
-x_
86G SFC
-x_
-x_
YO Opening coil
Note: The card works just when is connected on the main opening coil, not when is used
an auxiliary relay as support to open the circuit breaker.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 22/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Cards for analog signals
This group includes those cards managing the analog signals for the control; the connection
of these cards is accomplished by means of a multi polar cable with a 25 pin connector,
while towards the field it is obtained by means of a screw terminal board.
The following table shows a brief description of the digital cards.
CODE CARD NAME DESCRIPTION
Card manufactured by Ansaldo, connected to the AREV11
control card. J pos., it receives the rectifier bridge CT’s and
- AX01
XREV11 PT’s feedbacks and the external speed set point from DCS.
- AX02
The card AX01 sends also the excitation current set point to
the excitation system.
Card manufactured by Ansaldo, connected to the AREV11
- AX03
XREV11 control card. N pos., it receives the inverter bridge CT’s and
- AX04
PT’s feedbacks and the field current signal.
Transducers
They are divided into current transducers (CT Lem), voltage transducers (magnetic PTs
and lem) and signal transducers.
The current transducers are Hall effect measure transformers assembled on AC side bars
in each converter. As the output signal is in mA, it will suitably processed on the interface
card.
The Hall effect voltage transducers are used on the fixed and variable frequency circuit. As
the output signal is in mA, it will suitably be processed on the interface card.
The function of the signal transducers is that of adapting the signals from and to the control
to the desired value and form.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 23/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
The following table shows a brief description of the transducers assembled in the drive.
CODE COMPONENT NAME DESCRIPTION
Current transducer. It detects the AC current
- CT01/02 CT’s Lem
circulating in the rectifier bridge R and S
Compartment 12 2000A/0,4A
power cable phases
Voltage transducer. It detects the voltage
- PT01/02 PT’s Lem
between lines of the rectifier bridge R - T
Compartment 12 2000V/50mA
and T – S phases .
Current transducer. It detects the AC current
- CT05/06 CT’s Lem
circulating in the inverter bridge U and V
Compartment 12 2000A/0,4A
power cable phases..
Voltage transducer. It detects the voltage
- PT05/06 PT’s Lem
between lines of the inverter bridge U-W
Compartment 12 2000V/50mA
and W-V phases.
- UV01 Signal transducer for input coming from the
420mA / 010V
Compartment 21 turbine control (speed reference).
- UV02 Signal transducer for input coming from the
420mA / 010V
Compartment 21 exciter (field current).
- UV03 Signal transducer for output towards the
010V / 420mA
Compartment 21 exciter (excitation current reference).
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 24/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
b.3 PLC and its interfaced relay circuits
All panel input and output signals are galvanically separated by means of 8 relay terminal
board cards as shown in the figure below, except for the commands to the average voltage
switches that use relays with power contacts.
The coils of input cards and power auxiliary relays are equal to 110Vdc, while input cards
and logic relays are equal to 24Vdc.
Input
From / to
110Vdc 24Vdc PLC and
Relay logic
Output
Galvanic separation
Ensured by the interface cards
The PLC used for this application is a GE FANUC type 90-30 series and it consists of:
- 56 digital input points
- 48 output points
boxes can be supplied, as an option, for:
- analog inputs
- MOD – BUS rtu slave communication
Thanks to the PLC all the panel logic and the communication with the supervision system
are developed.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 25/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
FRONT
=G3.U01 -AJ
=G3.U01 –AJ01
=G3.U01 –AJ02
Fig. 1.2.3g Nr +21 COMPARTMENT FRONT
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 26/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
LEFT SIDE RIGHT SIDE
FRONT
FRONT
Fig. 1.2.3h Nr +21 COMPARTMENT SIDE VIEW
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 27/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Fig. 1.2.3m Nr +21 COMPARTMENT - REAR VIEW
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 28/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
c) Power distribution compartment
The disconnecting switch is used to be sure of the electrical insulation between the
generator and the inverter during the stand-by condition.
The disconnector switch work automatically, during the start up sequence and the shut
down, by means of a motor drive electric controller activated with the PLC logic.
The opening and closing command are be ensured through the limit switch assembled on
the panel near the gear motor.
Fig. 1.2.3n Nr +31 COMPARTMENT
The disconnector is equipped with a crank handle used just in case of maintenance.
Any attempt to use the disconnector manually during the SFC operation break off the
sequence.
A safety interlock with generator have to be realized to be sure that every maintenance
operation will be execute in safety condition.
(see operation chapter)
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 29/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Fig. 1.2.3p Nr +31 COMPARTMENT FRONT and SIDE VIEW
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 30/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.3. FUNCTION
1.3.1 Electrical drives
The block diagram of an electrical drive controlled by a power converter is shown in
Fig.1.3.1a. The load is usually a machine designed to accomplish a certain task, for
example a fan, a centrifugal pump, propulsion thrusters, and so constitute a load for the
electrical drive.
POWER
LOAD
LINE THYRISTOR
SOURCE CONVERTER MOTOR
SENSING CONTROL SENSING
UNIT UNIT UNIT
REFERENCE
SIGNAL
Fig. 1.3.1a – Block Diagram of an electrical drive
The requirements of the load can be specified in terms of speed and torque demands. In
order to select a suitable drive for a specific load it is necessary to obtain complete
information about the load requirements,
A motor having speed-torque and speed-current characteristics that suit the load
requirements is chosen. A motor will have characteristics compatible to the load if it
satisfies the speed and torque requirements of the load without exceeding the current
limitation imposed either by the motor rating or the source capacity.
Usually the natural speed-torque characteristic of the motor is not compatible with the load
requirements, for this reason a power converter is interposed between the line source and
the motor. Fig. 1.3.1b shows an example of torque-speed characteristic.
Torque
Speed
Fig. 1.3.1b – Speed torque characteristic of a fan
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 31/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
The power converter controls the flow of the power from the source to the motor in such a
way that the motor speed-torque and speed current characteristics are compatible with
the load requirements.
The control of the converter is enclosed in a control unit which operates at much lower
voltage and power levels. The control units consists of micropocessor, PLC, lnear and
digital integrated circuits.
The reference signal (ex. seed setpoint ) adjusts the operating point of the drive and it is
an input for the control unit.
The control unit is electrically isolated from the power converter mainly for two reasons:
a) Without isolation a malfunction in the power converter or in the motor may lead to the
application of the power voltage to the control unit damaging the control and may
attempt the safety of the operator during the drive start up tuning or during the
maintenance.
b) Converter generates harmonics, without isolation the harmonics can enter in the
control and interfere with its operation
The sensing of certain quantities as converter current and voltage, motor speed is usually
required for protection and closed loop regulation (speed regulation loop, current
regulation loop) and metering. The sensing transducers of the power converter electrical
quantities are isolated from the control unit for the reasons stated above.
The complete drive system consisting of the load, motor, power converter, line source and
sensing unit should be considered as an integrated system. The power converter should
be selected to make the motor characteristics suitable the load taking into account the line
supply source and rules governing its use, for example it may be necessary to limit the
current inrush during starting to avoid voltage fluctuations on the supply line.
1.3.2 Fundamental motion equation
Any motor load system can be described by the following fundamental motion equation:
d m
T TL J (2.1)
dt
where :
T [Nm] developed torque of the motor
TL [Nm] load resisting torque, referred to the motor shaft
J [kgm2] moment of the inertia of the motor-load system referred to the motor shaft
m [rad/sec] instantaneous angular velocity of the motor shaft.
Equation (2.1) shows that the torque T developed by the motor is counterbalanced by the
load torque TL and by the dynamic torque Jdm/dt that is called dynamic torque because it
is present only during transient operation.
The drive accelerates or decelerates depending on whether T is greater or less than T L.
During the acceleration period, the motor shall supply not only the load torque T L but an
additional torque Jdm/dt to overcome the inertia of the motor-load system.
In application having a load with large inertia the motor torque must exceed the load torque
by a large amount to have and adequate amount of acceleration, on the other side in
application requiring fast response, the motor torque should be maintained at the highest
value and the motor-load system should be designed to have the lowest inertia.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 32/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
When the speed increases, the kinetic energy of the drive ½ J2m also increases, in
addition to the energy supplied to the load, the motor supplies the kinetic energy. During the
deceleration, the dynamic torque Jdm/dt changes its sign, the motion of the drive is
maintained by extracting energy from the stored kinetic energy. When the load has a high
inertia, the motor should produce a large braking torque (T is negative) to have adequate
deceleration, when it is required a fast rersponse, the braking torque should be maintained
at the highest value and the motor-load system should be designed with the lowest possible
inertia.
When motor torque T and load resistant torque TL are known it is possible to solve Eq. 2.1
in terms of time to get the speed vs time curve from speed 1 to speed 2 :
2
J
t ( ) T ( ) T ( ) d
1
L
(2.2)
Fig. 1.3.2a - Motor-drive Torque and Load Torque for Gas Turbine starter application
Fig. 1.3.2a shows an example of load resistant torque TL, note that when the Gas Turbine is
fired resistant torque changes sign becoming motoring torque, the same figure shows the
motor-drive available torque.
Fig. 1.3.2b – Typical Speed vs Time curve for Gas Turbine starting
Fig. 1.3.2b shows an example of Speed vs Time curve obtained by solving the integral
(2.2).
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 33/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.3.3 Double bridge converter
The fully controlled three-phase bridge with thyristor can function as a rectifier or as an
inverter. The converter can, by suitable control, reverse the polarity of the direct voltage, but
not the direction of the direct current.
Two three-phase bridges decoupled on the dc side by and inductor can interconnect two
three-phase systems of different frequencies and voltages, and provide for an exchange of
energy in the two directions. This double-bridge circuit is known also as dc link converter
(Fig.1.3.3.a).
RECTIFIER DC REACTOR
INVERTER
Idc
LINE Ldc
T4 T6 T2
T1 T3 T5
TCV L1 Lk L1(R) U(R) LU Lk"
CB
L2 Lk L2(S) V(S) LV Lk"
SM FIELD
L3 Lk L3(T) W(T) LW Lk"
T1 T3 T5
SYNCHRONOUS MOTOR f2
SUPPLY f1 T4 T6 T2
Fig. 1.3.3a – Dc Link Converter
The three-phase bridges may also be connected in series. The direct voltage is then
doubled.
At the same time, by using a star-delta transformer connection, it is possible to obtain
twelve-pulse converter operation, with reduction in harmonics (Fig.1.3.3b).
DC REACTOR
RECTIFIER Idc INVERTER
Ldc T4 T6 T2
T1 T3 T5
L1 Lk L1(R)
L2 Lk L2(S)
LINE L3 Lk L3(T) T4 T6 T2
y U(R) LU Lk"
CB
T4 T6 T2 V(S) LV Lk"
TCV SM
D LW Lk"
FIELD
T1 T3 T5
W(T)
d L1 Lk L1(R) T1 T3 T5
L2 Lk L2(S)
L3 Lk L3(T)
T1 T3 T5
T4 T6 T2
Fig. 1.3.3b – Twelve-pulse converter
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 34/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.3.4 Dc link converter
The dc link converter consists of two fully controlled three-phases bridges decoupled by an
inductor in the d.c. circuit. The circuit is known as d.c. link converter, because a direct
current Idc, smoothed by the inductor Ldc, flows between the two bridges (Fig.1.3.4a.)
The operation of the dc link converter is based upon simultaneous current and voltage
loading of both bridges. One bridges functions as a rectifier, the other as an inverter.
RECTIFIER DC REACTOR
INVERTER
Idc
LINE Ldc
T4 T6 T2
T1 T3 T5
TCV L1 Lk L1(R)
VdREC U(R) IMU LU Lk"
CB
L2 Lk IL2 L2(S) V(S) LV Lk"
SM FIELD
L3 Lk L3(T) W(T) IMV LW Lk"
IL3 VdINV
T1 T3 T5
SYNCHRONOUS MOTOR f2
SUPPLY f1 T4 T6 T2
Idc
Fig. 1.3.4a – DC Link Converter Operation
Fig. 1.3.4b – DC Link Load Characteristic
Fig. 1.3.4b illustrates the operation of the fully controlled d.c. link converter in case where
the two three-phase systems are similar (same frequency, voltage and short circuit
reactances).
The operating point of the inverter is taken to be with = 145°.
The delay angle of the rectifier then has to be set at 18° to obtain the required current at the
given voltage.
The rectifier (vdREC) and inverter (vdINV) direct voltage waveforms, the rectifier (VdREC) and
inverter (VdINV) average values (straight lines) and the line (VLST) and motor (VMRS)
alternating voltages are shown on Fig.1.3.4c.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 35/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Fig. 1.3.4c – DC Link Converter Direct Voltages
The dc link current (id) waveform, the average value (Id) of the dc current (straight line), the
line (iLS) and motor (iMR) phase currents are shown on Fig. 1.3.4d.
The two three-phase systems connected by the d.c. link converter can be of quite different
frequencies and short-circuits reactances, and also of unequal voltages.
Fig.1.3.4e shows the currents in the dc link converter fir a case in which the two three-
phase systems have frequency of 50 Hz (rectifier) and 52.5 Hz (inverter). The alternating
currents ILS of the rectifier and IRM of the inverter, and the direct current IDC, are modulated
at six time the frequency of both ac systems (300Hz and 315Hz). If the frequency of the two
ac systems are only slightly different (as in our case), beats are noticeable in the direct
current. In Fig. 1.3.4e is shown the beat frequency which frequency is six time the
difference of the two systems frequency:
Fb 6( Finv Frec ) 6(52.5 50.0) 15 Hz
Fig. 1.3.4d – DC Link Converter Direct Current
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 36/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Fig. 1.3.4e – DC Link Converter Coupling two different frequency systems
1.3.4.1 Power balance in the dc link converter
In the dc link converter with two controlled three-phase bridges and an inductive dc link
(Fig.1.3.4a) the power can transmitted between the two three-phase systems in either
direction. The direction of the power flow is determined by the manner in which the bridges
are controlled. The rectifier side functions as an energy source, the inverter side as a load.
The power transfer takes places between the a.c. voltage sources of the two systems. Only
the fundamental components (first harmonic) of the currents contribute to the power. The
active power (neglecting the losses of the bridges and dc link reactor) is always the same,
but the non-active powers can differ considerably, they depend upon the control angle of
the rectifier and inverter.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 37/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.4 DESCRIPTION OF THE INSTRUMENTATION AND CONTROLS
1.4.1 General
The user’s interface (SSDTERM) is a programme, operating in WINDOWS environment,
that allows the user to set / display the customization parameters of the speed regulator.
The location of the speed regulator cards in the box is as follows:
A C D
ACPU02
CARD
AINT02 Serial Link
CARD
COM1
The serial link cable, identification code 1000079378 + 1000079381, consists of what
follows:
BLACK
05 05 05
06 BLUE 06 06
04 BLACK 04 04
07 GREEN 07 07
03 BLACK 03 03
08 RED 08 08
02 BLACK 02 02
09 WHITE 09 09
01 01 01
CABLE with connector 9 pin MALE - MALE FEMALE ADAPTER
Code 1000079378 Code 1000079381
To climb on on
Side Personal Computer
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 38/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.4.2 User’s interface
SSDTERM
General
SSDTERM is a software tool that permits to carry out a fast and effective analysis
of the speed regulator operation state. It is not located permanently in the system
since it is designed for the heaviest diagnostic analyses such as the system
installation. The system is provided with a segment-type LED (ACPU02) for the
following elementary signals:
F The system is set in forward running motor mode.
G The system is set in braked forward running motor mode.
W The system is saving the regulator parameters in EEPROM.
The system is in error mode for AINT02 card is not present, or FLEX
1
programming was unsuccessful.
The system detected a parameter matching error, default parameters must
2 be loaded.
P The system received an external protection signal.
The hardware requirements needed by this tool are as follows:
IBM-compatible personal computer;
VGA graphic display (min. colour1024x760 pixel is suggested);
RS232 38400-baud serial line.
Windows 2000 NT / XP
The installed functions are:
displaying of logic and numeric variable values;
graphic displaying in real time of two numeric variables (Oscilloscope);
editing of specific installation parameters and relevant saving in EEPROM;
uploading and downloading of calibration parameters on ASCII files;
uploading and downloading of all the regulator data (Acpu02) on ASCII files;
on-line help.
If compared with LCD terminal, advantages are:
displaying of more data at the same time (e.g.: 2 windows with 15 variables and 16
flags);
graphic representations without making use of other tools;
file management permitting the data processing and printing even without system;
possible analysis of curves of interest (a posteriors).
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 39/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Description of the diagnostic software
This paragraph deals with the description of the SSDTERM programme in WINDOWS
version; the WINDOWS version keeps its setting and the same functions, yet adopting the
graphical look and the command immediacy that are typical of the execution environment.
The programme can be located on the personal computer in a directory other than the
work one, but all the files managed by the programme will be taken and put in the work
directory.
Conditions to start the programme it is necessary to be in WINDOWS environment and
enter:
Choose the correct COM
port and click CONNECT
PASSWORD : A B C D only to visualize the value
AA BB CC to change the value
Menu
After pressing pushbutton "continue" the following image will be shown on the display:
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 40/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Configuration
The commands available in the Configuration menu are:
It loads the file with .SSD extension chosen among
Open the ones available in the current directory
It saves all the system data and configuration in a file
Save with .SSD extension and name chosen b the user.
It displays the FLASH code existing in the target
If “configuration” is selected by , the following page is shown:
1 2 3
4 5
The CONFIGURATION page permits to get access to parameters, variable and control
states and to preset the oscilloscope functions.
The page is essentially subdivided into 5 windows.
Windows no. 2, 3 can be used to get access and, if necessary, to modify the control
parameters and to display their variables.
Windows no. 4, 5 can be used to get access and, if necessary, to modify the control flags.
Window no. 1 is utilized for oscilloscope function pre-setting.
Navigation in windows no. 2, 3, 4, 5:
In order to be able to move within the interface system, use of what follows can be made
in every window:
either the drop-down menu located or buttons called PgUp and PgDn located
high on the left down on the right
They permit to scroll the
A B various control pages
within which all its
dimensions are contained
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 41/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
The groups of variables that can be selected are:
ANALOG.INP.1 Analog inputs of ACPU02 card.
ANALOG.INP.2 Analog inputs of ACPU02 card.
ANALOG.OUTPUT Analog outputs of AINT02 card.
MEASUREMENT Synoptic of variables.
ExtRef + ManRamp External reference by digital input and manual ramps.
AUTOM. RAMP Speed regulator ramps in automatic mode.
CURR.LIMIT.MOT Current limits when the drive is used to drive the motor.
ANGLE REGUL. MOT Angle adjustment of inverter bridge. (motor mode)
CURR.LIMIT.GEN Current limits when the drive is used to recover energy.
ANGLE REGUL.GEN Angle adjustment of inverter bridge. (generator mode)
SPEED REGUL. GAIN Speed regulator gains.
SETUP THRESHOLD Speed threshold setup.
I2T Protection Stator overload protection setup.
EXC CURR.LIM. Rotor thermal protection.
TESTING Test menu.
Dimensions written in black can be only read.
On the contrary, the ones written brown can be modified.
In order to carry out a modification, put the mouse on the relevant cell containing the value
and click with the left button of the mouse.
In this way different windows are shown if a parameter or a flag is being modified.
PARAMETER: The window includes:
parameter denomination, [1]
variation range out of which setting is
not allowed [2]
presently set value [3]
zone intended for the new chosen
value typing in [4]
button(s) to choose the regulator to
1 which the modification has to be sent
2 [5]
3 the button to be utilized to exit the
8 7 function without changing the value
4 [6]
a small keyboard to type in the new
5 value [7]
two + - buttons to modify the
6 parameter value of the lowest
possible value [8]
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 42/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
FLAG: the window includes:
parameter denomination [a]
presently set value [b]
the new settable value [c]
button(s) to choose the regulator to which the modification has to be sent [d]
the button to be utilized to exit the function without changing the value [e]
Navigation in window no. 1::
button to get access are located high on the left:
To eliminate the selected variables
To set the visualization function [C]
To set the oscilloscope function parameters [B]
To set the oscilloscope function variables [A]
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 43/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
[A] Oscilloscope variable setting
This window displays the variables that can be selected for the oscilloscope
(no more than 8 per regulator).
In order to eliminate some parameters, select them pressing on the relevant denomination
with the left button of the mouse (they are pointed out in blue), then press the button with
scissors.
1 In order to input new parameters, select them in the same way in windows
no. 2, 3 and press “conf” button in the top part of the relevant window.
[B] Oscilloscope function parameter setting
This window displays the variables that can be selected for the oscilloscope
(no more than 8 per regulator).
In order to eliminate some parameters, select them pressing on the relevant denomination
with the left button of the mouse (they are pointed out in blue), then press the button with
scissors.
1 In order to input new parameters, select them in the same way in windows
no. 2, 3 and press “conf” button in the top part of the relevant window.
[C] scopE
If “scope” is selected by the following page is shown (fig.5.2.3.4a, b, c):
Clicking on this box i twill
be enable the automatic
stop and save of the
traces
Fig. 5.2.3.4a Example of oscilloscope page [ scopE ]
By this function all the variables existing in the regulator can be displayed in graphic
format.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 44/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
The available commands are shown at the display base:
AUTOSCALE NOW
It carries out the automatic setting of the variable scale values ranging between the
minimum and maximum of displaying, the abscissa is set between the lowest and
the highest values among all the dimensions.
MANUAL SET
If the automatic flag is deselected or manual set button is pressed, the ends of axis
Y are set with the two Minimum and Maximum windows.
VAR NAME
It displays all the chosen variables
Making use of the central table below (a row for every dimension) a plot (on/off)
command is associated to every dimension; it is utilized to enable or de-enable its
displaying (at least one of them must be always active). There are two cells to adapt
the signal with an offset and a gain)
INVERTED
The sign of the displayed dimension can be changed clicking on this button.
HISTORY
It creates a buffer in which the data present in scopE are saved.
The buffer dimensions depend on the number of variables and sampling time.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 45/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
PARAMETERS
It permits to change the parameters utilized in scales and diagnostic
Fig. 5.2.3.4b Example of oscilloscope page [ scopE ]
SAVE
It permits to create a file in which the data present in the Historical Buffer can be
saved.
This file can be seen again selecting the History function
Fig. 5.2.3.4c Example of oscilloscope page [ scopE ]
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 46/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
FlaGs
Selecting “Flag” by the following page is displayed.
The menu (Figure 5.2.3.5) permits to display all the inner and input/output logic inner
variables subdivided into 16-bit columns while, at the display base, the selected Flag,
already seen in Configuration menu, is still available.
If the password is enabled, the flags can be modified positioning the cursor on involved
variable that, as only two possible modes are available, can be changed pressing enter.
The only column the values of which can be modified normally is CONTROL; the output
flags can be modified too but only in diagnostic mode (Diag = ON) for the output relay test.
At the display base a help line indicates the available commands:
Press esc to exit the menu.
The code
indicates the
speed regulator
version
Fig. 5.2.3.5 Example of Menu flaGs
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 47/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
History
The menu permits to open one of n saved graphic files.
Selecting “History” by the following page is shown (fig.5.2.3.6a):
Fig. 5.2.3.6a Example of History page
Choose the file to be displayed.
When the file is open, the following page is shown (fig.5.2.3.6b):
Fig. 5.2.3.6b Example of History page
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 48/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
The following commands are available at the display base:
VALUES
It permits to display the numeric value of the chosen dimensions.
In order to help the analysis of recording two bars (a blue and a black one) are
available; they are moved by dragging or pressing black and blue >> ,<< buttons
that are located in the middle.
The value taken by each dimension in correspondence with the bars and the time
distance between the two bars can be seen up on the left.
BARS
Fig. 5.2.3.6c Example of History page
EXPORT
It permits to export the file for printing purpose or sending by e-mail.
Measure
The menu permits to have a graphic indication of the variables:
By means of
mouse
select one or
more of the
following pages
of PC interface:
The variables, that are shown, are the analog input/output of the AINT02 and ACPU02
cards.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 49/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Speed regulator
To understand the several parameters is preferred to introduce the speed regulator. The
speed regulation is carry out inside the control card ACPU02, it can be rappresented as below:
Rive Kp
- + Rico
Reve Ki/s
where:
Rive = internal speed reference
Reve = speed feedback
Kp = proportional gain
Ki =integral gain
Rico = current reference
As you can see on the schematic diagram above, for each analog input signal is possible to set
a filter by the set parameters, this issue will be discussed below.
The regulator is connected with the outside through the cards XREVOX as in the following
scheme:
From the output signal of the transducers, are made the signal to achieve the current reference
(RICO) as output of the speed regulator
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 50/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
A more complete scheme for explain the regulator input is the following:
Live Aut.
Rive
Rico
Rive Regulator
Live Man. Ramp PI
+
RiveReg
StepW
Reve Limcor
Aut Man.
The speed regulator can have two types of reference called Rive and RiveReg. Selecting Rive the
regulator will follow the planned reference, which will be created by the external reference and by
the insertion of the selected ramp. Selecting the reference instead RiveReg will have been
overlapped a step defined by the test parameters (stepW, TimeWsec) . This function is used for
trying the answer of the speed regulator.
StepW
TimeW
T T
Live
Rive
RiveReg
Reve
All the defined parameters are present in the various menus of the list parameters that will be
explained in the following pages. The various parameter pages are:
ANALOG.INP.1 Analog input to the ACPU02 card
ANALOG.INP.2 Analog input to the ACPU02 card
ANALOG.OUTPUT Analog output to the AINT02 card
MEASUREMENT Analog signal measuring
ExtRef + anRamp External reference and manual ramp parameters
AUTO. RAMP Ramp parameters in automatic mode operation
CURRENT LIMIT F Current limit characteristic in the motor operation
ANGLE REGUL. F Inverter firing angle characteristic in the motor operation
CURRENT LIMIT G Current limit characteristic in the generator operation
ANGLE REGUL. G Inverter firing angle characteristic in the generator operation
REGULATOR GAIN Speed regulator gains
SETUP THRESHOLD Signal threshold setting page
I2T protection Termic protection characteristic
Testing Test parameters setting page
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 51/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Here below will be done a more detailed explanation of the various parameters page.
Menu: ANALOG. INP1
In the following menu are present the analogical input signals with the relative parameters of
conditioning. Three types of parameters exist essentially:
the input greatness readable represented by [R]
the parameter FS that represents the full scale of the visualization, represented by [W]
the parameter FLT that represents the filter value used on the greatness [W]
The parameters are therefore:
Parameter Name Min/Max Value Typical Value Description
REVE % 0.00 / 650.00 R Speed feedback
LIVE An. % 0.00 / 650.00 R Outest analog speed reference
Continuous current of intermediate
IDC % 0.00 / 650.00 R
circuit
V MOT % 0.00 / 650.00 R Motor voltage
REVE 8V = % 30.00 / 650.00 W 100.00 Percentage for a 8V signal
LIVE 8V = % 30.00 / 650.00 W 100.00 Percentage for a 8V signal
IDC 6V = % 30.00 / 650.00 W 100.00 Percentage for a 6V signal
VMOT 8V = % 30.00 / 650.00 W 100.00 Percentage for a 8V signal
Filter on analog input Parameter x
REVE FLT RP 2 / 9000 W 100
1ms
Filter on analog input Parameter x
REVE FLT CN 1 / 9000 W 10
1ms
Filter on analog input Parameter x
LIVE FLT 1 / 9000 W 10
1ms
Filter on analog input Parameter x
IDC FLT 1 / 9000 W 10
1ms
Filter on analog input Parameter x
VMOT FLT 1 / 9000 W 10
1ms
The analog signal REVE % has two filters:
- REVE FLT RP
- REVE FLT CN
The filter REVE FLT RP is enabled only until the speed is less the 10% of the nominal value, the
REVE FLT CN instead is always enabled.
The parameters called “XXXX 8V=%” are used to change the percentage that correspond to 8V.
Usually at the nominal value for voltage or speed the correspondent analog signals have amplitude
of 8V but sometimes it could be present an offset that could be remove with this parameter.
If the parameter REVE 8V=% is setted to 110%, the 100% will be obtain with an analog signal of
7,2V of amplitude.
For analog signals, that represent current, the nominal value corresponds to a signal that has
amplitude of 6V.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 52/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: ANALOG. INP2
Likewise to the preceding menu also this menu represents analogical input greatness in entry to
the ACPU02. As for the preceding greatness, also in this case there are some parameters used
to set the greatness visualization.
The parameters are therefore:
Parameter Name Min/Max Value Typical Value Description
VDC % 0.00 / 650.00 R DC voltage
IEXC % 0.00 / 650.00 R Motor excitation current
VLINE % 0.00 / 650.00 R Line voltage
POWER % 0.00 / 650.00 R Line frequency
VDC 8V = % 30.00 / 650.00 W 100.00 Percentage for a 8V signal
IEXC 6V = % 30.00 / 650.00 W 100.00 Percentage for a 6V signal
VLINE 8V =% 30.00 / 650.00 W 100.00 Percentage for a 8V signal
POWER 8V =% 30.00 / 650.00 W 100.00 Percentage for a 8V signal
Filter on analog input Parameter x
VDC FLT 1 / 9000 W 10
1ms
Filter on analog input Parameter x
IEXC FLT 1 / 9000 W 10
1ms
Filter on analog input Parameter x
VLINE FLT 1 / 9000 W 10
1ms
Filter on analog input Parameter x
POWER FLT 1 / 9000 W 10
1ms
Likewise to the preceding menu the parameters “XXXX 8V = %” is used to define the
percentage for a 8V signal. These two menus contain the analog input variables of the regulator
and the parameters for their visualization.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 53/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: ANALOG.OUTPUT
Parameter Name Min/Max Value Typical Value Description
RICO % 0.00 / 650.00 R Current reference
LIVE Instr% 0.00 / 650.00 R Speed reference for instrument
Speed reference downstream of the
RIVE out% 0.01 / 650.00 R
ramp
REVE F % 0.01 / 650.00 R Speed feedback
RICO 6V=% 0.00 / 650.00 W 100.00 Percentage for a 8V signal
LIVE 8V=% 0.00 / 650.00 W 106.67 Percentage for a 6V signal
RIVE 8V=% 0.01 / 650.00 W 100.00 Percentage for a 8V signal
REVE F 8V=% 0.01 / 650.00 W 100.00 Percentage for a 8V signal
Filter on analog output Parameter x
RICO Flt 1 / 100 W 10
1ms
Filter on analog output Parameter x
LIVE Flt 1 / 65000 W 10
1ms
Filter on analog output Parameter x
RIVE Flt 1 / 65000 W 10
1ms
Filter on analog output Parameter x
REVE Flt 1 / 65000 W 10
1ms
Instr.Fs V 1 / 65000 W 10 Full scale in Volt of instrument
Instr.FsRpm 1 / 65000 W 4000 Full scale in rpm of instrument
LIVE FS Cal 30.00 / 650.00 R Percentage of 8V of the instrument
The output "Rico Amp" is the reference sent to the current regulator; the other output signals are
used for the instruments or for other diagnostic systems.
For the speed reference instrument there are three parameters:
- Instr. FS V
- Instr. FS rpm
- LIVE FS Cal
With the two inputs (Instr. FS V and Instr. FS rpm) the software calculates the corresponding
percentage (LIVE FS Cal) that has to be insert into the box LIVE 8V=%. If the instrument points to
a wrong number the operator can change the parameter LIVE 8V=%.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 54/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: MEASUREMENT
Parameter Name Min/Max Value Typical Value Description
LIVE-A % 0.00 / 650.00 R Speed reference in automatic mode
LIVE-M % 0.00 / 650.00 R Speed reference in manual mode
Speed reference utilized by the
LIVE % 0.00 / 650.00 R
regulator
Speed reference downstream of the
RIVE % 0.00 / 650.00 R
ramp
Speed reference downstream of the
RiveReg % 0.00 / 650.00 R
ramp + Step
CURRLIM % 0.00 / 650.00 R Current limit Motor/Generator
ANGLE FV 0 / 6500 R Inverter bridge firing angle
Speed error calculated by the
Errvel % -650.00 / 650.00 R
regulator
Idc/ImLim % 1 / 65000 R Load current per cent
(I-IE/IE) % 1 / 65000 R Rotor current per cent
Motor current limit for stator thermal
Curr.ST.I2T 0.00 / 650.00 R
protection
Motor current limit for rotor thermal
Curr.RT.I2T 0.00 / 650.00 R
protection
Trip ST I2T 0 / 65000 R Signal for motor thermal protection
Trip RT I2T 0 / 65000 R Signal for rotor thermal protection
This menu is used for diagnostic during the operation, in fact all the parameters are readable [R].
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 55/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: ExtRef + ManRamp
This menu is used to define the parameters of the ramp in the manual operation, as well as the
external references of speed.
Parameter Name Min/Max Value Typical Value Description
Speed ref. selected by digital input
LIVE E1 % 0.00 / 650.00 W 0.00
04
Speed ref. selected by digital input
LIVE E2 % 0.00 / 650.00 W 0.00
05
Speed ref. selected by digital input
LIVE E3 % 0.00 / 650.00 W 0.00
06
Speed ref. selected by digital input
LIVE E4 % 0.00 / 650.00 W 0.00
07
Hysteresis for oscillation with
IstLIVE E2 % 0.00 / 650.00 W 0.00
LiveE2 selected (Washing)
Hysteresis for oscillation with
IstLIVE E3 % 0.00 / 650.00 W 0.00
LiveE3 selected (Purging)
Current limit enabled from outside
ExtCurrLim% 0.10 / 650.00 W 50.00
dig. 02
Dec Amp/ms 1 / 65000 W 1 Current limit decrease ramp
Inc Amp/s 1 / 65000 W 10 Current limit increase ramp
Reference increase by command
Inc LiveMan 0.1 / 3200.0 W 10.0
UP dig. 12
Reference decrease by command
Dec LiveMan 0.1 / 3200.0 W 10.0
DOWN dig. 13
Acc.Man Rps 1 / 9000 W 5 Acceleration in manual mode
Dec.Man Rps 1 / 9000 W 5 Deceleration in manual mode
BlkStart s 1 / 9000 W 5 Acceleration for Blackstart
In the manual mode there is only one acceleration and only one deceleration, so it’s impossible
to create a profile that change with the speed.
The external references have an hysteresis to avoid continuous changes of the signalling
because of possible oscillations around the value of reference. An example of hysteresis is the
following:
Parameter Parameter
+
hysteresis
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 56/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
As can be observed by the figure above, the flag it will change when the input will assume a
greater value than the parameter plus the hysteresis and it will return to the initial value when
the input signal will assume a smaller value than the parameter inserted. In this way is possible
to avoid continuous changes when is present an oscillations on the signal.
The external references are able by the corresponding digital input, a flag indicate that the
speed it has been reached. Also the various speed reference selected is indicated by a flag.
These function can be schematized in the figure below:
Rive _
Live E2 rpm Rampa
Digital Input 5
Reve
The speed reference Live E2 rpm can be selected by the digital input 5, the falg Iref2 shows the
selection, when the feedback (REVE) reachs the reference, the output W2RCH will be on.
The various flagses will be explained in the flags list.
The parameters:
- Ext Curr. Lim%
- Dec Amp/ms
- Inc Amp/s
are used when the Ext Curr.Lim% is enable with the digital input 2. When the digital input 2 is on
the Curr.Lim change as the chart below:
Increase Ramp
Inc Amp/s
Decrease Ramp
Dec Amp/ms
Internal Curr.Lim
Curr.Limit
Current
Ext. Curr.Lim
Limite interno
Ext. Curr. Lim = ON Ext. Curr. Lim = OFF
As soon as input 2 becomes ON the Current Limit becomes equal to the current and after that
decreases with the ramp (Dec Amp/ms). When the input 2 becomes OFF the current limit
increases with the ramp (Inc Amp/s).
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 57/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: AUTOM. RAMP
This menu contains all the necessary parameters to define the accelerations in the motor and
generator operation.
Parameter Name Min/Max Value Typical Value Description
Acceleration from zero to parameter
ACC.1 Forw. 1 / 32000 W 4
Speed1 % (forward)
Acceler. from Speed1% to parameter
ACC.2 Forw. 1 / 32000 W 6
Speed2% (forward)
Acceler. from Speed2% to parameter
ACC.3 Forw. 1 / 32000 W 6
Speed3% (forward)
Acceleration from Speed3% to 125%
ACC.4 Forw. 1 / 32000 W 7
(forward)
Acceleration from zero to parameter
ACC.1 Back. 1 / 32000 W 4
Speed1 % (reverse)
Acceler. from Speed1% to parameter
ACC.2 Back. 1 / 32000 W 6
Speed2% (reverse)
Acceler. from Speed2% to parameter
ACC.3 Back. 1 / 32000 W 6
Speed3% (reverse)
Acceleration from Speed3% to 125%
ACC.4 Back. 1 / 32000 W 7
(reverse)
Speed threshold for ramp
SPEED 1 % 0.00 / 650.00 W 10.00
gradient change
Speed threshold for ramp gradient
SPEED 2 % 0.00 / 650.00 W 40.00
change
Speed threshold for ramp gradient
SPEED 3 % 0.00 / 650.00 W 90.00
change
Deceleration from zero to parameter
DECEL.1 F/B 1 / 32000 W 7
Speed1%
Deceleration from Speed%1 to
DECEL.2 F/B 1 / 32000 W 7
Speed2%
Deceleration from Speed2% to
DECEL.3 F/B 1 / 32000 W 7
Speed3%
DECEL.4 F/B 1 / 32000 W 7 Deceleration from Speed3% to 125%
A typical example is represented by the graph below:
Acceleration
Acc4
Legend:
1 Speed1 %
2 Speed2 %
3 Speed3 %
N Nominal Speed
Acc2/Acc3 Acc1 Acc.1Forw
Acc2 Acc.A 2Forw
Acc3 Acc.A 3Forw
Acc4 Acc.A 4Forw
Acc1
Speed
1 2 3 125%
N = 100%
The acceleration and deceleration characteristics in the generator operation are similar.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 58/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: CURRENT LIMIT MOT
This menu is used to define the current limits during the motor operation.
Parameter Name Min/Max Value Typical Value Description
Speed threshold for current limit
SPEED 1 % 0.00 / 650.00 W 10.00
recalibration
Speed threshold for current limit
SPEED 2 % 0.00 / 650.00 W 50.00
recalibration
Speed threshold for current limit
SPEED 3 % 0.00 / 650.00 W 70.00
recalibration
Speed threshold for current limit
SPEED 4 % 0.00 / 650.00 W 80.00
recalibration
Speed threshold for current limit
SPEED 5 % 0.00 / 650.00 W 100.00
recalibration
Speed threshold for current limit
SPEED 6 % 0.00 / 650.00 W 103.00
recalibration
Speed threshold for current limit
SPEED 7 % 0.00 / 650.00 W 110.00
recalibration
CURR.LIM. 1 % 0.00 / 650.00 W 30.00 Current limit from zero to Speed 1
CURR.LIM. 2 % 0.00 / 650.00 W 60.00 Current limit at Speed 2
CURR.LIM. 3 % 0.00 / 650.00 W 100.00 Current limit at Speed 3
CURR.LIM. 4 % 0.00 / 650.00 W 100.00 Current limit at Speed 4
CURR.LIM. 5 % 0.00 / 650.00 W 100.00 Current limit at Speed 5
CURR.LIM. 6 % 0.00 / 650.00 W 0.00 Current limit at Speed 6
CURR.LIM. 7 % 0.00 / 650.00 W 0.00 Current limit at Speed 7
A typical current limit characteristic:
Current
Legend:
1 Speed1 %
Lc4 2 Speed2 %
Lc5 3 Speed3 %
4 Speed4 %
5 Speed5 %
Lc3 6 Speed6 %
7 Speed7 %
Lc1 CurrLim1 %
Lc2 CurrLim2 %
Lc3 CurrLim3 %
Lc4 CurrLim4 %
Lc5 CurrLim5 %
Lc2
Lc6 CurrLim6 %
Lc7 CurrLim7 %
Lc1
Lc6/Lc7
Speed
1 2 3 4 5 6 7 125%
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 59/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: ANGLE REGUL. MOT
This menu is used to define the inverter firing angle characteristic during the motor operation.
Parameter Name Min/Max Value Typical Value Description
Preset RP 100 / 160 W 135 Preset angle in pulsing mode
Filter on inverter bridge angle
ANGLE Flt 1 / 10 W 1
calculation
Speed threshold for angle
SPEED 1 % 0.00 / 650.00 W 10.00
recalibration
Speed threshold for angle
SPEED 2 % 0.00 / 650.00 W 50.00
recalibration
Speed threshold for angle
SPEED 3 % 0.00 / 650.00 W 70.00
recalibration
Speed threshold for angle
SPEED 4 % 0.00 / 650.00 W 80.00
recalibration
Speed threshold for angle
SPEED 5 % 0.00 / 650.00 W 100.00
recalibration
Speed threshold for angle
SPEED 6 % 0.00 / 650.00 W 103.00
recalibration
ANGLE 1 100 / 160 W 136 Angle from zero to Speed 1
ANGLE 2 100 / 160 W 141 Angle at Speed 2
ANGLE 3 100 / 160 W 136 Angle at Speed 3
ANGLE 4 100 / 160 W 128 Angle at Speed 4
ANGLE 5 100 / 160 W 119 Angle at Speed 5
ANGLE 6 100 / 160 W 110 Angle at Speed 6
A typical firing angle characteristic:
Degrees
Legend:
Agl 2 1 Speed1 %
2 Speed2 %
3 Speed3 %
4 Speed4 %
Agl 3 5 Speed5 %
6 Speed6 %
Agl1 ANGLE1
Agl 1 Agl2 ANGLE2
Agl3 ANGLE3
Agl4 ANGLE4
Agl 4 Agl5 ANGLE5
Agl6 ANGLE6
Agl 5
Agl 6
Speed
1 2 3 4 5 6
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 60/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: CURRENT LIMIT GEN
This menu is used to define the current limits during the generating operation.
Parameter Name Min/Max Value Typical Value Description
Speed threshold for current limit
SPEED 1 % 0.00 / 650.00 W 10.00
recalibration
Speed threshold for current limit
SPEED 2 % 0.00 / 650.00 W 50.00
recalibration
Speed threshold for current limit
SPEED 3 % 0.00 / 650.00 W 70.00
recalibration
Speed threshold for current limit
SPEED 4 % 0.00 / 650.00 W 80.00
recalibration
Speed threshold for current limit
SPEED 5 % 0.00 / 650.00 W 100.00
recalibration
Speed threshold for current limit
SPEED 6 % 0.00 / 650.00 W 103.00
recalibration
Speed threshold for current limit
SPEED 7 % 0.00 / 650.00 W 110.00
recalibration
CURR.LIM. 1 % 0.00 / 650.00 W 50.00 Current limit from zero to Speed 1
CURR.LIM. 2 % 0.00 / 650.00 W 50.00 Current limit at Speed 2
CURR.LIM. 3 % 0.00 / 650.00 W 50.00 Current limit at Speed 3
CURR.LIM. 4 % 0.00 / 650.00 W 50.00 Current limit at Speed 4
CURR.LIM. 5 % 0.00 / 650.00 W 50.00 Current limit at Speed 5
CURR.LIM. 6 % 0.00 / 650.00 W 50.00 Current limit at Speed 6
CURR.LIM. 7 % 0.00 / 650.00 W 50.00 Current limit at Speed 7
A typical current limit characteristic:
Current
Legend:
1 Speed1 %
2 Speed2 %
3 Speed3 %
4 Speed4 %
Lc1 5 Speed5 %
6 Speed6 %
Lc2 7 Speed7 %
Lc1 CurLim1 %
Lc3 Lc2 CurLim2 %
Lc3 CurLim3 %
Lc4 Lc4 CurLim4 %
Lc5 Lc5 CurLim5 %
Lc6 CurLim6 %
Lc7 CurLim7 %
Lc6/Lc7
Speed
1 2 3 4 5 6 7 125%
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 61/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: ANGLE REGUL. GEN
This menu is used to define the inverter firing angle characteristic during the generating operation.
Parameter Name Min/Max Value Typical Value Description
Com. Brake 0/1 W 0 Emergency braking enabling
Din. Brake 0/1 W 0 Dynamic braking enabling
Filter on inverter bridge angle
Angle FLT 1 / 10 W 1
calculation
Speed threshold for angle
SPEED 1 % 0.00 / 650.00 W 10.00
recalibration
Speed threshold for angle
SPEED 2 % 0.00 / 650.00 W 50.00
recalibration
Speed threshold for angle
SPEED 3 % 0.00 / 650.00 W 70.00
recalibration
Speed threshold for angle
SPEED 4 % 0.00 / 650.00 W 80.00
recalibration
Speed threshold for angle
SPEED 5 % 0.00 / 650.00 W 100.00
recalibration
Speed threshold for angle
SPEED 6 % 0.00 / 650.00 W 103.00
recalibration
ANGLE 1 5 / 85 W 40 Angle from zero to Speed 1
ANGLE 2 5 / 85 W 40 Angle at Speed 2
ANGLE 3 5 / 85 W 40 Angle at Speed 3
ANGLE 4 5 / 85 W 40 Angle at Speed 4
ANGLE 5 5 / 85 W 40 Angle at Speed 5
ANGLE 6 5 / 85 W 40 Angle at Speed 6
The parameters Brake and Din. Brake allow to recovery energy to the incoming line when the
motor decelerate (Din. Brake) or when brake (Brake). When Din. brake is 0 the machine decrease
its speed per inertia until there is an emergency brake (Brake = 1).
For the plant in examination the angle assumes this values:
Angle Legend:
1 Speed1 %
2 Speed2 %
3 Speed3 %
Agl1 4 Speed4 %
Agl2 5 Speed5 %
6 Speed6 %
Agl3 Agl1 Angle1
Agl4 Agl2 Angle2
Agl5 Agl3 Angle3
Agl4 Angle4
Agl6
Agl5 Angle5
Agl6 Angle6
Speed
1 2 3 4 5 6
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 62/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: REGULATOR GAIN
This menu is used to define the speed regulator parameters.
Parameter Name Min/Max Value Typical Value Description
Proportional gain of regulator from
PROP.GAIN1 1 / 65000 W 4000
zero to Speed1
Proportional gain of regulator over
PROP.GAIN2 1 / 65000 W 2000
Speed2
Integral gain of regulator from zero to
INT.GAIN1 0 / 65000 W 13000
Speed1
INT.GAIN2 0 / 65000 W 5000 Integral gain of regulator over Speed2
SPEED1 % 0.00 / 650.00 W 100.0 Speed threshold for regulator gain
SPEED2 % 0.00 / 650.00 W 160.0 Speed threshold for regulator gain
NOM.CURRENT 1 / 65000 W 1450.0 Nominal operating current
NOM.SPEED 1 / 65000 W 3000.0 Nominal motor speed
Error threshold on mot./gen. passage
DELTAGEN % 0.10 / 650.00 W 5.00
current error
Filter for current limit Parameter x
CUR.LIM.Flt 1 / 65000 W 100
1ms
Current threshold used to enable
ABIL.AMOT% 0.20 / 650.00 W 3.00
AMOT card
Xintegrale 1 / 65000 W 10 Multiplier for integral gain
The parameters that can be inserted concern the constants of the proportional and integral
actions of the speed regulator. As can be noticed by the chart, it can be inserted several
constant at different speed. Another important parameter is DeltaGen A that it represents a
threshold of current necessary to discriminate the generator operation from motor operation.
A typical characteristic gain-speed :
gain
Kp2
Legend:
1 Speed1 %
2 Speed2 %
Kp1 Prop.Gain1
Kp2 Prop.Gain2
Ki1 Int.Gain1
Ki2 Int.Gain2
Ki2
Kp1
Ki1
Speed
1 2
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 63/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Another important parameter is CUR. LIM. Flt that consists of a filter inserted on the current
limit. It is used to have a sweet current at the start up. The chart below represents the time
constant that corresponds to the parameter:
Current limit
CUR.LIM.Flt
5 xCUR.LIM.Flt
After 5xCUR.LIM.Flt the filter is equal to the current limit. This filter is always inserted and it is
forced to zero at the start up or when there is the passage from motor mode to generator mode.
The parameter Xintegrale is used to increase/decrease rapidly the integral action when the speed
error changes its sign.
Xintegrale
used
Proportional action
Integral action
+ Deltagen
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 64/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: SETUP THRESHOLD
This menu is used to set the speed threshold to define the different phase of operation.
Parameter Name Min/Max Value Typical Value Description
LIVE Min% 0.00 / 650.00 W 1.00 Lower speed reference limit
LIVE Max % 0.00 / 650.00 W 100.00 Maximum speed reference limit
Preset Man % 0.00 / 650.00 W 1.00 Reference presetting in manual mode
Pulse enabling if
1LiveRive> % 0.00 / 650.00 W 0.33
(Live && Rive) > (1LiveRive)
W=0% 0.00 / 650.00 W 1.00 Speed threshold for digital output 01
Speed hysteresis for parameter
Ist W0 % 0.00 / 650.00 W 0.67
W=0%
WRpCn % 0.00 / 650.00 W 10.00 Speed threshold for RP - CN passage
Speed hysteresis for parameter W
Ist RpCn % 0.00 / 650.00 W 0.67
RpCn
Speed threshold for exciter regulator
W > 15% 0.00 / 650.00 W 15.00
V/Hz
Speed hysteresis for parameter Ist
Ist W >15% 0.00 / 650.00 W 0.67
W>15%
W > SPEED 1 % 0.00 / 650.00 W 25.00 Speed threshold for digital output 02
W > SPEED 2 % 0.00 / 650.00 W 50.00 Speed threshold for digital output 05
W > SPEED 3 % 0.00 / 650.00 W 75.00 Speed threshold for digital output 06
W > SPEED 4 % 0.00 / 650.00 W 100.00 Speed threshold for digital output 10
Speed hysteresis for parameter
Ist W>SPEED % 0.00 / 650.00 W 1.00
W>SPEED %
The parameter 1LiveRive> is used to enable the output signal RICO%. When the speed reach the
value set by the parameter W RpCn the operation of the regulator passes from pulse regim to
natural commutation. The suppression of the pulses happens instead through the parameter
W = 0%. The following figure shows the regulator operation:
W RpCn + Ist Rive
RpCn Reve
W =0
1LiveRiv
e
Natural commutation
Turn off
regulator
Enable regulator
Each speed parameter have an hysteresis that permit to the regulator to work properly.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 65/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: I2T Protection
The protection I2T is used for avoiding overheatings to the machine.
Parameter Name Min/Max Value Typical Value Description
SPEED 1 % 0.00 / 650.00 W 20.00 Speed threshold for current limit
SPEED 2 % 0.00 / 650.00 W 30.00 Speed threshold for current limit
SPEED 3 % 0.00 / 650.00 W 50.00 Speed threshold for current limit
SPEED 4 % 0.00 / 650.00 W 75.00 Speed threshold for current limit
SPEED 5 % 0.00 / 650.00 W 90.00 Speed threshold for current limit
SPEED 6 % 0.00 / 650.00 W 100.00 Speed threshold for current limit
SPEED 7 % 0.00 / 650.00 W 103.00 Speed threshold for current limit
CURR.LIM. 1 % 0.00 / 650.00 W 30.00 Current limit to SPEED 1%
CURR.LIM. 2 % 0.00 / 650.00 W 70.00 Current limit at SPEED 2%
CURR.LIM. 3 % 0.00 / 650.00 W 100.00 Current limit at SPEED 3%
CURR.LIM. 4 % 0.00 / 650.00 W 100.00 Current limit at SPEED 4%
CURR.LIM. 5 % 0.00 / 650.00 W 100.00 Current limit at SPEED 5%
CURR.LIM. 6 % 0.00 / 650.00 W 100.00 Current limit at SPEED 6%
CURR.LIM. 7 % 0.00 / 650.00 W 100.00 Current limit at SPEED 7%
In this menu is possible to set the current limit to avoid to overload the machine during the
operation. The overload is calculated by the formula below:
I
2
I t statore
2
1dt
Ilimitestatore
Where:
Istatore = stator current
Ilimite-statore = stator current limit (CurrLim)
I2t = overload area
The relationship between the stator current and its limit is the overload (OVL)
For example:
If the motor have an overload possible of 150% for 30s (tOVL), the area I2t will be:
I2tTRIP = (OVL2 – 1)tOVL= (1.52 -1) x 30 = 37,5
Therefore it’s possible to calculate the max time for the overload:
I2 t TRIP
t
OVL2 1
The characteristic is inversely proportional with the overload value.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 66/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
An example of the relationship between overload and time of intervention is represented by the
following graph:
overload
CURVA DI SOVRACCARICO
10000
1000
t [s]
100
10
1 1,05 1,1 1,15 1,2 1,25 1,3 1,35 1,4 1,45 1,5
OVL [p.u.]
Knowing the value of the admitted area and calculating the percentage of overload is possible to
define the time of intervention of the protection.
The thermal protection is modified in base to the speed of rotation, because the ability of cooling
comes to be reduced at low speeds.
A typical characteristic current limit-speed :
Curr3/Curr4
Curr5 Legend:
Curr6/Curr7 1 Speed1 %
2 Speed2 %
Curr2 3 Speed3 %
4 Speed4 %
5 Speed5 %
6 Speed6 %
7 Speed7 %
Curr1 CurrLim1%
Curr2 CurrLim2%
Curr3 CurrLim3%
Curr4 CurrLim4%
Curr1
Curr5 CurrLim5%
Curr6 CurrLim6%
Curr7 CurrLim7%
ω1 ω2 ω3 ω4 ω5 ω6 ω7 125%
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 67/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: Exc CURR.LIM
The protection I2T is used for avoiding overheating to the rotor of the machine.
Parameter Name Min/Max Value Typical Value Description
SPEED 1 % 0.00 / 650.00 W Speed threshold for current limit
SPEED 2 % 0.00 / 650.00 W Speed threshold for current limit
SPEED 3 % 0.00 / 650.00 W Speed threshold for current limit
SPEED 4 % 0.00 / 650.00 W Speed threshold for current limit
SPEED 5 % 0.00 / 650.00 W Speed threshold for current limit
SPEED 6 % 0.00 / 650.00 W Speed threshold for current limit
SPEED 7 % 0.00 / 650.00 W Speed threshold for current limit
CURR.LIM. 1 % 0.00 / 650.00 W Current limit to SPEED 1%
CURR.LIM. 2 % 0.00 / 650.00 W Current limit at SPEED 2%
CURR.LIM. 3 % 0.00 / 650.00 W Current limit at SPEED 3%
CURR.LIM. 4 % 0.00 / 650.00 W Current limit at SPEED 4%
CURR.LIM. 5 % 0.00 / 650.00 W Current limit at SPEED 5%
CURR.LIM. 6 % 0.00 / 650.00 W Current limit at SPEED 6%
CURR.LIM. 7 % 0.00 / 650.00 W Current limit at SPEED 7%
Likewise to the preceding menu also this menu represents the thermal protection but this menu
concern of the rotor of the machine.
Menu: TESTING
This menu is used to test the speed regulator.
Parameter Name Min/Max Value Typical Value Description
StepW % 0.00 / 650.00 W 0.0 Speed step value for test.
TimeW sec 0.0 / 600.0 W 0.0 Step time duration on reference.
Current percentage for short circuit
CurRef % 0.00 / 100.00 W 0.0
test
Frequ. Hz 0.1 / 2.0 W 0.1 Inverter bridge switching frequency
AREA S A2T 0.1 / 6500.0 W 37.5 Area for I2T stator protection
Int.Gain S 0 / 65000 W 1 Gain for stator protection
AREA R A2T 0.1 / 6500.0 W 37.5 Area for I2T rotor protection
Int.Gain R 0 / 65000 W 1 Gain for rotor protection
Minimum speed for stator I2T
I2T ab.% 0.00 / 650.00 W 10.00
abilitation
Minimum speed for rotor I2T
I2Te En % 0.00 / 650.00 W 10.00
abilitation
P.MaxSpeed % 0.00 / 650.00 W 110.00 Max speed protection
REVE W0 % 0.00 / 650.00 R Reve without offset
REVEoffset % 0.00 / 650.00 W 0.00 Offset for Reve
Ntg % 0.00 / 650.00 R Integral action
Prop % 0.00 / 650.00 R Proportional action
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 68/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Through this menu is possible to carry out the following tests:
answered to the step
Short circuit test
I2T protections
Max speed protection
The parameters AREA S A2T & AREA R A2T are used to define the overload area for the I2T
protection (37,5 means 150% of overload for 30s). The parameters I2T ab.% I2Te En% and
P.MaxSpeed enable the protections.
The answer to the step is verified with the parameters StepW and TimeWsec that go to work on
the signal of the regulator (RiveReg).
The parameters Ntg % and Prop % are the actions of the regulator.
The Flags are used for monitoring the regulator operation and enable the function available.
Also for the flags are present several menu, explained below:
CONTROL Function available
STATUS Status variable
INP_EXT1 External input for enabling function
IN_AINT1 Input signals AINT02
IN_ACPU1 Input signals ACPU02
OUT_EXT1 Output
OU_AINT1 Output AINT02
OU_AINT2 Output AINT02
OU_ACPU1 Output ACPU02
OU_ACPU2 Output ACPU02
Menu: CONTROL
Parameter Name Min/Max Value Value Description
Clear Stp / Go W Reserved.
deFlt Stp / Go W Default parameter restoration.
Enabling of parameter saving in
Msave Stp / Go W
EEPROM.
Bbox Stp / RUN W Black Box enabling.
Regol Man / Aut W Manual or Automatic operation mode.
Speed step enabling displaying for
STEP OFF / ON W
tests.
Short circuit test enabling, current
Dcurr Stp / Go W
reference.
Speed step enabling displaying for
Dstpw Stp / Go W
tests.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 69/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: STATUS
Parameter Name Min/Max Value Value Description
Test Stp / Go R EEPROM error– [2] on Led ACPU02
Trip Stp / Go R Operation blocking– [1] on Led ACPU02
Sopp Stp / Go R Stop operation – [S] on Led ACPU02
Motor running adjustment – [M] on Led
RegMA Stp / RUN R
ACPU02
RegMI Man / Aut R Not Available
Generator running adjustment– [G] on
RegGA OFF / ON R
Led ACPU02
RegGI Stp / Go R Not Available.
LmCor Stp / Go R Current limit reached
ErPar OFF / ON R Available
Aint1 OFF / ON R AINT02 card error – [1] on Led ACPU02
W0 OFF / ON R Inner signal for W = 0%
Rp-cn OFF / ON R Inner signal for RP – CN passage
AbReg OFF / ON R Speed regulator enabling
AbFv OFF / ON R Inverter bridge angle regulator enabling
AbRam OFF / ON R Ramp enabling
----- OFF / ON R Not Available
Menu: INP_EXT1
Parameter Name Min/Max Value Value Description
Start OFF / ON R Run signal
Fixed current limit enabling - parameter
Lmcr1 OFF / ON R
ExtCurr.Lim% (menu ExtRef+ManRamp)
Analog reference enabling – LIVEAnalog%
Aref1 OFF / ON R
(menu ANALOG.INP.1)
Inner reference enabling - LiveE1% (menu
Iref1 OFF / ON R
ExtRef+ManRamp)
Inner reference enabling – LiveE2% (menu
Iref2 OFF / ON R
ExtRef+ManRamp)
Inner reference enabling – LiveE3% (menu
Iref3 OFF / ON R
ExtRef+ManRamp)
Inner reference enabling – LiveE4% (menu
Iref4 OFF / ON R
ExtRef+ManRamp)
Brush OFF / ON R Inner reference enabling – switch brush
/F--R OFF / ON R 0 = Forward / 1 = Reverse
Slow ramp enabling - BlkStart s (Menu
BlkSt OFF / ON R
AUTOM. RAMP)
Hramp OFF / ON R Ramp stop
Up OFF / ON R Speed increase by digital command
Down OFF / ON R Speed decrease by digital command
Brake OFF / ON R Emergency braking
Aut OFF / ON R 0= Automatic / 1= Manual
0= rotor detection enable / 1= rotor
Ricro OFF / ON R
detection disable
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 70/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: IN_AINT1
Parameter Name Min/Max Value Value Description
1TM01 OFF / ON R Maximum line voltage
1TM02 OFF / ON R Minimum line voltage
Maximum generator voltage
1TM03 OFF / ON R
(conv.1)
Maximum converter current
1TM04 OFF / ON R
(conv.1)
1TM05 OFF / ON R Maximum motor current (conv.1)
1TM06 OFF / ON R Current differential (conv.1)
Resrv OFF / ON R Reserved
Resrv OFF / ON R Reserved
1TM07 OFF / ON R Available
1TM08 OFF / ON R Available
Maximum generator voltage
1TM09 OFF / ON R
(conv.2)
Maximum converter current
1TM10 OFF / ON R
(conv.2)
1TM11 OFF / ON R Maximum motor current (conv.2)
1TM12 OFF / ON R Current differential (conv.2)
Resrv OFF / ON R Reserved
Resrv OFF / ON R Reserved
Menu: IN_ACPU1
Parameter Name Min/Max Value Value Description
1 LCN OFF / ON R Natural switching limit
Converter blockage –hardware
1TRIP OFF / ON R
protection
Command for pulse backing to
0 ARL OFF / ON R
limit delay
ABREG OFF / ON R Regulator enabling
ArSop OFF / ON R Converter pulses suppressed
Disp5 OFF / ON R Available
Resrv OFF / ON R Reserved
Resrv OFF / ON R Reserved
1TM13 OFF / ON R Available
1TM14 OFF / ON R Available
1TM15 OFF / ON R Available
1TM16 OFF / ON R Available
1TM17 OFF / ON R Available
1TM18 OFF / ON R Available
Resrv OFF / ON R Reserved
Resrv OFF / ON R Reserved
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 71/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: OUT_EXT1
Parameter Name Min/Max Value Value Description
Output to 1 when speed is equal to
W=0 OFF / ON W W = 0 + Ist W0
W=0
Output to 1 when speed is >
W > SPEED1% + parameter W > SPEED1% +
W1RCH OFF / ON W
Ist W>SPEED% IstwSPEED% (menu SETUP
THRESHOLD)
Output to 1 when speed is > param.
LIVE E2% +
W2RCH OFF / ON W LiveE2% + IstLIVEE2% (menu
IstLIVEE2%
ExtRef+ManRamp)
Output to 1 when speed is > param.
LIVE E3% +
W3RCH OFF / ON W LiveE3% + IstLIVEE3% (menu
IstLIVEE3%
ExtRef+ManRamp)
Output to 1 when speed is >
W > SPEED2% +
W4RCH OFF / ON W parameter W > SPEED2% +
Ist W>SPEED%
IstwSPEED%
Output to 1 when speed is >
W > SPEED3% +
W5RCH OFF / ON W parameter W > SPEED3% +
Ist W>SPEED%
IstwSPEED%
I2T Output to 1 when stator thermal
I2T S OFF / ON W
PROTECTION protection is ON
I2T Output to 1 when rotor thermal
I2T R OFF / ON W
PROTECTION protection is ON
Output to 1 when speed is > LIVE
W =LIVE InpAn. +
Wpot OFF / ON W InpAn. + Ist W>15% (menu
1st W>15%
ANALOG.INP.1)
Output to 1 when speed is >
W > SPEED4% +
W6RCH OFF / ON W parameter W > SPEED4% +
Ist W>SPEED%
IstwSPEED%
Output to 1 when the converter1 is
DIFC1 OFF / ON W
in current differential
Output to 1 when the line voltage is
MXVL2 OFF / ON W
> 1TM09 (menu IN_AINT1)
Output to 1 when the converter2 is
MXIC2 OFF / ON W
in current limit
Output to 1 when the converter2 is
DIFC2 OFF / ON W
in current differential
Output to 1 when the generator
MXVMT OFF / ON W
voltage is > 1TMXX
Output to 1 when the exciter is in
P-EXC OFF / ON W
protection mode
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 72/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: OU_AINT1
Parameter Name Min/Max Value Typical Value Description
X synchronism simulation for short circuit
1X OFF / ON W
test
Y synchronism simulation for short circuit
1Y OFF / ON W
test
Z synchronism simulation for short circuit
1Z OFF / ON W
test
Electronic circuit enabling for short-circuit
0AbPr OFF / ON W
test
Maximum pick-up time protection de-
0Mxst OFF / ON W
enabling
Disp5 OFF / ON W Available
Disp6 OFF / ON W Available
Disp7 OFF / ON W Available
Output to 1 when speed is > P.MaxSpeed
PSpMx OFF / ON W
(menu TESTING)
Output to 1 when the rotor detection is
1RicR OFF / ON W
enable
Amot OFF / ON W Output to 1 when Amot card is enable
Brush OFF / ON W Brush position 1
Disp4 OFF / ON W Available
Disp5 OFF / ON W Available
Disp6 OFF / ON W Available
Disp7 OFF / ON W Available
Menu: OU_AINT2
Parameter Name Min/Max Value Typical Value Description
Disp0 OFF / ON W Not Available
Disp1 OFF / ON W Not Available
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 73/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: OU_ACPU1
Parameter Name Min/Max Value Typical Value Description
Bit for inverter bridge angle with
Bit 0 OFF / ON W
weight 1°
Bit for inverter bridge angle with
Bit 1 OFF / ON W
weight 2°
Bit for inverter bridge angle with
Bit 2 OFF / ON W
weight 4°
Bit for inverter bridge angle with
Bit 3 OFF / ON W
weight 8°
Bit for inverter bridge angle with
Bit 4 OFF / ON W
weight 16°
Bit for inverter bridge angle with
Bit 5 OFF / ON W
weight 32°
Bit for inverter bridge angle with
Bit 6 OFF / ON W
weight 64°
Bit for inverter bridge angle with
Bit 7 OFF / ON W
weight 128°
Inverter bridge angle acquisition
0ABan OFF / ON W
enabling
0Marc OFF / ON W 0 run command
1Marc OFF / ON W 1 run command
1 speed lower than W RpCn (menu
1W<10 OFF / ON W
SETUP THRESHOLD)
1 speed higher than W RpCn (menu
0W<10 OFF / ON W
SETUP THRESHOLD)
1 speed lower than W = 0 (menu
1 W=0 OFF / ON W
SETUP THRESHOLD)
1 speed higher than W = 0 (menu
0 W=0 OFF / ON W
SETUP THRESHOLD)
Disp7 OFF / ON W Available
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 74/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Menu: OU_ACPU2
Parameter Name Min/Max Value Typical Value Description
1 Mot OFF / ON W 1 working by motor
1Wav OFF / ON W 1 forward running
1 higher references 1LiveRive>
1L-R> OFF / ON W
(menu SETUP THRESHOLD)
1 lower references 1LiveRive>
0L-R> OFF / ON W
(menu SETUP THRESHOLD)
0SReg OFF / ON W 0 current regulator disable
1SReg OFF / ON W 1 current regulator disable
1 higher references W > 15%
1W>15 OFF / ON W
(menu SETUP THRESHOLD)
1 lower references W > 15%
0W>15 OFF / ON W
(menu SETUP THRESHOLD)
Resvr OFF / ON W Reserved
Resvr OFF / ON W Reserved
Resvr OFF / ON W Reserved
Resvr OFF / ON W Reserved
Resvr OFF / ON W Reserved
Resvr OFF / ON W Reserved
Resvr OFF / ON W Reserved
Resvr OFF / ON W Reserved
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 75/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.5 ANALYSIS OF FAILURE IN SERVICE
1.5.1 Medium voltage switchboards
1.5.1.1 Repairs for faulty operation
Repairs for fault operation should not be necessary (other than in the case of
electric or mechanical wear of the components) if maintenance is carried out
efficiently. The system is correct if installation of the equipment complies with the
limits declared by the Manufacturer.
In general, the most frequent repair is the replacement of the signalling lamps.
FAULT CAUSE REMEDY
Inefficient tightening of the:
Buzzing in the metal Check that the sheet plates and
structure - segregation sheet plate
panels are properly tightened
- external panels
High room temperature Lower the room temperature
Inefficient tightening of the:
- bus-bar joints Check that the joints, shunts and
- shunts terminals are correctly tightened
Excessive heating
- power circuit connections
Check the pressure of the
Disconnecting contacts disconnecting contacts, clean and
grease
User overload Reduce the user overload
Use an anti-condensation heating
Condensation Inefficient cooling
element
Circuit-breakers, See the relevant operating,
Disconnectors switch installation and maintenance
Faulty operation or instructions
line disconnecting switch Find the fault by referring to the
failure of the
equipment Various components operating diagram of the
Automatic devices switchboard
Auxiliary power supply beyond the
Signalling permitted limits
Activation of the power fuse Replace
Find the faulty
the cause andcomponent
replace theand
fuses
Auxiliary power supply failure Restore the auxiliary power supply
Improper opening of
Check the pressure of the main
the circuit-breakers, Overheating
contacts, clean and grease
switch Check the rating of the protection
disconnectors Incorrect co-ordination of the
protections against the selectivity diagrams of
the system
Protection fault Replace or repair the protections
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 76/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.5.2 Static frequency converter
1.5.2.1 Protections and trouble shooting (look maintenance part)
1.5.3 General
During the initialization phase (i.e. at the power On or after a CPU reset) tests are
performed in order to check the peripheral status:
RAM, EEPROM memories, cards inserted on the bus and the parameter consistency.
The tripping of a protection causes a delay limit backing of the converter firing pulses (with
subsequent pulse suppression once the current is nullified) and the opening of the network
switch.
We distinguish:
Protections realized through electronic circuits located in the control (Hardware).
Test performed through Software.
Protections realized by relay logic or PLC.
All protections are stored.
1.5.4 Initial test
The initial tests performed by the program of the ACPU02 microcontroller card are:
Performed test Possible cause - Action
Cause
Pins not properly inserted
RAM test failed. Faulty RAMs
Action
Replace the card.
Cause
Faulty card or C
MICRO test failed.
Action
Replace the card.
Cause
Card presence test failed. Test failed due to AINT02 card.
On the frontal LCD the number will be Action
displayed (1). Replace the card or make sure that it is properly inserted
in the bus.
Cause
Loading of the default parameters at the first
Parameter consistency test failed. Eeprom writing
On the frontal LCD the number will be Action
displayed (2) If it is the first time that the memory is written, it is
sufficient to change through SSD Term Flags-Control-
Msave.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 77/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.5.5 Hardware protections
All hardware protections are realized with electronic comparators tripping at the voltage
thresholds that can be calibrated by means of resistors.
All protections are stored to the APROT3 card and displayed through a DISPLAY.
Five digital signal on the output of the cards APROT3 indicate which protection occurred.
The PLC use these signals to indicate on the message display which fault is occurred.
The table below explain for each digital combination the right meaning.
PROTECTION TABLE
Bit1 Bit2 Bit3 Bit4 Bit5
N. LED
N N N N N
PROTECTION DESCRIPTION MESSAGE
1 2 4 8 16
00 No protection 0 0 0 0 0
01 Interconnection cable fault 1 0 0 0 0
02 Available 0 1 0 0 0
03 Max line voltage 1 1 0 0 0
04 Min line voltage 0 0 1 0 0
05 Max current 1 star 1 0 1 0 0
06 Max current 1 delta 0 1 1 0 0
07 Differential current Υ – Δ 1 1 1 0 0
08 Differential current Idc1<Idc2 0 0 0 1 0
09 Differential current Idc2<Idc1 1 0 0 1 0
10 Max Current motor side 0 1 0 1 0
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 78/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Bit1 Bit2 Bit3 Bit4 Bit5
N. LED
N N N N N
PROTECTION DESCRIPTION MESSAGE
1 2 4 8 16
11 Max motor voltage 1 1 0 1 0
12 Min exciter current 0 0 1 1 0
13 Max exciter current 1 0 1 1 0
14 Wrong motor rotation 0 1 1 1 0
15 Software trip 1 1 1 1 0
16 Max start rotation time 0 0 0 0 1
17 N° 2 Thyristors fault 1 0 0 0 1
18 Speed 52% - Kramer 0 1 0 0 1
Differential current
19 1 1 0 0 1
input transformer
Differential current
20 0 0 1 0 1
output transformer
21 Ground fault 1 0 1 0 1
Max. current high voltage
22 1 1 0 0 1
side input transformer
Max. current high voltage
23 1 1 0 0 1
side output transformer
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 79/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
All control hardware protections are described there under.
CONTROL PROTECTION - CAUSE - ACTION TABLE
LED PROTECTION Possible cause - Action
Cause
The connection cables between the cards XREV.. and AREV..
are interrupted
Interconnection
0 cable fault
Action
Check the connection of the connectors on cards XREV..
and AREV..
Replace the 25-pole cables
Cause
The input voltage exceed the 110% of the rated voltage
(the tripping threshold can be customized on the card APROT3)
Action
2 Max line voltage Check the value of the input voltage by means of an external
transducer.
Check the wiring between TV LEM and XREV.. card
Check the electronic cards that elaborate the voltage signal
(XREV.. - AREV.. - APROT3)
Cause
The input voltage is lower the 90% of the rated voltage
(the tripping threshold can be customized on the card APROT3)
Action
3 Min line voltage Check the real presence of the input voltage by means of an
external transducer.
Check the wiring between TV LEM and XREV.. card
Check the electronic cards that elaborate the voltage signal
(XREV.. - AREV.. - APROT3)
Cause
The input current exceed the 110% of the rated current
(the tripping threshold can be customized on the card APROT3)
rated I'dc = 6V average, trip calibrated at 9.12V 0.1V peak
Action
4 Max current 1 star Check the connection between CT Lem and XREV.. card.
Check the CT Lem power supply.
By means of a multimeter, check the thyristors of the rectifier
bridge; if the thyristor is in short circuit, it is spoiled.
Check the electronic cards that elaborate the voltage signal
(XREV.. - AREV.. - APROT3)
Current peak where the
comparator is calibrated
DC CURRENT 6V
SIGNAL average
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 80/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
LED PROTECTION Possible cause - Action
Max current 1
5 delta
- NOT APPLICABLE
Differential
6 current Υ – Δ
- NOT APPLICABLE
Cause
The difference between the inverter current and the rectifier
current exceed 10% of the rated current.
The tripping threshold can be customized on the card APROT3
Rated I'dc = 6V average, trip calibrated at 0.92V 0.1V
Differential Action
7 current Idc1<Idc2 Check the connection between CT Lem and XREV.. card.
Check the CT Lem power supply.
By means of a multimeter, check the thyristors of the rectifier
bridge; if the thyristor is in short circuit, it is spoiled.
Check the electronic cards that elaborate the voltage signal
(XREV.. - AREV.. - APROT3)
Cause
The difference between the rectifier current and the inverter
current exceed 10% of the rated current.
The tripping threshold can be customized on the card APROT3
Rated I'dc = 6V average, trip calibrated at 0.92V 0.1V
Differential Action
8 current Idc2<Idc1 Check the connection between CT Lem and XREV.. card.
Check the CT Lem power supply.
By means of a multimeter, check the thyristors of the rectifier
bridge; if the thyristor is in short circuit, it is spoiled.
Check the electronic cards that elaborate the voltage signal
(XREV.. - AREV.. - APROT3)
Cause
The inverter current exceed the 125% of the rated current.
The tripping threshold can be customized on the card APROT3
Rated I'dc = 6V average, trip calibrated at 9.12V 0.1V
Action
Max Current
9 motor side
Check the connection between CT Lem and XREV.. card.
Check the CT Lem power supply.
By means of a multimeter, check the thyristors of the rectifier
bridge; if the thyristor is in short circuit, it is spoiled.
Check the electronic cards that elaborate the voltage signal
(XREV.. - AREV.. - APROT3)
Current peak where the
comparator is calibrated
DC CURRENT 6V
SIGNAL average
DC
Current
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 81/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
LED PROTECTION Possible cause - Action
Cause
The output RMS voltage of inverter bridge exceed the 110% of
the rated voltage.
The tripping threshold can be customized on the card APROT3
Rated Vmot = 8V average, trip calibrated at 8.9V 0.1V
Max Motor Action
A Voltage Check the exciter current loop with the excitation system, and the
APROT3 reference setting. (APROT3 – AREV.. – XREV.. –
UA01/2)
Check the connection between TV Lem and XREV.. card.
Check the electronic cards that elaborate the voltage signal
(XREV.. - AREV.. - APROT3)
Cause
This protection is operated if the excitation current decreases
below a pre-set value.
The tripping threshold can be customized on the card APROT3
Min Exciter Rated Iexct = 6V average, trip calibrated at 0,4V 0.1V
b Current Action
Check the exciter current loop with the excitation system, and the
APROT3 reference setting. (APROT3 – AREV.. – XREV.. –
UA01/2)
Check the status of transducer =G3.T01 –UV02.
Cause
The excitation current exceed a pre-set value.
The tripping threshold can be customized on the card APROT3
Rated Iexct = 6V average, trip calibrated at 9,0V 0.1V
Max Exciter
C Current
Action
Check the exciter current loop with the excitation system, and the
APROT3 reference setting. (APROT3 – AREV.. – XREV.. –
UA01/2)
Check the status of transducer =G3.T01 –UV02.
Cause
This protection indicate a turning in an opposite direction of the
motor. It can occur for start up from stand still, for a wrong rotor
detection.
Action
Wrong Motor
d Rotation
Check if the led RD and one between the rotor position leds, on
the card AGIF11, turn on when the exciter current increase at
start.
Check the electronic cards that elaborate the voltage signal
(XREV.. - AREV.. - APROT3)
Check the connection between TV Lem and XREV.. card.
Cause
This protection indicate a damaged of the cards AINT02 –
E Software Trip ACPU02 or the program blocked.
Action
Replace the cards AINT02 – ACPU02
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 82/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
LED PROTECTION Possible cause - Action
Cause
At starting the machine didn’t reached the speed threshold > 1 in
a pre-set time. The protection delay time can be customized on
Max Start the card APROT3.
F Rotation Time Action
Check if the led RD, on the card AGIF11, turn on.
Check the current limit parameters and the acceleration
parameters.
N.2 Thyristors
G fault
- NOT APPLICABLE
Speed < 52%
H Kramer
- NOT APPLICABLE
Differential
L current Input - NOT APPLICABLE
Transformer
Differential
P current Output - NOT APPLICABLE
Transformer
U Ground Fault - NOT APPLICABLE
Max. current
J High voltage side - NOT APPLICABLE
input Transformer
Max. current
High voltage side
11 output
- NOT APPLICABLE
Transformer
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 83/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.5.6 Plc protections
The protections generated by the PLC logic concern all blocks causing a converter
malfunction due to equipment located inside or outside the panel.
Panel internal protections
The panel internal protections summarize the following block causes:
1) from relay logic: local emergency push button (panel front)
24V power supply failure
Reactor maximum temperature
2) from PLC logic: control power supply magneto thermal breaker open
blower power supply magneto thermal/s open
converter blower malfunction (anemometer)
reactor blower malfunction (anemometer)
power supply magneto thermal breaker for high insulation
pulse transformer open
Panel external protection
The panel external protections summarize the following block causes:
1) from relay logic:external emergency
transformer maximum temperature
turbine block
The intervention of one of these blocks result in the converter stop.
1.5.7 Protection Reset
The reset of protections is carried out through - SB01push button ( Reset ) located on the
compartment # 21 door; by pressing the push button, provided that the cause of the failure
has been cleared, the tripped protection signals switch off and the 7 segment display of
ACPU02 card passes from P to S signaling (pulse suppression condition).
The reset push button located on the APROT3 card front allows the reset of protections
limited to the control only (excluding, therefore, the PLC and the relay logic); as a rule, it
has not to be normally used.
Note:the blocks generated by causes external to the control do not enable any led on
APROT3 card therefore the 7 segment led does not pass to P status. The block is
displayed on the HS01 viewer display
1.5.8 Signaling And Diagnostic
The following diagnostic levels are available:
- signaling in HS01control unit
- led on control card fronts
Control unit signalling and led signalling on the control card fronts are visible on the panel
front even with close door.
The led signalling on the interface cards and on the PLC input/output channels are visible
only by opening the control compartment door and rotating the frame on which the
adjustment racks is located.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 84/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Control unit signaling
The signals on control unit represent the most immediate diagnostic level in the system;
All information about status, alarm, and protection are available on the text display
They are subdivided into three groups:
table 1 – System status
table 2 – SFC status
table 3 – SFC alarms [they signal troubles but allow to complete the starting]
table 4 – SFC Trip [they signal troubles and stop or do not allow the starting
sequences].
LINE 1
LINE 2
LINE 3
LINE 4
F1 F2 F3 F4
PLC VIEWER – LOCAL COMMANDS –
COMMAND NOTES
Active when the converter is running.
PUSHBUTTON
It is used to scroll through the messages displayed from the last
to the first.
Active when the converter is running.
PUSHBUTTON
It is used to scroll through the messages displayed from the first
to the last.
Active when the converter is in block condition.
PUSHBUTTON
It is used to scroll through the messages displayed from the last
to the first.
Active when the converter is in block condition.
PUSHBUTTON
It is used to scroll through the messages displayed from the first
to the last.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 85/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
PLC VIEWER – STATUS
MESSAGE NOTES
Page 1
If all the system is ok, on the first , second and fourth line of
the display device the following messages appear:
ANSALDO SISTEMI INDUSTRIALI
STATUS MODE SFC READY TO START
if the system is not ok, the causes that make not the system
ready appear. (to see under)
with pushbuttons Line Scroll
with pushbuttons Change Page
Page 2
with F1 pushbutton is possible to change the operation mode :
AUTOMATIC MODE [standard mode]
SELECTION MODE SHORT CIRCUIT TEST [ test mode ]
With F2 pushbutton is enabled the start of the test .
With F3 pushbutton is enabled the stop of the test.
F4 pushbutton is not used
Page 3
with F1 pushbutton is possible to enable / disable the test.
COOLING FANS TEST With F2 pushbutton is enabled the start of the test.
With F3 pushbutton is enabled the stop of the test.
F4 pushbutton is not used
Page 4
EVENT LIST with F1 pushbutton is possible to see the alarm list.
With F2 pushbutton is possible to clear the alarm list
With // pushbutton is possible to go out of the page.
MESSAGE LINE 2 Page1 NOTES
INDUSTRIALI Complete vendor name
START SEQUENCE pending action visualized
START TO CRANK SPEED -
CRANK SPEED REACHED -
RAMPING DOWN -
FIRING SPEED REACHED Has been reached the rate of burning flame
ACCEL. TO FINAL SPEED Speeding up to achieve the final speed
MESSAGE LINE 3 Page1 NOTES
WAITING FANS ON waiting for the fans are running
WAITING CLOSING pending action visualized
WAITING EXCITER ON pending action visualized
WAITING IEXC > 30% pending action visualized
WAITING CONVERTER pending action visualized
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 86/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
MESSAGE LINE 4 Page 1 NOTES
SFC READY TO START The converter is ready
SFC NOT READY An alarm or trip is present (see page alarm and trip)
EXTERNAL SWITCH 89SS1 The closing command is sended to the switch
INTERNAL SWITCH 89SFC1 The closing command is sended to the switch
EXTERNAL BREAKER 52SFC The closing command is sended to the 6.6kV Circuit Breaker
INTERNAL BREAKER Q570 The closing command is sended to the 1.55kV Circuit Breaker
PULSES ON The pulses to firing the thyristor are enabled
BLACK START MODE The start with diesel generator is selected
EXTERNAL SWITCH 89SS2 The closing command is sended to the switch
INTERNAL SWITCH 89SFC2 The closing command is sended to the switch
PLC VIEWER – STATUS-
MESSAGE NOTES
The PLC acknowledges a fault on the boxes used for the
PLC I/O FAULT
input/output signal to the PLC.
See PLC MANUAL
For further information see fault table on PLC manual.
PLC SYSTEM FAULT Internal signaling generated by PLC.
See PLC MANUAL For further information see fault table on PLC manual
52SFC EXTERNAL The circuit breaker on 6.6kV is not available
INPUTBREAKER UNAVAILABLE The system is not ready until the circuit breaker is available.
INTERNAL EARTHING SWITCH The converter is grounded
57SFC CLOSE SFC is not ready to starting.
The interlock is activated and the internal switch –89SFC1 is
INTERNAL OUTPUT SWITCH
not enable to working.
89SFC1 INTERLOCK
SFC is not ready to starting.
The hand drive is enabled and the internal switch –89SFC1 is
INTERNAL OUTPUT SWITCH
not enable to working.
89SFC1 HAND DRIVE ON
SFC is not ready to starting.
The interlock is activated and the internal switch –89SFC2 is
INTERNAL OUTPUT SWITCH
not enable to working.
89SFC2 INTERLOCK
SFC is not ready to starting.
The hand drive is enabled and the internal switch –89SFC2 is
INTERNAL OUTPUT SWITCH
not enable to working.
89SFC2 HAND DRIVE ON
SFC is not ready to starting.
The generator voltage greater than 1600V.
GENERATOR VOLTAGE >
The system is not ready until the voltage descend below the
1600V FROM AVR1
1600V.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 87/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
PLC VIEWER – STATUS-
MESSAGE NOTES
The generator voltage greater than 1600V.
GENERATOR VOLTAGE >
The system is not ready until the voltage descend below the
1600V FROM AVR2
1600V.
MAIN CIRCUIT BREAKER The generator is in parallel to the network
52 G1 IS CLOSED SFC is not ready to starting.
MAIN CIRCUIT BREAKER The generator is in parallel to the network
52 G2 IS CLOSED SFC is not ready to starting.
89SS1 EXTERNAL SWTCH The external switch is grounded
CLOSE TO EARTH The system is not ready until the switch is not open
89SS2 EXTERNAL SWTCH The external switch is grounded
CLOSE TO EARTH The system is not ready until the switch is not open
This signaling allows monitoring the status of the internal
power supply switch.
DISCREPANCE STATUS INTER. The cause is probably to be searched in the exchange aux.
SWITCH 89SFC1 Circuits located in the terminal board; that is if both are open
or close this signaling intervenes. The system is not ready
until this signaling is present.
This signaling allows monitoring the status of the internal
power supply switch.
DISCREPANCE STATUS INTER. The cause is probably to be searched in the exchange aux.
SWITCH 89SFC2 Circuits located in the terminal board; that is if both are open
or close this signaling intervenes. The system is not ready
until this signaling is present.
This signaling allows monitoring the status of the external
power supply switch.
DISCREPANCE STATUS EXTER. The cause is probably to be searched in the exchange aux.
SWITCH 89SS1 Circuits located in the terminal board; that is if both are open
or close this signaling intervenes. The system is not ready
until this signaling is present.
This signaling allows monitoring the status of the external
power supply switch.
DISCREPANCE STATUS EXTER. The cause is probably to be searched in the exchange aux.
SWITCH 89SS2 Circuits located in the terminal board; that is if both are open
or close this signaling intervenes. The system is not ready
until this signaling is present.
This signaling allows monitoring the status of the main circuit
breaker power supply switch.
DISCREPANCE STATUS The cause is probably to be searched in the exchange aux.
EXTER. INPUT BREAKER Circuits located in the terminal board; that is if both are open
or close this signaling intervenes. The system is not ready
until this signaling is present.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 88/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
PLC VIEWER – STATUS-
MESSAGE NOTES
STOP FROM MARK VI Request to stop from the gasturbine control
INPUT V LINE The message inform that the power connections of the
REVERSE SEQUENCE network side are not connected correctly.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 89/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
PLC VIEWER – ALARMS AND BLOCKS-
MESSAGE NOTES
EXTERNAL TRIP FROM Remote emergency pushbutton or turbine / generator is
MARK VI – GT1 tripped.
EXTERNAL TRIP FROM Remote emergency pushbutton or turbine / generator is
MARK VI – GT2 tripped.
The circuit breaker Q570 has opened. The causes are to be
MV INPUT BREAKER TRIP 51
searched in the current protection relay (wrong setting or
OVERCURRENT
relay damaged, etc.)
LOCAL EMERGENCY This block is caused by the emergency head placed on the
PUSHBUTTON SB02 control compartment door.
One of five power supply mounted into the control rack is
CONTROL PWRS FAULT
damaged. This is probably due to a breakdown in the
GA10/GA11-1 GA20/GA21-2
circuits from them fed
This block is caused by the thermal pellet located inside the
DC REACTOR MAXIMUM reactor.
TEMPERATURE > 180°C A possible cause can be searched in the reactor cooling
system or in the terminal board connected to the contact.
The magneto thermal breaker supplying the pulse card has
PULSES CARDS POWER
opened or the transformer is damaged. This is probably due
SUPPLY FAULT QE02 OP
to the circuits it protects (DC or thermal calibration, etc.).
The magneto thermal breaker(s) supplying the cooling
FANS BREAKERS TRIP blowers of the power compartments has opened. This is
QV01 or QV02 OPENED probably due to the circuits it protects (DC or thermal
calibration, etc.).
A malfunctioning of the cooling blower of the inductance
DC REACTOR AIR FLOW TO compartment, detected by the anemometer, results in a
LOW (FAN FAULT) converter block. The causes are to be searched in the
blower motor or in the power supply circuit.
A malfunctioning of the cooling blower of the converter
CONVERTER AIR FLOW TO bridge compartment, detected by the anemometer, results
LOW (FAN FAULT) in a converter block. The causes are to be searched in the
blower motor or in the power supply circuit.
The magneto thermal breaker supplying the output switch
MOTOR SWITCH 89SFC1MCB
motor has opened. This is probably due to the circuits it
QE08/QE09 OPENED
protects (DC or thermal calibration, etc.).
The magneto thermal breaker supplying the output switch
MOTOR SWITCH 89SFC2MCB
motor has opened. This is probably due to the circuits it
QE08/QE11 OPENED
protects (DC or thermal calibration, etc.).
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 90/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
PLC VIEWER – ALARMS AND BLOCKS-
MESSAGE NOTES
TRANSDUCER POWER One or both the power supply it is damaged. This is
SUPPLY FAULT GA01-02 probably due to a breakdown in the circuits from them fed
The magneto thermal breaker supplying the transducer h
TRANSDUCERS MCB QE05
has opened. This is probably due to the circuits it protects
OPEND
(DC or thermal calibration, etc.).
This block is caused by the PT100 located inside the
TRANFORMER MAXIMUM windings and core of the transformer
TEMPERATURE TRIP A possible cause can be searched in the cooling system or
in the monitoring temperature unit
This is a signaling to inform the personnel about the cause
TRANSFORMER DOORS of the interruption of the start up sequence.
OPENED - TRIP SFC Once the cause has been cleared the sequence starts
back.
The magneto thermal breaker supplying the control power
CONTROL MCB’s OPEND
supply has opened. This is probably due to the circuits it
QE12(C1)-QE13(C2)
protects (DC or thermal calibration, etc.).
This is a signaling to inform the personnel about the cause
TIMEOUT INTERNAL SWITCH of the interruption of the start up sequence.
89SFC1 NOT CLOSE Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
TIME OUT INTERNAL SWITCH of the interruption of the start up sequence.
89SFC1 NOT OPEN Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
TIMEOUT INTERNAL SWITCH of the interruption of the start up sequence.
89SFC2 NOT CLOSE Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
TIMEOUT INTERNAL SWITCH of the interruption of the start up sequence.
89SFC2 NOT OPEN Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
TIMEOUT EXTERNAL SWTC of the interruption of the start up sequence.
89SS1 NOT CLOSE Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
TIMEOUT EXTERNAL SWTC of the interruption of the start up sequence.
89SS1 NOT OPEN Once the cause has been cleared the sequence starts
back.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 91/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
PLC VIEWER – ALARMS AND BLOCKS-
MESSAGE NOTES
This is a signaling to inform the personnel about the cause
TIMEOUT EXTERNAL SWTC of the interruption of the start up sequence.
89SS2 NOT CLOSE Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
TIMEOUT EXTERNAL SWTC of the interruption of the start up sequence.
89SS2 NOT OPEN Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
TIMEOUT INTERNAL BREAKER of the interruption of the start up sequence.
Q570 NOT CL. Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
TIMEOUT EXTERNAL of the interruption of the start up sequence.
BREAKER 52SFC NOT CL. Once the cause has been cleared the sequence starts
back.
TIMEOUT EXCITATION This is a signaling to inform the personnel that the Exciter 1
SYSTEM 1 NOT READY is not ready to start.
TIMEOUT EXCITATION This is a signaling to inform the personnel that the Exciter 2
SYSTEM 2 NOT READY is not ready to start.
This is a signaling to inform the personnel about the cause
TIMEOUT SIGNAL FROM of the interruption of the start up sequence.
APROT3 IEXC > THRS Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
of the interruption of the start up sequence.
=G3.S07 –AX07 XPROT3
(Input circuit breaker not close)
MISSING INPUT H1-H2
Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
MISSING EXCITATION of the interruption of the start up sequence.
CURRENT FROM AVR1 Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
MISSING EXCITATION of the interruption of the start up sequence.
CURRENT FROM AVR2 Once the cause has been cleared the sequence starts
back.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 92/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
PLC VIEWER – ALARMS AND BLOCKS-
MESSAGE NOTES
This is a signaling to inform the personnel about the cause
of the interruption of the start up sequence.
=G3.S07 –AX07 XPROT3
(external enable)
MISSING INPUT H7
Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
=G3.U01 –AJ01 APROT3 of the interruption of the start up sequence.
ENABLE SWITCH IN OFF Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
NO ROTOR POSITION of the interruption of the start up sequence.
DETECTED - TRIP Once the cause has been cleared the sequence starts
back.
This is a signaling to inform the personnel about the cause
MISSING SPEED of the interruption of the start up sequence.
REFERENCE FROM GTC Once the cause has been cleared the sequence starts
back.
This signaling indicates a PLC low battery. This alarm does
PLC LOW BATTERY
not affect the converter proper operation.
When available, this signaling generates an alarm.
AIR CONDITIONER FAULT or
It is activated when the conditioner in the control
MCB TRIP
compartment fails.
AIR FILTERS CLOGED The shelter filters are dirty.
ZONE A - B It is necessary to change it for a go air exchange.
AIR FILTERS CLOGED The shelter filters in the transformer zone are dirty.
ZONE C It is necessary to change it for a go air exchange.
A malfunctioning of the cooling blower of the transformer
TRANSFORMER AIR FLOW compartment, detected by the anemometer, results in a
TOO LOW (FAN FAULT) converter alarm. The causes are to be searched in the
blower motor or in the power supply circuit.
PT100 UNIT This signalling indicates that the display unit or a
FAULT temperature probe Pt100 is out of order
This alarm is caused by the PT100 located inside the
TRANSFORMER MAXIMUM
windings and core of the transformer
TEMPERATURE ALARM
A possible cause can be searched in the cooling system or
in the monitoring temperature unit
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 93/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
PLC VIEWER – ALARMS AND BLOCKS-
MESSAGE NOTES
The magneto thermal breaker(s) supplying the cooling
TRANSFORMER FAN
blower of the transformer compartment has opened. This is
BREAKER QV03
probably due to the circuits it protects (DC or thermal
OPEN
calibration, etc.).
This signaling allows monitoring the status of the internal
power supply circuit breaker.
DISCREPANCE STATUS The cause is probably to be searched in the exchange aux.
INPUT BREAKER Q570 Circuits located in the terminal board; that is if both are
open or close this signaling intervenes. The system is not
ready until this signaling is present.
AREV11/XREV11CABLES For this signal see paragraph 1.5.4 Hardware Protections
DISCONECTED (0)
MAXIMUM INPUT For this signal see paragraph 1.5.4 Hardware Protections
VOLTAGE > 110% (2)
MINIMUM INPUT For this signal see paragraph 1.5.4 Hardware Protections
VOLTAGE < 85% (3)
MAXIMUM RECTIFIER For this signal see paragraph 1.5.4 Hardware Protections
CURRENT (4)
DIFFERENTIAL CURRENT For this signal see paragraph 1.5.4 Hardware Protections
I’DC < I”DC (7)
DIFFERENTIAL CURRENT For this signal see paragraph 1.5.4 Hardware Protections
I”DC < I’DC (8)
MAXIMUM INVERTER For this signal see paragraph 1.5.4 Hardware Protections
CURRENT (9)
MAXIMUM MOTOR For this signal see paragraph 1.5.4 Hardware Protections
VOLTAGE > 110% (A)
MINIMUM EXCITATION For this signal see paragraph 1.5.4 Hardware Protections
CURRENT < 10% (b)
MAXIMUM EXCITATION For this signal see paragraph 1.5.4 Hardware Protections
CURRENT > 120% (C)
GENERATOR WRONG For this signal see paragraph 1.5.4 Hardware Protections
ROTATION (d)
ACPU02 FAULT For this signal see paragraph 1.5.4 Hardware Protections
TRIP SOFTWARE (E)
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 94/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
PLC VIEWER – ALARMS AND BLOCKS-
MESSAGE NOTES
MAXIMUM PICKUP TIME For this signal see paragraph 1.5.4 Hardware Protections
MOTOR STALL (F)
MAXIMUM SPEED For this signal see paragraph 1.5.4 Hardware Protections
(H)
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 95/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
Led signaling on control card fronts.
More detailed information can be obtained through the led signals on the control card
fronts;
the following pages show the description of led located on the card fronts
LED ON CARD FRONT
CARD NAME LED CODE FUNCTION DESCRIPTION
POSITION COLOUR
2 Aint02 test failed
2 Eeprom parameters lost
ACPU02 [ D ] P Protection
S Suppression state
F-G Regulation state
H01 Green ON Rotor position 1
H02 Red ON Thyristor pulse 1
H03 Green ON Rotor position 2
H04 Red ON Thyristor pulse 2
H05 Green ON Rotor position 3
H06 Red ON Thyristor pulse 3
H07 Green ON Rotor position 4
H08 Red ON Thyristor pulse 4
AGIF11 [ P ]
H09 Green ON Rotor position 5
H10 Red ON Thyristor pulse 5
H11 Green ON Rotor position 6
H12 Red ON Thyristor pulse 6
H13 Green ON Clockwise selection
H14 Green ON Anticlockwise selection
H15 Green ON Rotor position detected
H16 Red ON VF natural switching
H1 Yellow ON current control loop
H2 Yellow ON V/Hz control loop
H3 Yellow ON voltage control loop
H4 Green OFF V input transformer available
APROT3 [ H ]
H5 Green OFF Exciter Ok
H6 Green OFF Hw ok
H7 Green OFF Sw ok
H8 Green OFF Pulse enabled
Segment-type See 1.5.5 “Control hardware protections”
LED
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 96/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.6 INTERFACE OF SYSTEMS
1.6.1 General information
For the general information to receiving, handling, storage, mechanical installation,
electrical connections, preliminary checks, to refer at manual No: 2MU1000132875B01
Container assembly and storage that is an integrant part of this supply.
1.6.2 Board connections
Board connections involve both auxiliary/control cables and power cables designed to
carry high currents.
Auxiliaries/control connections are carried to terminal blocks, while power connections are
carried to copper bus bars of adequate section.
In the specific case board is arranged as follows:
- Power cubicle Terminal block -XT12P Power input mains from m.v.
switchboard and Generator fielding
- Auxiliary cubicle Terminal block -XT21A1 Analog I/O signals
- Auxiliary cubicle Terminal block -XT21A 240/415V 50 Hz auxiliary power
supply
- Auxiliary cubicle Terminal block -XTGT1 Digital INPUT / OUTPUT signals from
gas turbine 1
- Auxiliary cubicle Terminal block -XTGT2 Digital INPUT / OUTPUT signals from
gas turbine 2
- Auxiliary cubicle Terminal block -XTEX Digital INPUT / OUTPUT signals from
external circuit breaker
- Auxiliary cubicle Terminal block -XT21P Internal interconnections
- Auxiliary cubicle Terminal block -XT21 Internal interconnections
Terminal block location may be see on drawing 2FN1000132875C sheet: 070 – 071 that is
an integrant part of functional diagram.
Board shall be grounded by means of ground copper bar – WB01(PE) that is longitudinal
to the board.
Such bar shall be connected to plant grounding system by the installer.
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 97/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
1.6.3 Interface signals list
11)) S
STTA
ATTIIC
CSSTTA
ARRTTE
ERR [[ S
SFFC
C –– G
GTT11 ]]
DIGITAL INPUT Signal Type From Notes Terminal Board
Black start selection Contact NO GTC 1 -XTGT1 - 01 - 04
Normal Start / Stop [ 4CSF-1 ] Contact NO GTC 1 -XTGT1 - 02 - 05
External Trip [ SFC TRIP 1 ] Contact NO Generator protect. 1 -XTGT1 - 03 - 06
Exciter Ready [ EXCIT START RDY_1 ] Contact NO Exciter 1 -XTGT1 - 17- 23
Consent Vgen Min [ STATORVOLT CHK_1 ] Contact NO Exciter 1 Vmachine < 1600 V -XTGT1 - 16 - 22
Position Main Circuit Breaker [ 52G_position ] Contact NC 11,5kV M.C.B. Open status -XTGT1 - 12 - 18
Position Earth ext starting switch [ 89SS_1.1 pos ] Contact NC Earth status -XTGT1 - 15- 21
11,5kV Earthing.
Position ext. starting switch [ 89SS_1.1 opened ] Contact NC Open status -XTGT1 - 13 - 19
Disconnector
Position ext. starting switch [ 89SS_1.1 closed] Contact NO Close status -XTGT1 - 14 - 20
DIGITAL OUTPUT Signal Type To Notes Terminal Board
Starter Alarm [ 30CSF-1 ] Contact SPDT(NO-NC) GTC 1 -XTGT1 - 40 - 42
Starter Trip [ 86CSF-1. ] Contact SPDT(NO-NC) GTC 1 -XTGT1 - 31 - 33
Starter Trip [ 86CSF-1. ] Contact SPDT(NO-NC) GTC 1 -XTGT1 - 34 - 36
Starter Ready [ 3CSF-1 ] Contact SPDT(NO-NC) GTC 1 -XTGT1 - 37 - 39
Starter Running [ 52CSF-1 ] Contact SPDT(NO-NC) GTC 1 -XTGT1 - 43 - 45
Sfc Transformer overheating - alarm Contact SPDT(NO-NC) GCP 1 -XTGT1 - 46 - 48
Sfc Transformer overheating - trip Contact SPDT(NO-NC) GCP 1 -XTGT1 - 49 - 51
Contact NO GTC 1 -XTGT1 - 52 ÷ 53
Status Earth Switch Isolator 52FV [ 57SFC ] [ 52FVCSF-ES-1 ]
Contact NC GTC 1 -XTGT1 - 54 ÷ 55
Start / Stop Request [ EXCIT START CMD_1 ] Contact NO Exciter 1 --XTGT1 - 28 - 29
Closing command switch [ 89SS_1.1 closing ] Contact NO 11,5kV Earthing. -XTGT1 - 24 - 25
Opening command switch [ 89SS_1.1 opening ] Contact NO Disconnector -XTGT1 - 26 - 27
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 98/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
ANALOG INPUT Signal Type From Notes Terminal Board
Speed reference [ 77-CSF-1 ] (420mA) GTC 1 -XT21A1 - 01- 02
Excitation Current Measure [ STARTFLD CURRMEAS_1 ] (420mA) Exciter 1 -XT21A1 - 11- 12
ANALOG OUTPUT Signal Type To Notes Terminal Board
Exciter Angle Reference [ START FLS CURR ADJ_1 ] (420mA) Exciter 1 20mA = no load Curr. -XT21A1 - 21- 22
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 99/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
22)) S
STTA
ATTIIC
CSSTTA
ARRTTE
ERR [[ S
SFFC
C –– G
GTT22 ]]
DIGITAL INPUT Signal Type From Notes Terminal Board
Black start selection Contact NO GTC 2 -XTGT2 - 01 - 04
Normal Start / Stop [ 4CSF-2 ] Contact NO GTC 2 -XTGT2 - 02 - 05
External Trip [ SFC TRIP 2 ] Contact NO Generator protect. 2 -XTGT2 - 03 - 06
Exciter Ready [ EXCIT START RDY_2 ] Contact NO Exciter 2 -XTGT2 - 17- 23
Consent Vgen Min [ STATORVOLT CHK_2 ] Contact NO Exciter 2 Vmachine < 1600 V -XTGT2 - 16 - 22
Position Main Circuit Breaker [ 52G_position ] Contact NC 11,5kV M.C.B. Open status -XTGT2 - 12 - 18
Position Earth ext starting switch [ 89SS_2.2 pos ] Contact NC Earth status -XTGT2 - 15- 21
11,5kV Earthing.
Position ext. starting switch [ 89SS_2.2 opened ] Contact NC Open status -XTGT2 - 13 - 19
Disconnector
Position ext. starting switch [ 89SS_2.2 closed] Contact NO Close status -XTGT2 - 14 - 20
DIGITAL OUTPUT Signal Type To Notes Terminal Board
Starter Alarm [ 30CSF-2 ] Contact SPDT(NO-NC) GTC 2 -XTGT2 - 40 - 42
Starter Trip [ 86CSF-2. ] Contact SPDT(NO-NC) GTC 2 -XTGT2 - 31 - 33
Starter Trip [ 86CSF-2. ] Contact SPDT(NO-NC) GTC 2 -XTGT2 - 34 - 36
Starter Ready [ 3CSF-2 ] Contact SPDT(NO-NC) GTC 2 -XTGT2 - 37 - 39
Starter Running [ 52CSF-2 ] Contact SPDT(NO-NC) GTC 2 -XTGT2 - 43 - 45
Contact NO GTC 2 -XTGT2 - 52 ÷ 53
Status Earth Switch Isolator 52FV [ 57SFC ] [ 52FVCSF-ES-2 ]
Contact NC GTC 2 -XTGT2 - 54 ÷ 55
Sfc Transformer overheating - alarm Contact SPDT(NO-NC) GCP 2 -XTGT2 - 46 - 48
Sfc Transformer overheating - trip Contact SPDT(NO-NC) GCP. 2 -XTGT2 - 49 - 51
Start / Stop Request [ EXCIT START CMD_1 ] Contact NO Exciter 2 --XTGT2 - 28 - 29
Closing command switch [ 89SS_2.2 closing ] Contact NO 11,5kV Earthing. -XTGT2 - 24 - 25
Opening command switch [ 89SS_2.2 opening ] Contact NO Disconnector -XTGT2 - 26 - 27
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 100/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
ANALOG INPUT Signal Type From Notes Terminal Board
Speed reference [ 77-CSF-2 ] (420mA) GTC 2 -XT21A1 - 06- 07
Excitation Current Measure [ STARTFLD CURRMEAS_2 ] (420mA) Exciter2 -XT21A1 - 16- 17
ANALOG OUTPUT Signal Type To Notes Terminal Board
Exciter Angle Reference [ START FLS CURR ADJ_2 ] (420mA) Exciter 2 20mA = no load Curr. -XT21A1 - 26- 27
3) STATIC STARTER [ SFC – M.V.EXTERNAL SWITCHGEAR 6.6KV ]
DIGITAL INPUT Signal Type From Notes Terminal Board
Position Circuit Breaker SFC – 6.6kV Contact NO Open status -XTEX - 01 - 07
[ _____closed ] M.V. 6.6kV
Position Circuit Breaker SFC – 6.6kV Contact NC Switchboard Earthed or extracted -XTEX - 02 - 09
[ _____not available ]
DIGITAL OUTPUT Signal Type From Notes Terminal Board
Permissive to close M.V.6.6kV Switchboard Contact NO -XTEX - 13 - 14
[ _____ ] M.V. 6.6kV
Open with order M.V. 6.6kV Switchboard Contact NC Switchboard -XTEX - 11 - 12
[ _____ ]
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 101/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
AUXILIARY SUPPLY Characteristics From Notes
Required Power
Control & Fans 400 Vac – 3 50Hz Aux. Line 6600 VA
Light & Heaters 230 Vac – 1 50Hz Aux. Line 3700 W
Interlock logic 125 Vdc GE MCC 500W
NOTES AND COMMENTS
FF = FIXED FREQUENCY ( 50 Hz)
FV = VARIABLE FREQUENCY ( 040 Hz)
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 102/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
CSF GENERATOR
CONTROL PANEL 1
-XTGT1 03-06 Input External Trip 1 [SFC TRIP 1 ] Output
-XTGT1 46-48 Output CSF transformer alarm Input
-XTGT1 49-51 Output CSF transformer trip Input
GENERATOR
CONTROL PANEL 2
-XTGT2 03-06 Input External Trip 2 [SFC TRIP 1 ] Output
-XTGT2 46-48 Output CSF transformer alarm Input
-XTGT2 49-51 Output CSF transformer trip Input
11,5kV MAIN BREAKER GT1
-XTGT1 12-18 Input Status Main Breaker Open [ 52G_1.1 position ] Output
11,5kV MAIN BREAKER GT2
-XTGT2 12-18 Input Status Main Breaker Open [ 52G_2.2 position ] Output
SPEEDTRONIC GT1
-XTGT1 02-05 Input Normal Start/Stop [4CSF-1 ] Output
-XTGT1 01-04 Input Black start selection Output
-XTGT1 40-42 Output CSF Alarm [30CSF-1] Input
-XTGT1 31-33 Output CSF Trip [86CSF-1] Input
-XTGT1 37-39 Output CSF Ready [3CSF-1] Input
-XTGT1 43-45 Output CSF Running [52CSF-1] Input
-XTGT1 52-55 [57SFC] Status Earth Switch Isol. 52FV
Input
Output [57SFC] [52FVCSF-ES-1]
Input ( 4 20 mA ) Speed Reference [77-CSF-1 ] Output ( 4 20 mA )
SPEEDTRONIC GT2
-XTGT2 02-05 Input Normal Start/Stop [4CSF-2 ] Output
-XTGT2 01-04 Input Black start selection Output
-XTGT2 40-42 Output CSF Alarm [30CSF-2] Input
-XTGT2 31-33 Output CSF Trip [86CSF-2] Input
-XTGT2 37-39 Output CSF Ready [3CSF-2] Input
-XTGT2 43-45 Output CSF Running [52CSF-2] Input
-XTGT2 52-55 Output Status Earth Switch Isol. 52FV
Input
[57SFC] [57SFC] [52FVCSF-ES-2]
Input ( 4 20 mA ) Speed Reference [77-CSF-2 ] Output ( 4 20 mA )
Continuous in the next sheet
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
GE Energy
Rev. : B
Page : 103/103
OPERATION AND MAINTENANCE MANUAL
DESCRIPTION
continuous from the
preceding sheet
CSF
11,5kV EARTHING
SWITCH GT1
-XTGT1 15-21 Input Status switch 89SS Earth [89SS_1.1 pos] Output
-XTGT1 13-19 Input Status switch 89SS Open [89SS_1.1 opened] Output
-XTGT1 14-20 Input Status switch 89SS Close [89SS_1.1 closed] Output
-XTGT1 24-25 Output Closing command 89SS [89SS_1.1 closing] Input
-XTGT1 26-27 Outpu Opening command 89SS [89SS_1.1 opening] Input
11,5kV EARTHING
SWITCH GT2
-XTGT2 15-21 Input Status switch 89SS Earth [89SS_2.2 pos] Output
-XTGT2 13-19 Input Status switch 89SS Open [89SS_2.2 opened] Output
-XTGT2 14-20 Input Status switch 89SS Close [89SS_2.2 closed] Output
-XTGT2 24-25 Output Closing command 89SS [89SS_2.2 closing] Input
-XTGT2 26-27 Output Opening command 89SS [89SS_2.2 opening] Input
EXCITER GENERATOR 1
Input ( 4 20 mA ) Exciter Current Measure [STAR FLDCURRMEAS_1] Output ( 4 20 mA )
Output ( 4 20 mA ) Exciter Angle Reference [START FLS CURR ADJ_1] Input ( 4 20 mA )
-XTGT1 16-22 Input Consent Vgen. Minimum [STATORVOLT CHK_1] Output (Vgen<1600)
-XTGT1 17-23 Input Exciter Ready [EXCIT START RDY_1] Output
-XTGT1 28-29 Output Start/Stop Request [EXCIT START CMD_1] Input
EXCITER GENERATOR 2
Input ( 4 20 mA ) Exciter Current Measure [STARTFLDCURRMEAS_2] Output ( 4 20 mA )
Output ( 4 20 mA ) Exciter Angle Reference [START FLS CURR ADJ_2] Input ( 4 20 mA )
-XTGT2 16-22 Input Consent Vgen. Minimum [STATOR VOLT CHK_2] Output (Vgen<1600)
-XTGT2 17-23 Input Exciter Ready [EXCIT START RDY_2 Output
-XTGT2 28-29 Output Start/Stop Request [EXCIT START CMD_2] Input
EXTERNAL M.V. SWITCHGEAR
6.6KV
-XTEX 16-26 Input Position Circuit Breaker SFC – 6.6Kv [close] Output
-XTEX 17-27 Input Position Circuit Breaker SFC – 6.6Kv [earthed/extrated] Output
-XTEX 41-43 Output Permissive to close M.V.6.6kV Switchboard Input
-XTEX 41-43 Output Open with order M.V. 6.6kV Switchboard Input
All right reserved copyright
E1018_A140_OMMD_Description_B_en Revision : B Date : 19/05/2011
Das könnte Ihnen auch gefallen
- DeliciousDoughnuts Eguide PDFDokument35 SeitenDeliciousDoughnuts Eguide PDFSofi Cherny83% (6)
- Basic Operation Electrical - Total - Eng - Prot PDFDokument439 SeitenBasic Operation Electrical - Total - Eng - Prot PDFdidik setiawan100% (2)
- 02 Panel LayoutDokument28 Seiten02 Panel LayoutHERMIS RUIZ100% (2)
- Unified Power Flow Controller Technology and ApplicationVon EverandUnified Power Flow Controller Technology and ApplicationBewertung: 4 von 5 Sternen4/5 (5)
- KFM Regler 930M84 - EDokument8 SeitenKFM Regler 930M84 - EZia SultanNoch keine Bewertungen
- HRSG Water Chemistry Control OverviewDokument5 SeitenHRSG Water Chemistry Control OverviewRahul ChoubeyNoch keine Bewertungen
- ChatGpt PDFDokument19 SeitenChatGpt PDFsanx2014100% (1)
- Comparison Between CompetitorsDokument2 SeitenComparison Between Competitorsritesh singhNoch keine Bewertungen
- Generator and Static ExcitationDokument18 SeitenGenerator and Static Excitationmentong100% (1)
- Governor ModelsDokument29 SeitenGovernor ModelsK.Ramachandran100% (1)
- Basler Digital ExcitationDokument8 SeitenBasler Digital ExcitationparatonerqNoch keine Bewertungen
- Decs 250 Basler Excitation SystemsDokument60 SeitenDecs 250 Basler Excitation SystemsAndrea Cupello100% (1)
- Digital Excitation SystemDokument9 SeitenDigital Excitation SystemMauricio GuanellaNoch keine Bewertungen
- Soft StartersDokument4 SeitenSoft StartersShah JayNoch keine Bewertungen
- All Panel DrawingsDokument298 SeitenAll Panel Drawingsghazanfarhayat456Noch keine Bewertungen
- 9-Generator Performance Curves and Static ExciationDokument141 Seiten9-Generator Performance Curves and Static ExciationnboulegrouneNoch keine Bewertungen
- GEH-6794-EX2100e Excitation Control Operation GuideDokument62 SeitenGEH-6794-EX2100e Excitation Control Operation GuideLê Trung Dũng100% (1)
- Brushless Excitation SystemDokument26 SeitenBrushless Excitation SystemManish TiwariNoch keine Bewertungen
- Thyristor Commutation Techniques: Prof. T.K. Anantha Kumar, E&E Dept., MSRITDokument137 SeitenThyristor Commutation Techniques: Prof. T.K. Anantha Kumar, E&E Dept., MSRITPiyush SinghNoch keine Bewertungen
- Generator Protection Applicatin Guide Basler ElectricDokument28 SeitenGenerator Protection Applicatin Guide Basler ElectricSaravanan NatarajanNoch keine Bewertungen
- 3882 1 RG3CatalogueDokument12 Seiten3882 1 RG3CatalogueJose Domingo Castro100% (1)
- 000start - CD - Korangi PowerDokument347 Seiten000start - CD - Korangi PowerMuhammad Younus Shahzad100% (1)
- EX2100 Excitation ControlDokument118 SeitenEX2100 Excitation Controlأبو عبد الرحمن القاضى100% (1)
- What It Feels Like For A Turbine: DisclaimerDokument40 SeitenWhat It Feels Like For A Turbine: DisclaimerBruno BrasilNoch keine Bewertungen
- 08 - 1 GenprotDokument32 Seiten08 - 1 GenprotMoinuddin MohammedNoch keine Bewertungen
- Excitation Sys & SFCDokument55 SeitenExcitation Sys & SFCABVSAI100% (1)
- Basler DECS-400 Instruction ManualDokument227 SeitenBasler DECS-400 Instruction ManualileheNoch keine Bewertungen
- LCI Starters by GE.Dokument28 SeitenLCI Starters by GE.Suraj KumarNoch keine Bewertungen
- EX2100 Excitation SystemDokument26 SeitenEX2100 Excitation SystemJeziel Juárez100% (2)
- Megadrive Lci 1Dokument28 SeitenMegadrive Lci 1lollollol1515615df4gNoch keine Bewertungen
- Turbo GeneratorDokument7 SeitenTurbo GeneratorSagar KhandelwalNoch keine Bewertungen
- Transformer Protection: Prof. Elsayed Hassan Shehab - EldinDokument27 SeitenTransformer Protection: Prof. Elsayed Hassan Shehab - Eldinhekaya1982Noch keine Bewertungen
- Brush Generator CommissioningDokument50 SeitenBrush Generator CommissioningdominickdinoNoch keine Bewertungen
- Harmonics and Reactive Power Compensation in PracticeDokument21 SeitenHarmonics and Reactive Power Compensation in PracticeknarimNoch keine Bewertungen
- GEH 6371 Unit Controller 2000VME (UC2000V) Operation and MaintenanceDokument68 SeitenGEH 6371 Unit Controller 2000VME (UC2000V) Operation and MaintenancemeirangongNoch keine Bewertungen
- Training Session 1 Gas Turbine Basics: by Jim Noordermeer, P.Eng. Gryphon International Engineering Services IncDokument24 SeitenTraining Session 1 Gas Turbine Basics: by Jim Noordermeer, P.Eng. Gryphon International Engineering Services IncM Azri Zulkipli100% (1)
- Stator and Rotor Winding Ground Protection Failures - Maughan-Ground-Relay-2 PDFDokument46 SeitenStator and Rotor Winding Ground Protection Failures - Maughan-Ground-Relay-2 PDFSalvador ArcosNoch keine Bewertungen
- Geh 6415 Control System Toolbox For An LS2100 Static Starter ControlDokument245 SeitenGeh 6415 Control System Toolbox For An LS2100 Static Starter ControlSupolNoch keine Bewertungen
- Generator Speed ControlDokument26 SeitenGenerator Speed ControlagwhiteNoch keine Bewertungen
- Geh 6676BDokument62 SeitenGeh 6676BAli Ball100% (1)
- Basler 200 Manual PDFDokument181 SeitenBasler 200 Manual PDFMelissa Tate100% (2)
- 7SJ62-User Manual PDFDokument536 Seiten7SJ62-User Manual PDFdannrangerNoch keine Bewertungen
- L&T Switchgear List May2022Dokument120 SeitenL&T Switchgear List May2022Anas MohammedNoch keine Bewertungen
- Ansaldo Energia PDFDokument15 SeitenAnsaldo Energia PDFTripti GuptaNoch keine Bewertungen
- Main Generator Online Monitoring and DiagnosticsDokument84 SeitenMain Generator Online Monitoring and DiagnosticsReza100% (2)
- Robicon Perfect Harmony Short OverviewDokument21 SeitenRobicon Perfect Harmony Short OverviewkuchowNoch keine Bewertungen
- Generator Protection 7UM62Dokument39 SeitenGenerator Protection 7UM62Reji Kurian100% (1)
- An Overview of Protection SystemDokument162 SeitenAn Overview of Protection SystemEdward DineshNoch keine Bewertungen
- Swm0008 Iscs Users GuideDokument161 SeitenSwm0008 Iscs Users GuideSalvador FayssalNoch keine Bewertungen
- Gas Turbine Basics BookDokument43 SeitenGas Turbine Basics BookShahzad JamesNoch keine Bewertungen
- TM GE Load Commuted InverterDokument12 SeitenTM GE Load Commuted InverterTufan MaityNoch keine Bewertungen
- Manual Basler Avr Decs250Dokument344 SeitenManual Basler Avr Decs250dhinakaranNoch keine Bewertungen
- Frequency-Power Characteristics of Synchronous GeneratorDokument29 SeitenFrequency-Power Characteristics of Synchronous GeneratorFazalur Rehman Babar75% (4)
- Generator Excitation SystemDokument34 SeitenGenerator Excitation Systemveerclaire83% (6)
- Starting Means System DescriptionDokument2 SeitenStarting Means System DescriptionAbbas AkbarNoch keine Bewertungen
- Numerical Differential Protection of 220/132KV, 250 MVA Auto Transformer Using Siemens Make Differential Relay 7UT612Dokument6 SeitenNumerical Differential Protection of 220/132KV, 250 MVA Auto Transformer Using Siemens Make Differential Relay 7UT612AnilNoch keine Bewertungen
- Regler 930M83 (Gas-Diesel) EDokument8 SeitenRegler 930M83 (Gas-Diesel) EOswaldo LeónNoch keine Bewertungen
- SIM1Dokument1 SeiteSIM1Insan AzizNoch keine Bewertungen
- 1841 EN. Change Variable Speed AETJDokument5 Seiten1841 EN. Change Variable Speed AETJMhan ImanNoch keine Bewertungen
- Steam Turbine Governing Systems OverviewDokument11 SeitenSteam Turbine Governing Systems Overviewdrmsrmurty80% (5)
- Prius UtilDokument14 SeitenPrius UtilManea Ionut Alexandru100% (3)
- Charging PDFDokument16 SeitenCharging PDFred eagle winsNoch keine Bewertungen
- Corona Treater: Operation and MainenanceDokument34 SeitenCorona Treater: Operation and MainenanceJUAN RODRIGUEZNoch keine Bewertungen
- Transformer-Less Voltage Stabilizer Controlled by Proportional-Plus-Integral (PI) ControllerDokument10 SeitenTransformer-Less Voltage Stabilizer Controlled by Proportional-Plus-Integral (PI) ControllerK. RAJA SEKARNoch keine Bewertungen
- Hazard CommunicationDokument7 SeitenHazard CommunicationRahul ChoubeyNoch keine Bewertungen
- Steam Turbine StartupDokument17 SeitenSteam Turbine StartupRahul ChoubeyNoch keine Bewertungen
- STG ESV DetailsDokument95 SeitenSTG ESV DetailsRahul ChoubeyNoch keine Bewertungen
- GT PerformanceDokument22 SeitenGT PerformanceRahul ChoubeyNoch keine Bewertungen
- 50114a Isolemfi 50114a MonoDokument2 Seiten50114a Isolemfi 50114a MonoUsama AwadNoch keine Bewertungen
- IEC TC 56 Dependability PDFDokument8 SeitenIEC TC 56 Dependability PDFsaospieNoch keine Bewertungen
- Music CG 2016Dokument95 SeitenMusic CG 2016chesterkevinNoch keine Bewertungen
- My Mother at 66Dokument6 SeitenMy Mother at 66AnjanaNoch keine Bewertungen
- IMCI Chart BookletDokument43 SeitenIMCI Chart Bookletmysticeyes_17100% (1)
- Student Exploration: Inclined Plane - Simple MachineDokument9 SeitenStudent Exploration: Inclined Plane - Simple MachineLuka MkrtichyanNoch keine Bewertungen
- BrochureDokument3 SeitenBrochureapi-400730798Noch keine Bewertungen
- Catify To Satisfy - Simple Solutions For Creating A Cat-Friendly Home (PDFDrive)Dokument315 SeitenCatify To Satisfy - Simple Solutions For Creating A Cat-Friendly Home (PDFDrive)Paz Libros100% (2)
- Case CapsuleDokument8 SeitenCase CapsuleLiza BulsaraNoch keine Bewertungen
- Biography Thesis ExamplesDokument7 SeitenBiography Thesis Examplesreneewardowskisterlingheights100% (2)
- FIRST SUMMATIVE EXAMINATION IN ORAL COMMUNICATION IN CONTEXT EditedDokument3 SeitenFIRST SUMMATIVE EXAMINATION IN ORAL COMMUNICATION IN CONTEXT EditedRodylie C. CalimlimNoch keine Bewertungen
- Resume: Mr. Shubham Mohan Deokar E-MailDokument2 SeitenResume: Mr. Shubham Mohan Deokar E-MailAdv Ranjit Shedge PatilNoch keine Bewertungen
- Fire Protection in BuildingsDokument2 SeitenFire Protection in BuildingsJames Carl AriesNoch keine Bewertungen
- Cisco UCS Adapter TroubleshootingDokument90 SeitenCisco UCS Adapter TroubleshootingShahulNoch keine Bewertungen
- Scholastica: Mock 1Dokument14 SeitenScholastica: Mock 1Fatema KhatunNoch keine Bewertungen
- Lesson 3 - ReviewerDokument6 SeitenLesson 3 - ReviewerAdrian MarananNoch keine Bewertungen
- Julia Dito ResumeDokument3 SeitenJulia Dito Resumeapi-253713289Noch keine Bewertungen
- Topic 3Dokument21 SeitenTopic 3Ivan SimonNoch keine Bewertungen
- Sociology As A Form of Consciousness - 20231206 - 013840 - 0000Dokument4 SeitenSociology As A Form of Consciousness - 20231206 - 013840 - 0000Gargi sharmaNoch keine Bewertungen
- Fundamentals of Public Health ManagementDokument3 SeitenFundamentals of Public Health ManagementHPMA globalNoch keine Bewertungen
- Sample Resume For Supply Chain Logistics PersonDokument2 SeitenSample Resume For Supply Chain Logistics PersonAmmar AbbasNoch keine Bewertungen
- Sample - SOFTWARE REQUIREMENT SPECIFICATIONDokument20 SeitenSample - SOFTWARE REQUIREMENT SPECIFICATIONMandula AbeyrathnaNoch keine Bewertungen
- Friction: Ultiple Hoice UestionsDokument5 SeitenFriction: Ultiple Hoice Uestionspk2varmaNoch keine Bewertungen
- UltimateBeginnerHandbookPigeonRacing PDFDokument21 SeitenUltimateBeginnerHandbookPigeonRacing PDFMartinPalmNoch keine Bewertungen
- Desktop 9 QA Prep Guide PDFDokument15 SeitenDesktop 9 QA Prep Guide PDFPikine LebelgeNoch keine Bewertungen
- Where We Are in Place and Time "We Are Part of The Universe and Feel Compelled To Explore It."Dokument1 SeiteWhere We Are in Place and Time "We Are Part of The Universe and Feel Compelled To Explore It."Safia-umm Suhaim- FareedNoch keine Bewertungen
- Peer PressureDokument13 SeitenPeer PressuremightymarcNoch keine Bewertungen