Das könnte Ihnen auch gefallen
- Aerospace Technologies of Bell Aircraft Company : a Pictorial History (1935-1985)Von EverandAerospace Technologies of Bell Aircraft Company : a Pictorial History (1935-1985)Noch keine Bewertungen
- FRR FinalDokument80 SeitenFRR Finaldth1933Noch keine Bewertungen
- Flight ControllerDokument27 SeitenFlight Controllerprishu kotiyalNoch keine Bewertungen
- Oakton High School Sli CDR ReportDokument52 SeitenOakton High School Sli CDR Reportapi-482725014Noch keine Bewertungen
- RocketDokument19 SeitenRocketapi-305077843Noch keine Bewertungen
- Nozzle Design Optimization To Reduce Noice For Turbo Jet EngineDokument16 SeitenNozzle Design Optimization To Reduce Noice For Turbo Jet EngineSri Tech EngineeringNoch keine Bewertungen
- Newsletter 346Dokument9 SeitenNewsletter 346pete pansNoch keine Bewertungen
- Beginners Guide To Connecting Your RC Plane Electr PDFDokument11 SeitenBeginners Guide To Connecting Your RC Plane Electr PDFMehroos AliNoch keine Bewertungen
- Flight Reference Card Tarot 680 Pro: Airborne Geosciences Facility (Uoe-Ag)Dokument24 SeitenFlight Reference Card Tarot 680 Pro: Airborne Geosciences Facility (Uoe-Ag)Manolo PhintoNoch keine Bewertungen
- Fdocuments - in Rocket Propulsion Prof K Ramamurthi Department of Nptelacinreviewedpdfs112106073lec35pdfDokument28 SeitenFdocuments - in Rocket Propulsion Prof K Ramamurthi Department of Nptelacinreviewedpdfs112106073lec35pdfKannan RamarajNoch keine Bewertungen
- RadioLink AT10II User ManualDokument84 SeitenRadioLink AT10II User ManualMiguel Sanchez100% (1)
- Brochure Cavalon ENG PDFDokument20 SeitenBrochure Cavalon ENG PDFfjfluzNoch keine Bewertungen
- Tech - Pub - 28 Selecting Rocket MotorsDokument12 SeitenTech - Pub - 28 Selecting Rocket Motorsexper626Noch keine Bewertungen
- Estes Model Rocket EnginesDokument1 SeiteEstes Model Rocket Enginesaaguiar1Noch keine Bewertungen
- AK1-3 Helicopter Standard Specification PDFDokument49 SeitenAK1-3 Helicopter Standard Specification PDFEstevam Gomes de AzevedoNoch keine Bewertungen
- Model Rocket AccelerometerDokument10 SeitenModel Rocket AccelerometerAviation/Space History LibraryNoch keine Bewertungen
- Me 1000RW PDFDokument25 SeitenMe 1000RW PDFCarlaine Martins VieiraNoch keine Bewertungen
- Techniques For Measurement of Dynamic Stability Derivatives in Ground Test FacilitiesDokument236 SeitenTechniques For Measurement of Dynamic Stability Derivatives in Ground Test FacilitieseeebbbuuuNoch keine Bewertungen
- Parts Catalog For Engine SeriesDokument72 SeitenParts Catalog For Engine Seriesjuantalamera63299Noch keine Bewertungen
- Solid Motor Rocket PropulsionDokument3 SeitenSolid Motor Rocket PropulsionRiyaz AhamedNoch keine Bewertungen
- Rocket Altitude Prediction ChartsDokument45 SeitenRocket Altitude Prediction ChartsAviation/Space History Library100% (1)
- Rocketry AerodynamicsDokument56 SeitenRocketry AerodynamicsHyan GontijoNoch keine Bewertungen
- Hybrid Rocket PDFDokument40 SeitenHybrid Rocket PDFChonk LeeNoch keine Bewertungen
- Flatback Airfoil Wind Tunnel ExperimentDokument37 SeitenFlatback Airfoil Wind Tunnel Experimentvictoria100% (1)
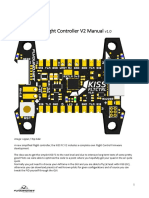
- Flyduino KISS Flight Controller V2 Manual: Image: Upper / Top SideDokument19 SeitenFlyduino KISS Flight Controller V2 Manual: Image: Upper / Top SideBruno MarcheseNoch keine Bewertungen
- Flight StarDokument3 SeitenFlight Starmilek2910Noch keine Bewertungen
- MA 4701 AY 15 S1 Aircraft Design - Course Activities and PlanningDokument26 SeitenMA 4701 AY 15 S1 Aircraft Design - Course Activities and PlanningKhim YangNoch keine Bewertungen
- Type Cert A718Dokument6 SeitenType Cert A718skatterbrainkidNoch keine Bewertungen
- Ops-Core Dh-132 HelmetDokument4 SeitenOps-Core Dh-132 HelmetDenbe SantosNoch keine Bewertungen
- Control Line Scale ModelingDokument133 SeitenControl Line Scale Modelingamsci99Noch keine Bewertungen
- Motor of VTOL Aircraft PDFDokument22 SeitenMotor of VTOL Aircraft PDFvimarsh joshiNoch keine Bewertungen
- Coaxial Heli DynamicsDokument11 SeitenCoaxial Heli DynamicsRohit GuptaNoch keine Bewertungen
- Dragon Spacecraft Measured DrawingDokument2 SeitenDragon Spacecraft Measured Drawingnab05Noch keine Bewertungen
- July 9, 1968 T M. A. Cardoso 3,391,746: Helicopter Control System Filed May 15, 1967 3 Sheets-Sheet 1Dokument7 SeitenJuly 9, 1968 T M. A. Cardoso 3,391,746: Helicopter Control System Filed May 15, 1967 3 Sheets-Sheet 1rte678Noch keine Bewertungen
- LIPO and Much More About Electrical Radio ControlledDokument86 SeitenLIPO and Much More About Electrical Radio ControlledjallehvNoch keine Bewertungen
- Brock Technologies UAV Pneumatic Catapult BrochureDokument1 SeiteBrock Technologies UAV Pneumatic Catapult BrochureUAVs AustraliaNoch keine Bewertungen
- Emeraude ManualDokument23 SeitenEmeraude ManuallarsandNoch keine Bewertungen
- Build A Homebrew Radio Telescope-QST-0609 PDFDokument5 SeitenBuild A Homebrew Radio Telescope-QST-0609 PDFMichelepioNoch keine Bewertungen
- Saturn V - Wikipedia, The Free EncyclopediaDokument25 SeitenSaturn V - Wikipedia, The Free EncyclopediaPramod ShriwastavaNoch keine Bewertungen
- Bensen b8 PDFDokument8 SeitenBensen b8 PDFmaxNoch keine Bewertungen
- Wmci-Estes Rocket ManualDokument34 SeitenWmci-Estes Rocket ManualJose MiguelNoch keine Bewertungen
- Helicopters and HovercraftsDokument14 SeitenHelicopters and Hovercraftstushar joshiNoch keine Bewertungen
- Rucsac ZburatorDokument39 SeitenRucsac ZburatorBrandy Roman100% (1)
- Drag of Airplane Wheels, Wheel Fairings and Landing Gear I - NACA RPT 485 PDFDokument35 SeitenDrag of Airplane Wheels, Wheel Fairings and Landing Gear I - NACA RPT 485 PDFLysterNoch keine Bewertungen
- US2579903 - Periscopic Sextant - Kollsman, 1951Dokument9 SeitenUS2579903 - Periscopic Sextant - Kollsman, 1951devheadbot100% (1)
- MIT Rocket Team Fin Flutter ResearchDokument25 SeitenMIT Rocket Team Fin Flutter ResearchRandy WigginsNoch keine Bewertungen
- Strela: Launch Vehicle User ManualDokument63 SeitenStrela: Launch Vehicle User ManualbospankerNoch keine Bewertungen
- Cheap RC Fly BabyDokument3 SeitenCheap RC Fly Babyozar359Noch keine Bewertungen
- Mini Gas Turbines Final ReportDokument88 SeitenMini Gas Turbines Final ReportRavi Kumar Bandarulanka100% (1)
- Uav PredatorDokument10 SeitenUav PredatorViperous PramodNoch keine Bewertungen
- 134 Corby StarletDokument5 Seiten134 Corby StarletFrancisco SantosNoch keine Bewertungen
- R/C Soaring Digest - Apr 2012Dokument68 SeitenR/C Soaring Digest - Apr 2012Aviation/Space History LibraryNoch keine Bewertungen
- Uav Ugv 2Dokument9 SeitenUav Ugv 2Mauricio DIAZNoch keine Bewertungen
- XFLR5 - and - Stability - Analysis PDFDokument41 SeitenXFLR5 - and - Stability - Analysis PDFleoneldeutschNoch keine Bewertungen
- MAU-12A.A Bomb Ejector Rack Stress Analysis (June 1964) PDFDokument107 SeitenMAU-12A.A Bomb Ejector Rack Stress Analysis (June 1964) PDFBlaze123xNoch keine Bewertungen
- Guidance AlgorithmsDokument12 SeitenGuidance Algorithmsanil2383100% (1)
- P-15 Termit: Anti-Ship Missile Soviet UnionDokument4 SeitenP-15 Termit: Anti-Ship Missile Soviet UnionJuan Gomez GomezNoch keine Bewertungen
- Cessna 182 48in Plans Free Download - AeroFred - Download Free Model Airplane Plans PDFDokument5 SeitenCessna 182 48in Plans Free Download - AeroFred - Download Free Model Airplane Plans PDFVicente Masias100% (1)
- FMR - Thesis - Group 5 (Final)Dokument26 SeitenFMR - Thesis - Group 5 (Final)Queen ZaportizaNoch keine Bewertungen
- ARRB Roads Materials Best Practice Guide PDFDokument149 SeitenARRB Roads Materials Best Practice Guide PDFMaxNoch keine Bewertungen
- Mgt314-2 Ga-2 Waiting Line Presentation SlidesDokument10 SeitenMgt314-2 Ga-2 Waiting Line Presentation SlidesMohammadFaahadHossainNoch keine Bewertungen
- Worksheet For Creating A Project CharterDokument5 SeitenWorksheet For Creating A Project CharterDianaNoch keine Bewertungen
- Sleep Deprivation PowerpointDokument24 SeitenSleep Deprivation Powerpointapi-302310876100% (1)
- Oman Oil and Gas Cost Estimating FeaturedPaper2Dokument22 SeitenOman Oil and Gas Cost Estimating FeaturedPaper2zhangjieNoch keine Bewertungen
- Case StudyDokument7 SeitenCase StudyMotilaldass100% (1)
- C 21Dokument18 SeitenC 21Priyanka RoyNoch keine Bewertungen
- CAAV Sample Operations ManualDokument36 SeitenCAAV Sample Operations ManualBheki TshimedziNoch keine Bewertungen
- Theories of International Migration - A Review and AppraisalDokument37 SeitenTheories of International Migration - A Review and AppraisalThaysa AndréiaNoch keine Bewertungen
- Aero Q409 PDFDokument32 SeitenAero Q409 PDFSergey DNoch keine Bewertungen
- Maynilad 2018 ARDokument162 SeitenMaynilad 2018 ARRicoNoch keine Bewertungen
- Shane's StoryDokument15 SeitenShane's StorypericciaNoch keine Bewertungen
- HSE Welcome Book For ContractorDokument58 SeitenHSE Welcome Book For ContractorHunterNoch keine Bewertungen
- Risk Cooling TowerDokument4 SeitenRisk Cooling TowerHariharan MuthukrishananNoch keine Bewertungen
- Literature Review On Cost Reduction and ControlDokument7 SeitenLiterature Review On Cost Reduction and Controlfat1kifywel3100% (1)
- London 2012 Olympic Safety and Security Strategic Risk Assessment (OSSSRA) and Risk Mitigation ProcesDokument12 SeitenLondon 2012 Olympic Safety and Security Strategic Risk Assessment (OSSSRA) and Risk Mitigation ProcescarlesmorenoNoch keine Bewertungen
- Silva 2020 - Common Mental Disorders Prevalence in Adolescents A Systematic Review and Meta - AnalysesDokument20 SeitenSilva 2020 - Common Mental Disorders Prevalence in Adolescents A Systematic Review and Meta - AnalysesErica EricaNoch keine Bewertungen
- TitagarhDokument94 SeitenTitagarhdhruvfeedbackNoch keine Bewertungen
- The Creative Bureaucracy 2Dokument45 SeitenThe Creative Bureaucracy 2IndirannaNoch keine Bewertungen
- MalpracticeDokument5 SeitenMalpracticeAntónio Ayrton WidiastaraNoch keine Bewertungen
- European Union Risk Assessment Report Vol. 28, 1st Priority List - Acrylic Acid PDFDokument136 SeitenEuropean Union Risk Assessment Report Vol. 28, 1st Priority List - Acrylic Acid PDFVeronica Yesenia Arevalo BernalNoch keine Bewertungen
- 6 Tamulto 21 DecDokument18 Seiten6 Tamulto 21 Dectoyi kamiNoch keine Bewertungen
- Risk Assessment: An Introduction: PurposeDokument31 SeitenRisk Assessment: An Introduction: PurposeJack PNoch keine Bewertungen
- Reputation Risk: A Rising C-Suite ImperativeDokument24 SeitenReputation Risk: A Rising C-Suite ImperativeTita RahmasariNoch keine Bewertungen
- 8 Science 2022 Assessment Task 2 SRP James UDokument26 Seiten8 Science 2022 Assessment Task 2 SRP James UJames UteteNoch keine Bewertungen
- Alm Review of LiteratureDokument17 SeitenAlm Review of LiteratureSai ViswasNoch keine Bewertungen
- Full Download Industrial Safety and Health Management 6th Edition Asfahl Test BankDokument36 SeitenFull Download Industrial Safety and Health Management 6th Edition Asfahl Test Bankalexanderstec100% (38)
- TVC - HOP Up Platform - Task SheetDokument3 SeitenTVC - HOP Up Platform - Task SheetLeeJB09Noch keine Bewertungen