Das könnte Ihnen auch gefallen
- Informe TDM DigitalesDokument11 SeitenInforme TDM DigitalesRiverDavid RodriguezNoch keine Bewertungen
- ASTERISKDokument14 SeitenASTERISKRiverDavid RodriguezNoch keine Bewertungen
- Ingles TecnicoDokument2 SeitenIngles TecnicoRiverDavid RodriguezNoch keine Bewertungen
- CARACTERÍSTICAS DEL SECTOR DE LAS TELECOMUNICACIONES EN EL PERÚ - 1 de Junio 2020Dokument22 SeitenCARACTERÍSTICAS DEL SECTOR DE LAS TELECOMUNICACIONES EN EL PERÚ - 1 de Junio 2020RiverDavid RodriguezNoch keine Bewertungen
- Iot Apuntes Del Texto Iot MeterDokument1 SeiteIot Apuntes Del Texto Iot MeterRiverDavid RodriguezNoch keine Bewertungen
- Siílabo Redacción y Técnicas de Comunicación Efectiva IDokument5 SeitenSiílabo Redacción y Técnicas de Comunicación Efectiva IRiverDavid RodriguezNoch keine Bewertungen
- TEMAS PARA LA MONOGRAFÍA InvestigaciónDokument2 SeitenTEMAS PARA LA MONOGRAFÍA InvestigaciónRiverDavid RodriguezNoch keine Bewertungen
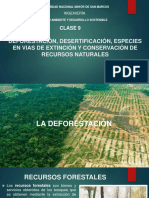
- Clase 9 Deforestación, Desertificación, Especies en Vias de PDFDokument47 SeitenClase 9 Deforestación, Desertificación, Especies en Vias de PDFRiverDavid RodriguezNoch keine Bewertungen
- FISIcaDokument13 SeitenFISIcajacobo galicinoNoch keine Bewertungen
- EcuacionesDokument13 SeitenEcuacionesNathali Mhilena TNoch keine Bewertungen
- Formas Farmaceuticas SemisólidasDokument13 SeitenFormas Farmaceuticas SemisólidasJesica AntezanaNoch keine Bewertungen
- 1 PDFDokument218 Seiten1 PDFAlejandroPedroMundacaMalcaNoch keine Bewertungen
- Analisis Temperatura Motor DCDokument3 SeitenAnalisis Temperatura Motor DC_ssantiago_Noch keine Bewertungen
- Formato de Presentación RevisionDokument4 SeitenFormato de Presentación RevisionDiana RamosNoch keine Bewertungen
- Probabilidad y Estadística II (Diagrama de Arbol)Dokument12 SeitenProbabilidad y Estadística II (Diagrama de Arbol)Deyci Fabiola Villarreal AlvaradoNoch keine Bewertungen
- Tesis Psicoterapia CorporalDokument277 SeitenTesis Psicoterapia CorporalAlexis Harley Merchán Jaimes100% (1)
- Aceleración PositivaDokument2 SeitenAceleración PositivaLester Giovanni Tut Cuc50% (2)
- Balances de Materia y Energía 2016-17 Sol PDFDokument15 SeitenBalances de Materia y Energía 2016-17 Sol PDFRakel Martinez AlonsoNoch keine Bewertungen
- Acotacio 3.0Dokument10 SeitenAcotacio 3.0David UlloaNoch keine Bewertungen
- Tarea 2 Nancy Rocio CardenasDokument4 SeitenTarea 2 Nancy Rocio Cardenasdiego fernandoNoch keine Bewertungen
- Intervalos de Tiempo para Primero de SecundariaDokument5 SeitenIntervalos de Tiempo para Primero de SecundariaVale NoriegaNoch keine Bewertungen
- Sistemas Axiomáticos PDFDokument15 SeitenSistemas Axiomáticos PDFAna MenegottoNoch keine Bewertungen
- Transmisiones MecanicasDokument26 SeitenTransmisiones Mecanicasalvaroazuaje100% (3)
- Calibracion ParshallDokument9 SeitenCalibracion Parshallgalindo423Noch keine Bewertungen
- Excavadora PC 1250 PDFDokument20 SeitenExcavadora PC 1250 PDFMoises AnguloNoch keine Bewertungen
- Modelos en Tiempo DiscretoDokument41 SeitenModelos en Tiempo DiscretoMichael ßermeoNoch keine Bewertungen
- Calculo Del Factor Rueda en Puente PDFDokument15 SeitenCalculo Del Factor Rueda en Puente PDFjosedoria2014Noch keine Bewertungen
- Ejercicios Segundo GradoDokument76 SeitenEjercicios Segundo GradoEleazar González Rodríguez100% (2)
- Manual Ecotect Espanol 7Dokument35 SeitenManual Ecotect Espanol 7api-3734319100% (2)
- Clase 3Dokument17 SeitenClase 3Daniela Francisca Arcos GomezNoch keine Bewertungen
- Estudio MeteorológicoDokument35 SeitenEstudio MeteorológicolordwhiteNoch keine Bewertungen
- Memoria Tecnica DescriptivaDokument16 SeitenMemoria Tecnica DescriptivaJose Luis Rodriguez RezaNoch keine Bewertungen
- EspejitoDokument5 SeitenEspejitoDaniel Alejandro Lara CidNoch keine Bewertungen
- Fisiología Basada en El Lenguaje de La Medicina Clásica ChinaDokument6 SeitenFisiología Basada en El Lenguaje de La Medicina Clásica ChinaCentre Wudang Taichi-qigong100% (1)
- Mud CleanerDokument11 SeitenMud CleanerCristian ErickNoch keine Bewertungen
- INFORME de Quimica 3Dokument12 SeitenINFORME de Quimica 3Alexander Curo GarciaNoch keine Bewertungen
- Evaluar Sistemas de Gas Licuado Del Petróleo Según Procedimientos Técnicos y NormativaDokument3 SeitenEvaluar Sistemas de Gas Licuado Del Petróleo Según Procedimientos Técnicos y NormativaDaniela M Gutiérrez SierraNoch keine Bewertungen
- Capítulo 2 Estabilidad UTN FRDDokument10 SeitenCapítulo 2 Estabilidad UTN FRDVolniNoch keine Bewertungen