Das könnte Ihnen auch gefallen
- Unité de Remplissage de Bouteille de GazDokument2 SeitenUnité de Remplissage de Bouteille de GazMost Imad100% (2)
- Liaisons Et Assemblage de Pieces Mecaniques Guidage en TranslationDokument5 SeitenLiaisons Et Assemblage de Pieces Mecaniques Guidage en TranslationBen Saber Rahiim100% (1)
- Désignation Des MatériauxDokument5 SeitenDésignation Des MatériauxMIMFS100% (8)
- Biophysique Solutions ÉlectrolytiquesDokument15 SeitenBiophysique Solutions ÉlectrolytiquesNabil holmes100% (3)
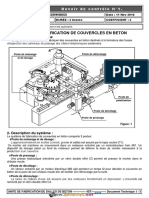
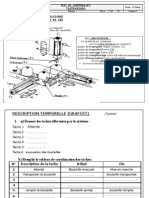
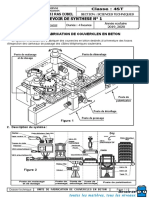
- Devoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenDokument7 SeitenDevoir de Contrôle N°1 - Génie Mécanique - UNITE DE FABRICATION DE DALLES DE BETON - Bac Technique (2016-2017) MR Bakini NoomenKämîŁyä Nádïta100% (1)
- Systeme de Conditionnement de Comprimes PharmaceutiquesDokument7 SeitenSysteme de Conditionnement de Comprimes Pharmaceutiquessaber mecheri100% (2)
- 8c5mn-Poste Automatique de Decoupage de Marbre PDFDokument3 Seiten8c5mn-Poste Automatique de Decoupage de Marbre PDFIbra MoulayNoch keine Bewertungen
- Exiii 2Dokument3 SeitenExiii 2Art Sceno100% (1)
- Examen-Corr GrafcetDokument4 SeitenExamen-Corr GrafcetFatimazahrae AB100% (1)
- Les Eléments StandardDokument6 SeitenLes Eléments StandardMIMFS100% (1)
- Devoir de Synthèse N°3Dokument6 SeitenDevoir de Synthèse N°3Kamel Tayahi0% (1)
- EXERCICE #1: Malaxeur AgroalimentaireDokument5 SeitenEXERCICE #1: Malaxeur Agroalimentairehamdi jihen100% (2)
- TD N 1 Theorie Des MecanismesDokument5 SeitenTD N 1 Theorie Des MecanismesBahaz100% (1)
- 2STM EXERCICES ProcédésDokument19 Seiten2STM EXERCICES ProcédésImane DrihemNoch keine Bewertungen
- Dossier TechniqueDokument6 SeitenDossier Techniqueمحمد بن موسى الخوارزمي0% (1)
- Schéma Cinématique - 2020Dokument4 SeitenSchéma Cinématique - 2020Mohsen LaabidiNoch keine Bewertungen
- TEST N°2-1°A - Remplissage Du GazDokument3 SeitenTEST N°2-1°A - Remplissage Du GazMehdi Ben Arif83% (6)
- Devoir de Contrôle N°1 - Génie Mécanique DT Système de Fabrication Des Pots de Fleurs - Bac Technique (2013-2014) MR HENI ABDELLATIF PDFDokument2 SeitenDevoir de Contrôle N°1 - Génie Mécanique DT Système de Fabrication Des Pots de Fleurs - Bac Technique (2013-2014) MR HENI ABDELLATIF PDFtaiebshow75% (8)
- Cotation FonctionnelleDokument3 SeitenCotation FonctionnelleMIMFS100% (3)
- Devoir de Controle N1-2as-2022Dokument4 SeitenDevoir de Controle N1-2as-2022GR GARMANI100% (2)
- DP - Palettiseur - Corrigé - CouleurDokument4 SeitenDP - Palettiseur - Corrigé - CouleurMaghrebi Yassin100% (1)
- (2019-2020) - DSN°1 - 2ème-Poste de Découpage de Marbre BarraDokument3 Seiten(2019-2020) - DSN°1 - 2ème-Poste de Découpage de Marbre BarraAdam Bensaid100% (1)
- Devoir de Contrôle N°1 - Génie Mécanique Système de Fabrication Des Pots de Fleurs - Bac Technique (2013-2014) MR HENI ABDELLATIF PDFDokument4 SeitenDevoir de Contrôle N°1 - Génie Mécanique Système de Fabrication Des Pots de Fleurs - Bac Technique (2013-2014) MR HENI ABDELLATIF PDFtaiebshow100% (1)
- Devoir de Synthèse N°2 2019 2020 (MR Mustapha Ben Ammar)Dokument14 SeitenDevoir de Synthèse N°2 2019 2020 (MR Mustapha Ben Ammar)Ghayth Bouzayani0% (1)
- Grafcet Synchronisé: I - Description Du SystèmeDokument4 SeitenGrafcet Synchronisé: I - Description Du SystèmeNou Ha BenabdallahNoch keine Bewertungen
- DS11 2017 - 2018Dokument8 SeitenDS11 2017 - 2018Ridha Manaa100% (1)
- Encaisseuse de Coffrets D'extincteurs: 1. Présentation Du SystèmeDokument4 SeitenEncaisseuse de Coffrets D'extincteurs: 1. Présentation Du SystèmeTaieb BentaherNoch keine Bewertungen
- DT 2Dokument5 SeitenDT 2Rami AliNoch keine Bewertungen
- Devoir de Contrôle N°1 - Génie Mécanique Chaîne de Conditionnement de Medicaments - Bac Technique (2016-2017) MR Mlaouhi SlaheddineDokument11 SeitenDevoir de Contrôle N°1 - Génie Mécanique Chaîne de Conditionnement de Medicaments - Bac Technique (2016-2017) MR Mlaouhi SlaheddineDhia Cherni100% (1)
- Dissier TechniqueDokument5 SeitenDissier Techniquentab50% (2)
- Correction Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021Dokument5 SeitenCorrection Devoir+de+Controle+N2 2AS+ Perceuse+Rotative 2021aliNoch keine Bewertungen
- Reduct EurDokument2 SeitenReduct EurOUTEMSAA80% (5)
- Cours Lycée Pilote - Technologie Le GRAFCET - 2ème Sciences (2014-2015) MR Rafik Ben AmorDokument10 SeitenCours Lycée Pilote - Technologie Le GRAFCET - 2ème Sciences (2014-2015) MR Rafik Ben AmorHana KhemissiNoch keine Bewertungen
- Devoir de Contrôle N°1 - Technologie Poste Automatique de Pliage Et de Découpage - 2ème Sciences (2012-2013) MR BAAZAOUI RaoufDokument4 SeitenDevoir de Contrôle N°1 - Technologie Poste Automatique de Pliage Et de Découpage - 2ème Sciences (2012-2013) MR BAAZAOUI Raoufchaouachi alarbiNoch keine Bewertungen
- Devoir de Synthèse N°3 2010 2011 (Hazel T)Dokument9 SeitenDevoir de Synthèse N°3 2010 2011 (Hazel T)Kereme JulienNoch keine Bewertungen
- Devoir de Synthèse N°1 2019 2020 (MR Ben Aouicha)Dokument10 SeitenDevoir de Synthèse N°1 2019 2020 (MR Ben Aouicha)Piere EbrahimNoch keine Bewertungen
- Système Automatique de Découpage - Perçage: TechnologieDokument6 SeitenSystème Automatique de Découpage - Perçage: TechnologieChaabane BOUALINoch keine Bewertungen
- Devoir de Synthèse N°1 - Technologie - Poste Automatique de Remplissage Et D'évacuation Des Boites - 1ère AS (2013-2014) MR BAAZAOUI AbderraoufDokument6 SeitenDevoir de Synthèse N°1 - Technologie - Poste Automatique de Remplissage Et D'évacuation Des Boites - 1ère AS (2013-2014) MR BAAZAOUI AbderraoufAhmed Ahmed100% (1)
- Grafcet Intro V2 FRDokument50 SeitenGrafcet Intro V2 FRJasminNoch keine Bewertungen
- TD 2 Automates Programmables Industriels 2020 - 2021Dokument2 SeitenTD 2 Automates Programmables Industriels 2020 - 2021adamNoch keine Bewertungen
- TD GRAFCET 3ème ST 2010Dokument4 SeitenTD GRAFCET 3ème ST 2010Charaf LeoNoch keine Bewertungen
- Exam API Seer-Gecsi 2020-2021Dokument4 SeitenExam API Seer-Gecsi 2020-2021Safae AbdelmounimNoch keine Bewertungen
- DS1 - DT - Cellule Flexible D'usinageDokument4 SeitenDS1 - DT - Cellule Flexible D'usinageElafif Hamdi0% (1)
- Grafcet 5Dokument2 SeitenGrafcet 5Tarek MehdidNoch keine Bewertungen
- Section Sciences Techniques Epreuve Technologie: Devoir de Controle N°1Dokument5 SeitenSection Sciences Techniques Epreuve Technologie: Devoir de Controle N°1Lotfi NairiNoch keine Bewertungen
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences (2008-2009) Mme Toumi Imen Système Poste de Sertissage de Boites de TomatesDokument6 SeitenDevoir de Synthèse N°1 - Technologie - 2ème Sciences (2008-2009) Mme Toumi Imen Système Poste de Sertissage de Boites de TomatesLassaad HamdiNoch keine Bewertungen
- Dt-Unite de Production Du TSP PDFDokument5 SeitenDt-Unite de Production Du TSP PDFGharbi Saifiddin100% (1)
- 4 SC Tech Ds3!15!16 DT Unite DusinageDokument3 Seiten4 SC Tech Ds3!15!16 DT Unite DusinageDHia Ben AichaNoch keine Bewertungen
- DT DC3 FinaleDokument6 SeitenDT DC3 FinaleChaabane BOUALINoch keine Bewertungen
- 01 Tour ParalleleDokument7 Seiten01 Tour ParallelekhocineNoch keine Bewertungen
- 2-Devoir de Controle N1-2AS-2021Dokument7 Seiten2-Devoir de Controle N1-2AS-2021amri mohamedNoch keine Bewertungen
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences (2014-2015) MR Abdallah RaouafiDokument6 SeitenDevoir de Synthèse N°1 - Technologie - 2ème Sciences (2014-2015) MR Abdallah RaouafiMeriem AbdelhafidhNoch keine Bewertungen
- TD 1Dokument3 SeitenTD 1Bouziri Adel100% (1)
- 4-Devoir de Synthese - Collage Etiquettes-2022Dokument6 Seiten4-Devoir de Synthese - Collage Etiquettes-2022TarekMostaphaNoch keine Bewertungen
- Construction Mécanique - TD Spéciaux - MkaDokument13 SeitenConstruction Mécanique - TD Spéciaux - MkaJordan Yakam0% (1)
- 8c5lh-Unite Automatique de Percage PDFDokument3 Seiten8c5lh-Unite Automatique de Percage PDFIbra MoulayNoch keine Bewertungen
- Devoir 3 Si 2 Bac STM Tri de CaisseDokument11 SeitenDevoir 3 Si 2 Bac STM Tri de CaisseHajar Ben GaraâNoch keine Bewertungen
- Série de TD N-1Dokument2 SeitenSérie de TD N-1khaled kamel BouabdallahNoch keine Bewertungen
- Exercies GRAFCETDokument9 SeitenExercies GRAFCETBac Philosophie-فلسفةباكNoch keine Bewertungen
- Grafcet 2as-2021Dokument66 SeitenGrafcet 2as-2021Mustafa SemmaaNoch keine Bewertungen
- Seie 4 Grafcet 3emeDokument3 SeitenSeie 4 Grafcet 3emeSoumeya MachtaNoch keine Bewertungen
- Devoir de Contrôle N°1 - Technologie - 1ère AS (2015-2016) MR Abdallah Raouafi PDFDokument3 SeitenDevoir de Contrôle N°1 - Technologie - 1ère AS (2015-2016) MR Abdallah Raouafi PDFTitan CR YZNoch keine Bewertungen
- DTDokument6 SeitenDTAnonymous ljWszRodq71% (7)
- dc01 Griffe Cor PDFDokument2 Seitendc01 Griffe Cor PDFChristophe Jean100% (1)
- ANALYSE DESCENDANT (Ex)Dokument4 SeitenANALYSE DESCENDANT (Ex)Med FilaliNoch keine Bewertungen
- Devoir de Synthèse N°1 2014 2015 (Lotfi)Dokument12 SeitenDevoir de Synthèse N°1 2014 2015 (Lotfi)Ines BhaNoch keine Bewertungen
- Fiabilité, maintenance prédictive et vibration des machinesVon EverandFiabilité, maintenance prédictive et vibration des machinesNoch keine Bewertungen
- TechnologieDokument9 SeitenTechnologieمريم عبد الرحمانNoch keine Bewertungen
- Chap-10.EX02 SujDokument5 SeitenChap-10.EX02 SujLouis PouchepadassNoch keine Bewertungen
- Banc D'essais de Flexion 1-6Dokument5 SeitenBanc D'essais de Flexion 1-6taiebshowNoch keine Bewertungen
- Vocabulaire TechniqueDokument26 SeitenVocabulaire TechniquetaiebshowNoch keine Bewertungen
- TP 2Dokument3 SeitenTP 2taiebshowNoch keine Bewertungen
- 6-Accouplements Et Limiteurs de CoupleDokument6 Seiten6-Accouplements Et Limiteurs de Coupletaiebshow100% (1)
- Lecture D'un Dessin D'ensembleDokument12 SeitenLecture D'un Dessin D'ensembleMohsen Laabidi100% (1)
- DT - TP1Dokument3 SeitenDT - TP1taiebshowNoch keine Bewertungen
- Lecture D'un Dessin D'ensembleDokument31 SeitenLecture D'un Dessin D'ensembletaiebshowNoch keine Bewertungen
- EssaiDokument1 SeiteEssaitaiebshowNoch keine Bewertungen
- DT 3Dokument5 SeitenDT 3taiebshowNoch keine Bewertungen
- 2021 SC BAC (Système de Fabrication de Carton Ondulés)Dokument11 Seiten2021 SC BAC (Système de Fabrication de Carton Ondulés)taiebshowNoch keine Bewertungen
- DT TP22Dokument4 SeitenDT TP22taiebshowNoch keine Bewertungen
- Cotation Fonctionnelle 2020Dokument6 SeitenCotation Fonctionnelle 2020Mohsen LaabidiNoch keine Bewertungen
- CH VIII Sollicitation SimpleDokument6 SeitenCH VIII Sollicitation SimpletaiebshowNoch keine Bewertungen
- Lec2 ch7Dokument2 SeitenLec2 ch7taiebshowNoch keine Bewertungen
- ch1 L2Dokument2 Seitench1 L2taiebshowNoch keine Bewertungen
- Lec3 ch2Dokument2 SeitenLec3 ch2taiebshowNoch keine Bewertungen
- 1 Fonctions. 1.2 Réalisation D Une Alimentation Stabilisée. Fonction de L ÉlectroniqueDokument5 Seiten1 Fonctions. 1.2 Réalisation D Une Alimentation Stabilisée. Fonction de L ÉlectroniqueMedySmartNoch keine Bewertungen
- Différentes Co Nfigurations D'Un Train Épicycloïdal.: Corrigé Exercice 1Dokument10 SeitenDifférentes Co Nfigurations D'Un Train Épicycloïdal.: Corrigé Exercice 1taiebshowNoch keine Bewertungen
- Représentation GraphiqueDokument7 SeitenReprésentation GraphiquetaiebshowNoch keine Bewertungen
- Objectif Intermediaire: Etudier Les Principaux Systemes de Transformation de MouvementsDokument79 SeitenObjectif Intermediaire: Etudier Les Principaux Systemes de Transformation de MouvementstaiebshowNoch keine Bewertungen
- Sec 2006 Sib PT PDFDokument50 SeitenSec 2006 Sib PT PDFtaiebshow100% (1)
- Devoir de Synthèse N°1 - Génie Électrique Poste Automatique de Perçage - 3ème Technique (2011-2012) MR Raouafi AbdallahDokument4 SeitenDevoir de Synthèse N°1 - Génie Électrique Poste Automatique de Perçage - 3ème Technique (2011-2012) MR Raouafi Abdallahmohamed ben nouijiNoch keine Bewertungen
- Chap 02 - Le Champs Electrique DiaposDokument23 SeitenChap 02 - Le Champs Electrique Diaposluffycapitaine0221Noch keine Bewertungen
- TP Bois GC4Dokument9 SeitenTP Bois GC4Nick Jordan KEMBOU WOUNTSANoch keine Bewertungen
- Cours Rheologie M2TA PDFDokument36 SeitenCours Rheologie M2TA PDFZahia KoudilNoch keine Bewertungen
- Corrigé Devoir de Contrôle N°1: ChimieDokument2 SeitenCorrigé Devoir de Contrôle N°1: ChimieRiadh Marouani100% (1)
- Oscillations Libres D Un Circuit RLC Serie Cours LatexDokument7 SeitenOscillations Libres D Un Circuit RLC Serie Cours LatexYoussef ElkhalfaouiNoch keine Bewertungen
- Projet DiagnosticDokument30 SeitenProjet Diagnosticamrisalma72Noch keine Bewertungen
- TheseDokument161 SeitenTheseZaki La ColombeNoch keine Bewertungen
- Leau Dans Le Sol IIDokument17 SeitenLeau Dans Le Sol IIInconnu ADZNoch keine Bewertungen
- Les Essais MécaniqueDokument95 SeitenLes Essais Mécaniqueyoussef DhissiNoch keine Bewertungen
- Chapitre 2: Les Séismes Et Leur Relation Avec La Tectonique Des PlaquesDokument46 SeitenChapitre 2: Les Séismes Et Leur Relation Avec La Tectonique Des PlaquesHamid BerradiNoch keine Bewertungen
- Principes de Base IrDokument40 SeitenPrincipes de Base IrBellarguet Faouzi fawziNoch keine Bewertungen
- 24 Chorfi PDFDokument6 Seiten24 Chorfi PDFsalah mohammedNoch keine Bewertungen
- Physico Chimie Des Lubrifiants Amp Theorie de La Lubrification P 87 A 89Dokument6 SeitenPhysico Chimie Des Lubrifiants Amp Theorie de La Lubrification P 87 A 89AdikoDenzeyAnonh100% (1)
- Beni-Mellal-Khenifra Examen Regional PC 2021 Sujet PDFDokument3 SeitenBeni-Mellal-Khenifra Examen Regional PC 2021 Sujet PDFAhmed Taha RazinNoch keine Bewertungen
- PC1ere CD - P6,5 Champ ElestrostatiqueDokument9 SeitenPC1ere CD - P6,5 Champ ElestrostatiqueAdopo100% (1)
- Corps NoirDokument21 SeitenCorps NoirKhaoula LakhfifNoch keine Bewertungen
- LA DILATATIONne2Dokument1 SeiteLA DILATATIONne2Simo ELyamaniNoch keine Bewertungen
- MagnétostatiqueDokument35 SeitenMagnétostatiquejlidsoufiane17Noch keine Bewertungen
- rattrapage 2Dokument4 Seitenrattrapage 2mesmin844Noch keine Bewertungen
- Diagramme de Lair Humide CosticDokument4 SeitenDiagramme de Lair Humide Costicahmed chakrounNoch keine Bewertungen
- rdm2 - Cours - 1-Sollicitations Composées (Simples)Dokument22 Seitenrdm2 - Cours - 1-Sollicitations Composées (Simples)all of asNoch keine Bewertungen
- Mesure de Dephasage Vib3Dokument10 SeitenMesure de Dephasage Vib3Mar WaNoch keine Bewertungen
- Impact Des Murs de Remplissage en Maçonnerie Sur LeDokument243 SeitenImpact Des Murs de Remplissage en Maçonnerie Sur LeMãrielle ĴøřgeñseñNoch keine Bewertungen
- Matériaux de Construction Chapitre1-IntoductionDokument16 SeitenMatériaux de Construction Chapitre1-Intoductionkzi itaNoch keine Bewertungen
- Géotechnique Pont PFEDokument72 SeitenGéotechnique Pont PFEAhmed El EuchiNoch keine Bewertungen
- حسينDokument15 Seitenحسينhoussam badriNoch keine Bewertungen
- Meca Flu td2Dokument3 SeitenMeca Flu td2ZXhNoch keine Bewertungen
- 109 Bael Faessel Mars09Dokument2 Seiten109 Bael Faessel Mars09vedranNoch keine Bewertungen