Das könnte Ihnen auch gefallen
- Sistema Passlock Anti-Theft GMDokument11 SeitenSistema Passlock Anti-Theft GMjonattanNoch keine Bewertungen
- Sistema IMMO OFFDokument6 SeitenSistema IMMO OFFLUIS FERNANDO GUIJARRO MOLINANoch keine Bewertungen
- Sensor CKP y CMPDokument10 SeitenSensor CKP y CMPFlorencio Martínez Ken100% (2)
- Formas de Auto Diagnostico AutomotrizDokument6 SeitenFormas de Auto Diagnostico Automotrizhacking1008618Noch keine Bewertungen
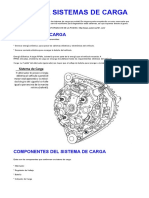
- Beto Booster Curso de Sistema de Carga PDFDokument16 SeitenBeto Booster Curso de Sistema de Carga PDFEddy CatalanNoch keine Bewertungen
- Programar Cuerpo Del Acelerador CTA PDF JagDokument5 SeitenProgramar Cuerpo Del Acelerador CTA PDF JagJorge Antonio Guillen100% (1)
- Informe Practica Banqueo Ecu AutotronicaDokument17 SeitenInforme Practica Banqueo Ecu AutotronicaPaul Dutan100% (2)
- KB: Módulo Controlador de Bomba de Combustible - IntroducciónDokument11 SeitenKB: Módulo Controlador de Bomba de Combustible - IntroducciónJuan MNoch keine Bewertungen
- Comprobaciones Encendidos ElectrónicosDokument12 SeitenComprobaciones Encendidos Electrónicososkar100% (5)
- Diagnostico Del InyectorDokument11 SeitenDiagnostico Del InyectorAndrés Daniel Cárdenas100% (1)
- Valores de Sensores AutomotricesDokument8 SeitenValores de Sensores AutomotricesFranchesca RobalinoNoch keine Bewertungen
- 05 ECM, Memorias RAM, ROM y PROMDokument17 Seiten05 ECM, Memorias RAM, ROM y PROMBryan Ormaza100% (2)
- Ecu Automotriz FuncionamientoDokument4 SeitenEcu Automotriz FuncionamientoMara Callisaya67% (3)
- Diagnostico Por Modo 6Dokument53 SeitenDiagnostico Por Modo 6Ramon Acosta100% (1)
- Programacion de Cuerpo de Aceleracion Sin Escaner - Documentos de GoogleDokument3 SeitenProgramacion de Cuerpo de Aceleracion Sin Escaner - Documentos de GoogleHernan VNoch keine Bewertungen
- ECU Centralita Motor Automovil PDFDokument18 SeitenECU Centralita Motor Automovil PDFoambesiNoch keine Bewertungen
- Onda CKP y CMPDokument3 SeitenOnda CKP y CMPll_luiguiNoch keine Bewertungen
- Qué Es El Módulo IPDM de Nissan y Cómo FuncionaDokument6 SeitenQué Es El Módulo IPDM de Nissan y Cómo FuncionaJhonn Yorin0% (1)
- Sistema de Control de Ralenti Del Tipo Valvula OnDokument4 SeitenSistema de Control de Ralenti Del Tipo Valvula Onenriquevazquez27Noch keine Bewertungen
- Como Hacer Un Probador de Válvulas Iac 4 CablesDokument13 SeitenComo Hacer Un Probador de Válvulas Iac 4 CablesGAUDY ANDRADENoch keine Bewertungen
- Mecanica Automotriz - Medicion de SensoresDokument31 SeitenMecanica Automotriz - Medicion de Sensoresjoana13r75% (4)
- Señales Se Sensores Con OsciloscopioDokument18 SeitenSeñales Se Sensores Con OsciloscopioTavoMorocho75% (4)
- Monitores Sistema EGR PDFDokument5 SeitenMonitores Sistema EGR PDFarnaldo huelNoch keine Bewertungen
- Informe CKP CMP KsDokument13 SeitenInforme CKP CMP KsOrlando Martínez100% (3)
- Dirección Electronica PDFDokument21 SeitenDirección Electronica PDFDanny Cruz MendozaNoch keine Bewertungen
- Ángulo de Avance de Encendido y Tipos de Cámaras de CombustiónDokument12 SeitenÁngulo de Avance de Encendido y Tipos de Cámaras de CombustiónEdgar BautistaNoch keine Bewertungen
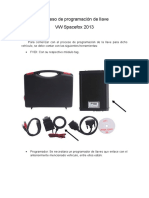
- Proceso de Programación de LlaveDokument9 SeitenProceso de Programación de LlaveNixon MaldonadoNoch keine Bewertungen
- Resumen - Diagnostico de Fallas de Una Transmision AutomáticaDokument4 SeitenResumen - Diagnostico de Fallas de Una Transmision AutomáticaJoel VillacisNoch keine Bewertungen
- Instituto Tecnológico Superior Central Técnico Nombre: Curso: Fecha: Tema: Funcionamiento de La EcuDokument4 SeitenInstituto Tecnológico Superior Central Técnico Nombre: Curso: Fecha: Tema: Funcionamiento de La EcuEsteban SevillaNoch keine Bewertungen
- Sistema de Inyección Electrónico - Gasolina Multipunto Siemens SIMK31Dokument2 SeitenSistema de Inyección Electrónico - Gasolina Multipunto Siemens SIMK31juan100% (1)
- Sensores FORDDokument8 SeitenSensores FORDCharly Hdez EspindolaNoch keine Bewertungen
- Como Hacer Un Probador de Válvulas IAC 4 Cables QDokument22 SeitenComo Hacer Un Probador de Válvulas IAC 4 Cables QJavierPineda100% (2)
- Sistema de Admisión VariableDokument18 SeitenSistema de Admisión Variableseregap84Noch keine Bewertungen
- Lista de Códigos OBD I para Mitsubishi Eclipse 1995Dokument6 SeitenLista de Códigos OBD I para Mitsubishi Eclipse 1995Carlos Arguedas MarinNoch keine Bewertungen
- 4.-Tema Acelerador ElectronicoDokument59 Seiten4.-Tema Acelerador ElectronicoJose Fernando Rodriguez100% (1)
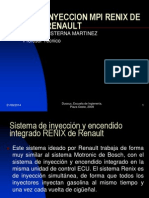
- 6 - Inyeccion Mpi Renix de Renault y WankelDokument38 Seiten6 - Inyeccion Mpi Renix de Renault y WankelramakarunaNoch keine Bewertungen
- Diseño de Una Ecu Automotriz PDFDokument147 SeitenDiseño de Una Ecu Automotriz PDFJESUS LABRADORNoch keine Bewertungen
- Trucos de Autodiagnostico Ford FocusDokument6 SeitenTrucos de Autodiagnostico Ford Focusrockensysa100% (1)
- Pulsador de Inyectores 1Dokument1 SeitePulsador de Inyectores 1Franco RHNoch keine Bewertungen
- Pruebas Del Modulo HEIDokument3 SeitenPruebas Del Modulo HEIBandalitha ArmandoNoch keine Bewertungen
- Sistema PATSDokument14 SeitenSistema PATSJorge Antonio Guillen100% (1)
- Reparacion de Unidades de Control Electronico Del MotorDokument16 SeitenReparacion de Unidades de Control Electronico Del MotortayconsNoch keine Bewertungen
- Toyota Corolla LlavesDokument2 SeitenToyota Corolla LlavesDavidCasiqueNoch keine Bewertungen
- Escaneo AutomotrizDokument31 SeitenEscaneo AutomotrizCarlos CamachoNoch keine Bewertungen
- Cómo Probar El Sensor MAF GM (3.1, 3.3, 3.8 Modelos 1988 - 1996)Dokument9 SeitenCómo Probar El Sensor MAF GM (3.1, 3.3, 3.8 Modelos 1988 - 1996)Daniel RgzNoch keine Bewertungen
- Valvula IACDokument2 SeitenValvula IACmetanirvana100% (2)
- Direccion ElrtronicaDokument183 SeitenDireccion ElrtronicaPatricio ValenciaNoch keine Bewertungen
- Reparacion CentralitaDokument7 SeitenReparacion CentralitaPatrick LopezNoch keine Bewertungen
- Diagrama Electrico Automotriz PDFDokument407 SeitenDiagrama Electrico Automotriz PDFAdolfo Villanueva100% (1)
- ¿Qué Es El CAN BUS y Cómo Funciona - INGENIERÍA Y MECÁNICA AUTOMOTRIZDokument4 Seiten¿Qué Es El CAN BUS y Cómo Funciona - INGENIERÍA Y MECÁNICA AUTOMOTRIZVictor A Ortega DNoch keine Bewertungen
- Mediciones Sobre Sensores NTC, PTC, Map y MafDokument19 SeitenMediciones Sobre Sensores NTC, PTC, Map y MafMarco Antonio Aduviri FernandezNoch keine Bewertungen
- Valvula Iac Control de RalentiDokument15 SeitenValvula Iac Control de Ralentiedge_575Noch keine Bewertungen
- Calibrar Cuerpo Aceleracion NissanDokument1 SeiteCalibrar Cuerpo Aceleracion NissanPablo Giraudo100% (1)
- Estructura EcuDokument37 SeitenEstructura Ecu310477483% (29)
- PPerfil de Grado CrisDokument13 SeitenPPerfil de Grado CrisCristhian ChoqueNoch keine Bewertungen
- Lab 2Dokument3 SeitenLab 2kevin.tristanchoNoch keine Bewertungen
- Manual Mecanica Automotriz Autotronica Descripcion GeneralDokument5 SeitenManual Mecanica Automotriz Autotronica Descripcion GeneralDon GonzaloNoch keine Bewertungen
- Titulo 1Dokument9 SeitenTitulo 1Marcelo LlullunaNoch keine Bewertungen
- Ejemplo de Perfil de ProyectoDokument13 SeitenEjemplo de Perfil de Proyectopiter ayalaNoch keine Bewertungen
- Informe de Sistema de Encendido ConvencionalDokument6 SeitenInforme de Sistema de Encendido Convencionalalex caizaNoch keine Bewertungen
- Parte 2 - Cómo Probar El Módulo de Encendido y Sensor Del Cigüeñal (GM 2.4L)Dokument6 SeitenParte 2 - Cómo Probar El Módulo de Encendido y Sensor Del Cigüeñal (GM 2.4L)rosendo maigaNoch keine Bewertungen
- Guia de Conversion A GLP Automotriz PDFDokument5 SeitenGuia de Conversion A GLP Automotriz PDFrosendo maigaNoch keine Bewertungen
- Bobinas de Encendido Pruebas FallasDokument4 SeitenBobinas de Encendido Pruebas Fallasrosendo maigaNoch keine Bewertungen
- Tabla de Presiones de Bomba de GasolinaDokument1 SeiteTabla de Presiones de Bomba de GasolinaJorge Olvera Martinez84% (106)
- Probador para Inyectores Con Bobina - Hazlo Tú Mismo en Taringa!Dokument6 SeitenProbador para Inyectores Con Bobina - Hazlo Tú Mismo en Taringa!rosendo maiga0% (1)
- Mod - NTICx V 1.3 Mar20 PDFDokument61 SeitenMod - NTICx V 1.3 Mar20 PDFlic mariana boninoNoch keine Bewertungen
- 00 Curriculum Vitae César Augusto Sánchez Preciado - Resumen Mayo 2020Dokument8 Seiten00 Curriculum Vitae César Augusto Sánchez Preciado - Resumen Mayo 2020Roberto CarrascoNoch keine Bewertungen
- Leccion 2 - Examen de Smart ArtDokument2 SeitenLeccion 2 - Examen de Smart ArtmarializbethNoch keine Bewertungen
- Guía de Estudio Capitulo 9-10Dokument12 SeitenGuía de Estudio Capitulo 9-10Cecilia BanegasNoch keine Bewertungen
- Cuestionario de RedesDokument6 SeitenCuestionario de RedesDario EsquinaNoch keine Bewertungen
- Ficha SSTT - Apple Iphone 7PLUSDokument1 SeiteFicha SSTT - Apple Iphone 7PLUSavogelpNoch keine Bewertungen
- Evaluacion Informatica 1º BatanDokument2 SeitenEvaluacion Informatica 1º BatanAlfredo TilleriaNoch keine Bewertungen
- Hojas de Trabajo Segundo BasicoDokument8 SeitenHojas de Trabajo Segundo BasicoJosuè SacNoch keine Bewertungen
- Código de FallaDokument188 SeitenCódigo de FallaMIGUEL PEÑA86% (7)
- IEEE Practicas de Laboratorio 1,2,3,4 - SISTEMAS Embebidos IIDokument5 SeitenIEEE Practicas de Laboratorio 1,2,3,4 - SISTEMAS Embebidos IIjeanNoch keine Bewertungen
- Evolucion de Los Procedadores - Intel PDFDokument8 SeitenEvolucion de Los Procedadores - Intel PDFJordan ChumbesNoch keine Bewertungen
- Introduccion A Las Tic - Heidy LazaroDokument11 SeitenIntroduccion A Las Tic - Heidy LazaroDANIEL FELIPE AYALA ROJASNoch keine Bewertungen
- Actividad 3 Formato Check List Inspeccion TeletrabajoDokument1 SeiteActividad 3 Formato Check List Inspeccion TeletrabajoSergio Jose Silva JimenezNoch keine Bewertungen
- Cuestionario Sistemas Operativos MultiusuarioDokument13 SeitenCuestionario Sistemas Operativos MultiusuarioEd ValenciaNoch keine Bewertungen
- Luces Controladas Con MQTTDokument4 SeitenLuces Controladas Con MQTTGuillermo BravoNoch keine Bewertungen
- Tarea 4 Juan LandaDokument3 SeitenTarea 4 Juan LandaSoluciones MatrizNoch keine Bewertungen
- Protocolo de Conocimientos Acerca de CorposucreDokument17 SeitenProtocolo de Conocimientos Acerca de CorposucreMateo MendozaNoch keine Bewertungen
- Ficha Técnica de Equipos de ComputoDokument2 SeitenFicha Técnica de Equipos de ComputoFidel TorresNoch keine Bewertungen
- 173816Dokument51 Seiten173816I THINK WE'RE DOOMEDNoch keine Bewertungen
- Lista Ttys 26-Mayo-2023Dokument29 SeitenLista Ttys 26-Mayo-2023empleados gonzaloNoch keine Bewertungen
- GL OsarioDokument38 SeitenGL OsarioramonNoch keine Bewertungen
- Daniel Mammani Baltazar Proyecto de GradoDokument124 SeitenDaniel Mammani Baltazar Proyecto de GradoSergio Antonio Añaguaya LazzoNoch keine Bewertungen
- Actividad4 - Arquitectura de Computadoras-CAGDokument6 SeitenActividad4 - Arquitectura de Computadoras-CAGAndres GonzalezNoch keine Bewertungen
- SanzRiescoHector Practica3 Instalar Windows Server 2019Dokument10 SeitenSanzRiescoHector Practica3 Instalar Windows Server 2019Héctor Sanz RiescoNoch keine Bewertungen
- Informe Servicio TecnicoDokument3 SeitenInforme Servicio Tecnicoluchito_262Noch keine Bewertungen
- AppleDokument4 SeitenAppleDanilo J CalvachiNoch keine Bewertungen
- Resumen Evolución Del ComputadorDokument3 SeitenResumen Evolución Del ComputadorMaria José DelgadoNoch keine Bewertungen
- Honeywell ManualDokument244 SeitenHoneywell ManualgelecaustroNoch keine Bewertungen
- Equipo Multifuncional, Copiadora, Impresora, Escaner A3 MonocromaticaDokument2 SeitenEquipo Multifuncional, Copiadora, Impresora, Escaner A3 MonocromaticainversionescomunicacionestapNoch keine Bewertungen
- SilaboDokument4 SeitenSilaboIvan Eduardo Niño GarciaNoch keine Bewertungen