Das könnte Ihnen auch gefallen
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDokument15 SeitenElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraNoch keine Bewertungen
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsVon EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNoch keine Bewertungen
- ED LAB ManualDokument31 SeitenED LAB Manualmanoj kumar100% (1)
- Closed Loop Control of Separately Excited DC MotorDokument13 SeitenClosed Loop Control of Separately Excited DC MotorJAIRAJ MIRASHINoch keine Bewertungen
- Ac Machines Lab ManualDokument102 SeitenAc Machines Lab ManualAshwin Gopinath100% (3)
- Drives and Control Lab ManualDokument36 SeitenDrives and Control Lab ManualKabilanNoch keine Bewertungen
- 4 (B) - IM Drives - AC Voltage ControllersDokument71 Seiten4 (B) - IM Drives - AC Voltage ControllersimdadamuNoch keine Bewertungen
- Ed Lab ManualDokument27 SeitenEd Lab ManualBonnieNoch keine Bewertungen
- 17ee82 - Ida - Mod 3 NotesDokument38 Seiten17ee82 - Ida - Mod 3 NotesManish Kumar SahaniNoch keine Bewertungen
- DC Machines Lab ManualDokument56 SeitenDC Machines Lab ManualRockstar RichNoch keine Bewertungen
- Single Phase Rectifier Fed DC Motor DriveDokument11 SeitenSingle Phase Rectifier Fed DC Motor DriveNitesh kumar singh100% (1)
- EEP305 Electric Drives Laboratory PDFDokument14 SeitenEEP305 Electric Drives Laboratory PDFAmit Singh100% (1)
- Question Bank-EE2352 - Solid State DrivesDokument4 SeitenQuestion Bank-EE2352 - Solid State Drivesdgsgovind100% (1)
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDokument3 SeitenExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalNoch keine Bewertungen
- Power Electronics Lab Manual1Dokument72 SeitenPower Electronics Lab Manual1Harish SvNoch keine Bewertungen
- Special Electrical Machines Ee2403 PDFDokument16 SeitenSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- Single Phase Induction Motor Speed ControlDokument35 SeitenSingle Phase Induction Motor Speed ControlHarshit Sengar100% (2)
- III Eee 05 Ee8501 Psa Unit 1Dokument37 SeitenIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANNoch keine Bewertungen
- MP Electrical Drives Lab ManualDokument37 SeitenMP Electrical Drives Lab ManualSoumiya Srinivasan100% (1)
- Brown Final PPT FinalDokument36 SeitenBrown Final PPT FinalDarshan100% (2)
- DC Motor Drives 2007Dokument48 SeitenDC Motor Drives 2007stubborn002Noch keine Bewertungen
- Power Electronics Lab Manual-withoutreadingsandprepostlab-EE0314Dokument69 SeitenPower Electronics Lab Manual-withoutreadingsandprepostlab-EE0314Sankaran Nampoothiri KrishnanNoch keine Bewertungen
- Four Quadrant Operation of DC Drives: - Dual ConvertersDokument12 SeitenFour Quadrant Operation of DC Drives: - Dual ConvertersDr.K.Krishna Veni ProfessorNoch keine Bewertungen
- EPL Lab ManualDokument74 SeitenEPL Lab ManualPrince Vineeth67% (3)
- PSOC 2 Marks With AnswerDokument10 SeitenPSOC 2 Marks With AnswerAnbalagan GuruNoch keine Bewertungen
- Unit 3Dokument5 SeitenUnit 3Narasimman DonNoch keine Bewertungen
- Synchronous Motor DrivesDokument17 SeitenSynchronous Motor DrivessidharthNoch keine Bewertungen
- Prof. Ch. SAI BABU: Online Gate Coaching ClassesDokument103 SeitenProf. Ch. SAI BABU: Online Gate Coaching ClassesHarish B. M.100% (1)
- Speed Control of 3-Phase IMDokument19 SeitenSpeed Control of 3-Phase IMpramana_gmritNoch keine Bewertungen
- PCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveDokument5 SeitenPCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveJanup PokharelNoch keine Bewertungen
- Induction GeneratorDokument12 SeitenInduction GeneratorSumaira SaifNoch keine Bewertungen
- Solid State Controller of Drives - ExperimentDokument37 SeitenSolid State Controller of Drives - ExperimentRakesh Singh LodhiNoch keine Bewertungen
- Electrical Machine-1 Manual PDFDokument40 SeitenElectrical Machine-1 Manual PDFsoumencha80% (5)
- EM-I Lab Viva Questions Updated OnDokument6 SeitenEM-I Lab Viva Questions Updated OnNagamohan BilluNoch keine Bewertungen
- Power Electronics Lab ManualDokument47 SeitenPower Electronics Lab Manualshaan_patil100% (1)
- Induction Motor BrakingDokument26 SeitenInduction Motor BrakingAshwini Singh100% (3)
- Power Plant Lecture Notes - CHAPTER-7 Hydro-Water Power PlantDokument84 SeitenPower Plant Lecture Notes - CHAPTER-7 Hydro-Water Power PlantHiteshNoch keine Bewertungen
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDokument6 SeitenExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNoch keine Bewertungen
- Electrical Drives and Control Lecture NotesDokument128 SeitenElectrical Drives and Control Lecture NotesHarsha Anantwar83% (6)
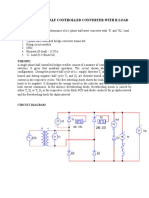
- Single Phase Half Controlled Converter With R LoadDokument3 SeitenSingle Phase Half Controlled Converter With R LoadB ANIL KUMARNoch keine Bewertungen
- PROJCTDokument32 SeitenPROJCTSwati Agarwal100% (1)
- Lecture 03 - CycloconvertersDokument29 SeitenLecture 03 - CycloconvertersdaudiNoch keine Bewertungen
- Drives Manual Final EeeDokument60 SeitenDrives Manual Final EeenandhakumarmeNoch keine Bewertungen
- DC ChoppersDokument38 SeitenDC Chopperspsoumya50% (2)
- V and Inverted V Curves of Synchronous MotorDokument7 SeitenV and Inverted V Curves of Synchronous Motorkarthikeyan249Noch keine Bewertungen
- Speed Control of Universal Motor Using 1 Phase SemiconverterDokument2 SeitenSpeed Control of Universal Motor Using 1 Phase SemiconverterscribsunilNoch keine Bewertungen
- Power Electronics Lab Manual With LogoDokument69 SeitenPower Electronics Lab Manual With LogoPunith Gowda M BNoch keine Bewertungen
- Sem QuestionsDokument11 SeitenSem QuestionsRojaNoch keine Bewertungen
- Power Electronics Lab ManualDokument51 SeitenPower Electronics Lab ManualAnand ShankarNoch keine Bewertungen
- Merz Price Differential Protection For TransformerDokument2 SeitenMerz Price Differential Protection For TransformerapjbalamuruganNoch keine Bewertungen
- AC Voltage Controller: Shahid IqbalDokument39 SeitenAC Voltage Controller: Shahid IqbalZack ZoldyckNoch keine Bewertungen
- Ee2351 Question BankDokument59 SeitenEe2351 Question Banksaran_0666100% (1)
- Pe Final Ex SS 2010-2011Dokument8 SeitenPe Final Ex SS 2010-2011Saif Uddin100% (1)
- Real-Time Simulation Technology for Modern Power ElectronicsVon EverandReal-Time Simulation Technology for Modern Power ElectronicsNoch keine Bewertungen
- Induction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareDokument6 SeitenInduction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareASumeethKumarNoch keine Bewertungen
- Scalar Speed Control of Induction MotorsDokument21 SeitenScalar Speed Control of Induction MotorsRami100% (1)
- Induction Motor.Dokument6 SeitenInduction Motor.Kiran KumarNoch keine Bewertungen
- Lecture 6Dokument31 SeitenLecture 6amanuel abrehaNoch keine Bewertungen
- Edc Notes Unit 5Dokument7 SeitenEdc Notes Unit 5sushant.sahayee20Noch keine Bewertungen
- DownloadsDokument94 SeitenDownloadsVikas NagareNoch keine Bewertungen
- Z MatchDokument2 SeitenZ MatchamrehmaniNoch keine Bewertungen
- M6 ReportDokument25 SeitenM6 ReportMario David Gordillo BenavidesNoch keine Bewertungen
- Basics of Measuring The Dielectric Properties of MaterialsDokument16 SeitenBasics of Measuring The Dielectric Properties of MaterialsYouli TianNoch keine Bewertungen
- Proceedings of National Seminar On Etdg-12Dokument189 SeitenProceedings of National Seminar On Etdg-12Ayush SagarNoch keine Bewertungen
- Southern Cable CatalogDokument62 SeitenSouthern Cable Catalogahish_8955% (20)
- Advanced Foot Step Power Generation Using RFIDDokument29 SeitenAdvanced Foot Step Power Generation Using RFIDNazmul Shikder Riyadh100% (5)
- 1 CM-2600 Series, 2.6" OD BLDC Hollow Shaft Servo Motor/encoder Servomotor/encoderDokument3 Seiten1 CM-2600 Series, 2.6" OD BLDC Hollow Shaft Servo Motor/encoder Servomotor/encoderChandru ChristurajNoch keine Bewertungen
- Package Dimensions: Single-Chip NTSC Color TV ICDokument39 SeitenPackage Dimensions: Single-Chip NTSC Color TV ICrenzoNoch keine Bewertungen
- SPLN 7a - 1978 PDFDokument25 SeitenSPLN 7a - 1978 PDFmahlonpaundananNoch keine Bewertungen
- Troubleshooting Schindler Miconic TX and TX-GCDokument31 SeitenTroubleshooting Schindler Miconic TX and TX-GCDon Luong100% (1)
- Single-Tuned Passive Harmonic Filters Design With Uncertain Source and Load CharacteristicsDokument9 SeitenSingle-Tuned Passive Harmonic Filters Design With Uncertain Source and Load CharacteristicsTuydocuNoch keine Bewertungen
- DIgSILENT RUM11 PDFDokument1 SeiteDIgSILENT RUM11 PDFFERDINADNoch keine Bewertungen
- Murata MA40 SERIESDokument2 SeitenMurata MA40 SERIESMiltonAlvaradoPonceNoch keine Bewertungen
- 08 Ta BWGF 000a B6eDokument3 Seiten08 Ta BWGF 000a B6eAmador AguilaNoch keine Bewertungen
- Ug Physics On 16Dokument59 SeitenUg Physics On 16Ruban PravinNoch keine Bewertungen
- Transformer XII Physics Investigatory ProjectDokument12 SeitenTransformer XII Physics Investigatory ProjectRudraksh SinhaNoch keine Bewertungen
- Generator Synchronous Condenser Conversion - GE Gas PowerDokument1 SeiteGenerator Synchronous Condenser Conversion - GE Gas PowerAnd jazNoch keine Bewertungen
- SUBSTATION OPERATOR - Job Description PDFDokument1 SeiteSUBSTATION OPERATOR - Job Description PDFhabte gebreial shrashrNoch keine Bewertungen
- BTA40 and BTA/BTB41 Series: 40A TriacDokument6 SeitenBTA40 and BTA/BTB41 Series: 40A TriacnandobnuNoch keine Bewertungen
- Henry 5K & 3K Classic ManualDokument42 SeitenHenry 5K & 3K Classic ManualferrofabNoch keine Bewertungen
- Construction Working Operation and Maintenance of Electrostatic PrecipitatoDokument91 SeitenConstruction Working Operation and Maintenance of Electrostatic PrecipitatoWill KisekiNoch keine Bewertungen
- Devicenet Cm059 (Si-N1) Option Technical ManualDokument70 SeitenDevicenet Cm059 (Si-N1) Option Technical ManualKrishna KrishNoch keine Bewertungen
- UT5Dokument15 SeitenUT5Jignesh ShahNoch keine Bewertungen
- Socomec AtysDokument2 SeitenSocomec AtysmehdivinciNoch keine Bewertungen
- STR-W6753: Universal-Input/58 W Off-Line Quasi-Resonant Flyback Switching RegulatorDokument8 SeitenSTR-W6753: Universal-Input/58 W Off-Line Quasi-Resonant Flyback Switching Regulatorlewis gonzalezNoch keine Bewertungen
- Vocational Training (SONU)Dokument11 SeitenVocational Training (SONU)R SharmaNoch keine Bewertungen
- 800 10516Dokument2 Seiten800 10516Gibson FuseNoch keine Bewertungen
- MAGNETISM: Magnetic Fields: Laboratory Report of Group 2Dokument32 SeitenMAGNETISM: Magnetic Fields: Laboratory Report of Group 2MelbertNoch keine Bewertungen
- BLDC Trpezoidal Control PDFDokument35 SeitenBLDC Trpezoidal Control PDFAlei El Din AliNoch keine Bewertungen