Das könnte Ihnen auch gefallen
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosVon EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosBewertung: 5 von 5 Sternen5/5 (1)
- MathWorks India - PID Control Design Made EasyDokument4 SeitenMathWorks India - PID Control Design Made EasyNiranjan BeheraNoch keine Bewertungen
- PID Control ToolkitDokument6 SeitenPID Control ToolkitRobin PathakNoch keine Bewertungen
- To Perform SIL and PIL Testing On Fast D PDFDokument4 SeitenTo Perform SIL and PIL Testing On Fast D PDFgil lerNoch keine Bewertungen
- Pid Controller Tuning in SimulinkDokument7 SeitenPid Controller Tuning in SimulinkRicael SpirandeliNoch keine Bewertungen
- Modelling and Control of DC Motor Speed and Position For Wheel Mobile Robot ApplicationDokument5 SeitenModelling and Control of DC Motor Speed and Position For Wheel Mobile Robot Applicationmusavvirabdul123Noch keine Bewertungen
- PID Speed Controller For DC Motor - Arduino Project HubDokument13 SeitenPID Speed Controller For DC Motor - Arduino Project HubŠarra MkNoch keine Bewertungen
- A Controller Design For Servo Control System Using Different TechniquesDokument8 SeitenA Controller Design For Servo Control System Using Different TechniquesKOKONoch keine Bewertungen
- Benchmarking The Performance of A Dspic Controller Programed With Automatically Generated CodeDokument7 SeitenBenchmarking The Performance of A Dspic Controller Programed With Automatically Generated CodeOmar Milián MorónNoch keine Bewertungen
- DC Motor PI ControllerDokument6 SeitenDC Motor PI ControllerPooja MaathNoch keine Bewertungen
- Video Processing Application: Using Model-Based Design To Develop and Deploy ADokument3 SeitenVideo Processing Application: Using Model-Based Design To Develop and Deploy ANarayana TadankiNoch keine Bewertungen
- Computer Integrated Manufactring (CIM) CellDokument5 SeitenComputer Integrated Manufactring (CIM) CellSAAD ALINoch keine Bewertungen
- Fuzzy Based Pid Controller For Speed Control of D.C. Motor Using LabviewDokument7 SeitenFuzzy Based Pid Controller For Speed Control of D.C. Motor Using LabviewGunpla GandamuNoch keine Bewertungen
- Lab Tutorial & Exercise 6: Code Generation and OptimizationDokument24 SeitenLab Tutorial & Exercise 6: Code Generation and OptimizationtabendaaarzuNoch keine Bewertungen
- I T D T M: Mplementation of HE Igital WIN EthodologyDokument6 SeitenI T D T M: Mplementation of HE Igital WIN EthodologyTrâm Anh NguyenNoch keine Bewertungen
- Sim U Link Conversion TutorialDokument37 SeitenSim U Link Conversion Tutorialdongyu.li1992Noch keine Bewertungen
- Digital Control - 5th LabDokument13 SeitenDigital Control - 5th Labامجد النجارNoch keine Bewertungen
- 05 Introduction PID Controller DesignDokument22 Seiten05 Introduction PID Controller DesignAhtisham195Noch keine Bewertungen
- Design Compensator Using Automated PID TuningDokument30 SeitenDesign Compensator Using Automated PID TuningJesus Honorio Alvarez PaezNoch keine Bewertungen
- PIIIDDokument12 SeitenPIIIDLionel81Noch keine Bewertungen
- Experiment #2 - Introduction To TI C2000 Microcontroller, Code Composer Studio (CCS) and Matlab Graphic User Interface (GUI)Dokument18 SeitenExperiment #2 - Introduction To TI C2000 Microcontroller, Code Composer Studio (CCS) and Matlab Graphic User Interface (GUI)lpestanaNoch keine Bewertungen
- A Flexible Real-Time Motor Control System For Robot JointsDokument4 SeitenA Flexible Real-Time Motor Control System For Robot JointsmalleswarararaoNoch keine Bewertungen
- Rapid Control Prototyping and Hardware-In-The-Loop Using XPC TargetDokument6 SeitenRapid Control Prototyping and Hardware-In-The-Loop Using XPC TargetOsman KutluNoch keine Bewertungen
- Motor Control TI C2000Dokument16 SeitenMotor Control TI C2000Mohammed BelkheiriNoch keine Bewertungen
- B&R Automation Studio Target For SimulinkDokument76 SeitenB&R Automation Studio Target For SimulinkAdrian MeleroNoch keine Bewertungen
- MX009 - Proportional Integral Derivative Control PDFDokument5 SeitenMX009 - Proportional Integral Derivative Control PDFjorgemdp5Noch keine Bewertungen
- AutomationDokument23 SeitenAutomationVikram PareskarNoch keine Bewertungen
- Design and Implementation of PID Controller For Motor Position ControlDokument5 SeitenDesign and Implementation of PID Controller For Motor Position ControlOwais Ahmad KhanNoch keine Bewertungen
- Anti-Windup Control Using A PID Controller - MATLAB & Simulink - MathWorks América LatinaDokument12 SeitenAnti-Windup Control Using A PID Controller - MATLAB & Simulink - MathWorks América Latinanamartinez26Noch keine Bewertungen
- Hydro Power Plant Governor Testing Using Hardware-In-The-Loop SimulationDokument4 SeitenHydro Power Plant Governor Testing Using Hardware-In-The-Loop Simulationemilzaev01Noch keine Bewertungen
- Magnetic Levitation SystemDokument6 SeitenMagnetic Levitation SystemChandra SekharNoch keine Bewertungen
- 8 Ways To Use A Digital Module in A CompactRIO SystemDokument6 Seiten8 Ways To Use A Digital Module in A CompactRIO SystemmafmonteNoch keine Bewertungen
- PID ControlDokument17 SeitenPID ControlUma MageshwariNoch keine Bewertungen
- This Content Downloaded From 201.131.90.36 On Mon, 27 Jul 2020 06:44:25 UTCDokument8 SeitenThis Content Downloaded From 201.131.90.36 On Mon, 27 Jul 2020 06:44:25 UTCDarioMorenoNoch keine Bewertungen
- Lab11 - AutotuningDokument26 SeitenLab11 - AutotuningEng. Ebrahim A. AlrohmiNoch keine Bewertungen
- Lab11 - Autotuning PDFDokument26 SeitenLab11 - Autotuning PDFEng. Ebrahim A. AlrohmiNoch keine Bewertungen
- 1 Syllabus For IINDUSTRY 4.0 - 20 Use CasesDokument5 Seiten1 Syllabus For IINDUSTRY 4.0 - 20 Use Casespavithranofficial38Noch keine Bewertungen
- An Optimal Fuzzy PID ControllerDokument9 SeitenAn Optimal Fuzzy PID ControllerselvamNoch keine Bewertungen
- Anti Pid WindupDokument14 SeitenAnti Pid WindupgirijashankarNoch keine Bewertungen
- V BuilderDokument271 SeitenV Buildershamu081Noch keine Bewertungen
- Ed Current DynamometerDokument3 SeitenEd Current DynamometerOM MUNGELWARNoch keine Bewertungen
- A Design of A PID Self-Tuning Controller Using Labview: Mohammad A. K. Alia, Tariq M. Younes, Shebel A. AlsabbahDokument11 SeitenA Design of A PID Self-Tuning Controller Using Labview: Mohammad A. K. Alia, Tariq M. Younes, Shebel A. AlsabbahEdgar Maya PerezNoch keine Bewertungen
- PI Controller in The Simulink Model Using MATLABDokument9 SeitenPI Controller in The Simulink Model Using MATLABMatlabAsignmentExpertsNoch keine Bewertungen
- DC Motor ControlDokument20 SeitenDC Motor ControlEvrenx InanNoch keine Bewertungen
- 207 00 Analog and Digital Motor Control Teaching SetDokument2 Seiten207 00 Analog and Digital Motor Control Teaching SetDavid de Almeida FiorilloNoch keine Bewertungen
- Matlab Expo 2020 Implementing and Real Time Testing of A Grid Tied Solar Inverter ControllerDokument28 SeitenMatlab Expo 2020 Implementing and Real Time Testing of A Grid Tied Solar Inverter Controllerphthanh04Noch keine Bewertungen
- Calibration Motion Control System-Part2Dokument7 SeitenCalibration Motion Control System-Part2NURUL FATIN HAMIZAH AH SIAK MOHD HELMINoch keine Bewertungen
- Pid MSP PDFDokument6 SeitenPid MSP PDFAlberto Corona MartinezNoch keine Bewertungen
- Implementation of PID Controller PWM Module On FPGADokument5 SeitenImplementation of PID Controller PWM Module On FPGAEditor IJTSRDNoch keine Bewertungen
- 1 Rapid Control Prototyping ............................................................................. 1Dokument8 Seiten1 Rapid Control Prototyping ............................................................................. 1alsamixersNoch keine Bewertungen
- Compact Rio Motor Control Basics Tutorial (8-Slot)Dokument38 SeitenCompact Rio Motor Control Basics Tutorial (8-Slot)Azlan KhudzariNoch keine Bewertungen
- Diseño-Guia 7Dokument9 SeitenDiseño-Guia 7RhinometalI&CNoch keine Bewertungen
- PID Control of Mechanical System Using Suitable Simulation SoftwareDokument12 SeitenPID Control of Mechanical System Using Suitable Simulation Softwareanagha joshiNoch keine Bewertungen
- Embedded Controller For Balancing Type Robot: Jakub Tutro, Krzysztof Wesołowski, Mariusz Pauluk, Dariusz MarchewkaDokument6 SeitenEmbedded Controller For Balancing Type Robot: Jakub Tutro, Krzysztof Wesołowski, Mariusz Pauluk, Dariusz MarchewkaGkkNoch keine Bewertungen
- Guidelines To Pid Controll - LabviewDokument6 SeitenGuidelines To Pid Controll - LabviewJimmy Joel ColqueNoch keine Bewertungen
- 1 Introduction To Real-Time ControlDokument8 Seiten1 Introduction To Real-Time ControlraghavNoch keine Bewertungen
- Model Based Controller Design For A Spherical TankDokument6 SeitenModel Based Controller Design For A Spherical TankInternational Organization of Scientific Research (IOSR)Noch keine Bewertungen
- PID Controller Based DC Motor Speed ControlDokument4 SeitenPID Controller Based DC Motor Speed ControlEditor IJRITCCNoch keine Bewertungen
- EE4415 Integrated Digital Design: Lab (Optional) : Simulation Using VCSDokument17 SeitenEE4415 Integrated Digital Design: Lab (Optional) : Simulation Using VCSZhixiong XieNoch keine Bewertungen
- Chapter 11Dokument12 SeitenChapter 11JeromeNoch keine Bewertungen
- Poutineau (2015) PDFDokument24 SeitenPoutineau (2015) PDFMiguel SzejnblumNoch keine Bewertungen
- Summer Vacation Task HSD-2020-21 Viii & XDokument5 SeitenSummer Vacation Task HSD-2020-21 Viii & XHimansu dasNoch keine Bewertungen
- Pattern in Nature and The Regularities in The WorldDokument11 SeitenPattern in Nature and The Regularities in The Worldjake simNoch keine Bewertungen
- Sek - Men.Keb. Tinggi Melaka (Malacca High School. Estd.1826)Dokument19 SeitenSek - Men.Keb. Tinggi Melaka (Malacca High School. Estd.1826)Lee Shi HockNoch keine Bewertungen
- AI CLIPS TutorialDokument30 SeitenAI CLIPS Tutorialintonation iNoch keine Bewertungen
- Lec 10Dokument4 SeitenLec 10RKD CinemaNoch keine Bewertungen
- Computer Science For The Masses: Robert Sedgewick Princeton UniversityDokument50 SeitenComputer Science For The Masses: Robert Sedgewick Princeton University김형진Noch keine Bewertungen
- Concrete Mix Design Is MethodDokument29 SeitenConcrete Mix Design Is MethodChirag TanavalaNoch keine Bewertungen
- Quay Walls DesignDokument12 SeitenQuay Walls DesignAdrian Frantescu100% (1)
- The Mechanism of Activated Digusion Through Silica GlassDokument9 SeitenThe Mechanism of Activated Digusion Through Silica GlassElenaNoch keine Bewertungen
- Hydra 325 Laboratory Experiment No.1Dokument2 SeitenHydra 325 Laboratory Experiment No.1lalguinaNoch keine Bewertungen
- Calculus PDF Notes 156pages59Dokument13 SeitenCalculus PDF Notes 156pages59Pardeep Singh100% (1)
- Measuring The Acceleration Due To Gravity LabDokument6 SeitenMeasuring The Acceleration Due To Gravity Labapi-616433899Noch keine Bewertungen
- BUOYANCY & FLOTATION - METACENTRIC HEIGHT ReportDokument8 SeitenBUOYANCY & FLOTATION - METACENTRIC HEIGHT Reportميسرة94% (18)
- Chapter 1 Assignment What Is Statistics?Dokument2 SeitenChapter 1 Assignment What Is Statistics?mimoNoch keine Bewertungen
- Boyle's Law: PV Constant. See Also GasesDokument2 SeitenBoyle's Law: PV Constant. See Also GasesMarc Eric Redondo100% (1)
- Minevent 2006 PDFDokument12 SeitenMinevent 2006 PDFJosé Manuel Berrospi CruzNoch keine Bewertungen
- Discuss The Concept of Semantics and Elaborate NameDokument4 SeitenDiscuss The Concept of Semantics and Elaborate NameAnonymous R99uDjYNoch keine Bewertungen
- 34ee79a9746d853ef9fa1f44acc55afeDokument51 Seiten34ee79a9746d853ef9fa1f44acc55afeSai Pavan MarojuNoch keine Bewertungen
- ResearchDokument19 SeitenResearchJonesa SerranoNoch keine Bewertungen
- Math 10 Week 2Dokument10 SeitenMath 10 Week 2Myla MillapreNoch keine Bewertungen
- Quality Control and Analysis: Ujvnl Ae 2016Dokument7 SeitenQuality Control and Analysis: Ujvnl Ae 2016Sagar ThengilNoch keine Bewertungen
- 3 - ANN Part One PDFDokument30 Seiten3 - ANN Part One PDFIsmael EspinozaNoch keine Bewertungen
- MathsDokument16 SeitenMathsAmith LakshmanNoch keine Bewertungen
- AI - Lecture 2 - Uninformed SearchDokument20 SeitenAI - Lecture 2 - Uninformed SearchHunterxHunter03Noch keine Bewertungen
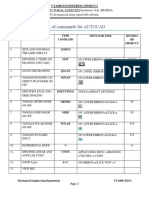
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDokument15 SeitenList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelNoch keine Bewertungen
- Chapter 2: Basic Concepts of Probability Theory: 2.1 Specifying Random ExperimentsDokument6 SeitenChapter 2: Basic Concepts of Probability Theory: 2.1 Specifying Random ExperimentsSonam AlviNoch keine Bewertungen
- Open Set ProofDokument2 SeitenOpen Set Proofsagetbob43Noch keine Bewertungen
- 6 Confidence IntervalsDokument17 Seiten6 Confidence IntervalsLa JeNoch keine Bewertungen